干扰检测和干扰容许运动控制的制作方法
本说明书涉及一种飞行器反推器致动系统。
背景技术:
1、当代的飞行器引擎可以包括反推器致动系统(tras),以协助在着陆期间降低飞行器速度。典型的反推器包括可移动的平移整流罩(transcowl),所述可移动的平移整流罩在处于活动定位中时使通过引擎的气流中的至少一部分反向。先前的反推器设计已经实现了用于平移整流罩元件的厚重材料,并且已经实现了重的基于流体(例如,液压)的致动器来移动它们。因为减轻重量经常是飞行器设计中的优先事项,所以经常寻求更轻的解决方案,诸如通过设计更轻、更薄的平移整流罩元件和/或通过使用更轻重量的电致动器(例如,机电反推致动或emtras)。
2、对于液压和电动tras的关键挑战之一是,为了燃油效率,向着更高的燃气涡轮引擎旁通比的趋势已经造成了更大直径、更柔韧的平移整流罩。然而,这样的修改可能引入新的问题。例如,更薄的平移整流罩元件可能相对更柔软,并且遭受比它们的前辈更多的机械干扰,并且更小和更轻的致动器可能不总是能够提供足够的蛮力功率来防止或克服这样的弯曲和干扰。
技术实现思路
1、总的来说,本文献描述了一种反推器致动系统。
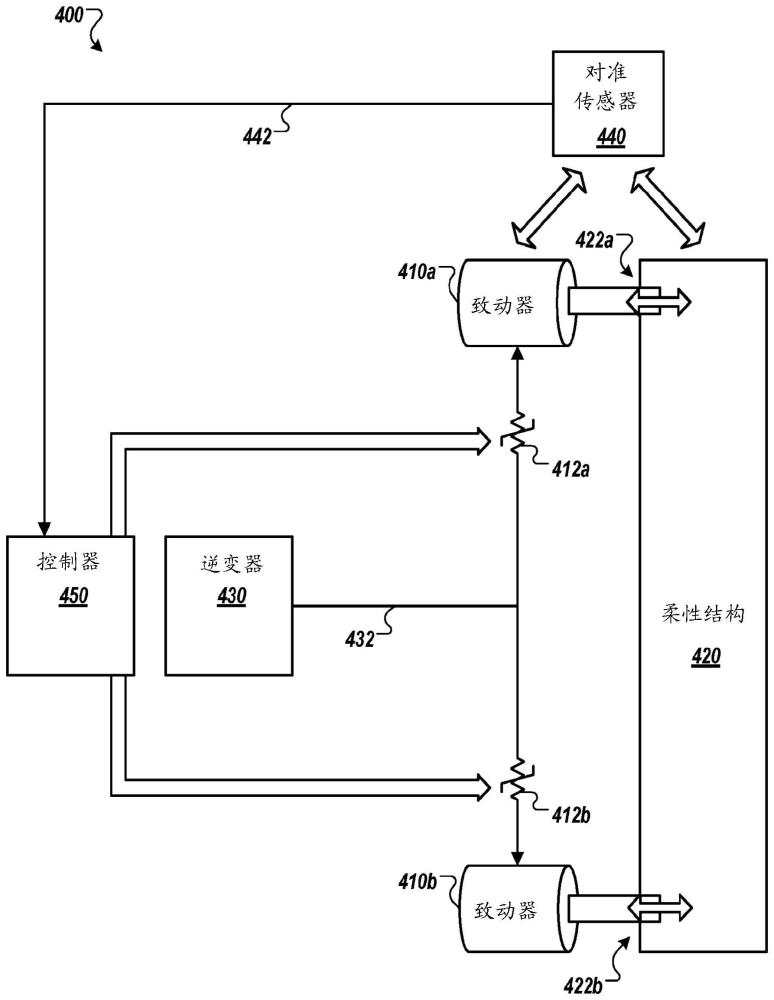
2、在第一示例中,一种系统包括:柔性结构;功率逆变器;第一机电设备,被配置为基于从功率逆变器接收的功率促使柔性结构的第一部分移动;第二机电设备,被配置为基于从功率逆变器接收的功率促使柔性结构的第二部分移动;反馈传感器,被配置为提供指示第一部分和第二部分之间的对准的反馈信号;以及控制器,被配置为基于反馈信号来控制第一机电设备和第二机电设备中的至少一个的操作。
3、在第二示例中,根据示例1,控制器被配置为修改第一机电设备或第二机电设备中的至少一个的在线阻抗(in-line impedance)。
4、在第三示例中,根据示例1或2,控制器被配置为相对于第二机电设备的第二定子绕组或第二转子绕组的第二有效阻抗来修改第一机电设备的第一定子绕组或第一转子绕组的第一有效阻抗。
5、在第四示例中,根据示例1至3中的任何一个,第一机电设备或第二机电设备中的至少一个是电感应马达。
6、在第五示例中,根据示例1至4中的任何一个,第一机电设备通过柔性结构机械地链接到第二机电设备。
7、在第六示例中,根据示例1至5中的任何一个,柔性结构是飞行器涡轮引擎反推器致动系统的平移整流罩。
8、在第七示例中,根据示例1至6中的任何一个,反馈传感器被配置为确定第一机电设备的第一定位输出、第一速度、第一扭矩或第一线圈电流中的一个或多个,以及第二机电设备的第二定位输出、第二速度、第二扭矩或第二线圈电流中的一个或多个。
9、在第八示例中,根据示例1至7中的任何一个,反馈传感器被配置为确定第一机电设备和第二机电设备之间的定位差、速度差、扭矩差或线圈电流差中的一个或多个。
10、在第九示例中,根据示例1至8中的任何一个,反馈传感器被配置为测量柔性结构的结构应力。
11、在第十示例中,根据示例1至9中的任何一个,控制器被配置为执行第一机电设备或第二机电设备中的至少一个的定位控制、速度控制、扭矩控制或功率控制中的一个或多个。
12、在第十一示例中,一种致动的方法包括:由功率逆变器促使第一机电设备移动;由第一机电设备促使柔性结构的第一部分移动;由功率逆变器促使第二机电设备移动;由第二机电设备促使柔性结构的第二部分移动;标识第一部分和第二部分之间的对准;以及基于所标识的对准来控制第一机电设备或第二机电设备中的至少一个的操作。
13、在第十二示例中,根据示例11,控制第一机电设备或第二机电设备中的至少一个的操作包括修改第一机电设备或第二机电设备中的至少一个的在线阻抗。
14、在第十三示例中,根据示例11或12,控制第一机电设备或第二机电设备中的至少一个的操作包括相对于第二机电设备的第二定子绕组或第二转子绕组的第二有效阻抗来修改第一机电设备的第一定子绕组或第一转子绕组的第一有效阻抗。
15、在第十四示例中,根据示例11至13中的任何一个,第一机电设备或第二机电设备中的至少一个是电感应马达。
16、在第十五示例中,根据示例11至14中的任何一个,第一机电设备通过柔性结构机械地链接到第二机电设备。
17、在第十六示例中,根据示例11至15中的任何一个,柔性结构是飞行器涡轮引擎反推器致动系统的平移整流罩。
18、在第十七示例中,根据示例11至16中的任何一个,标识第一部分和第二部分之间的对准包括测量第一机电设备的第一定位输出、第一速度、第一扭矩或第一线圈电流中的一个或多个,以及第二机电设备的第二定位输出、第二速度、第二扭矩或第二线圈电流中的一个或多个。
19、在第十八示例中,根据示例11至17中的任何一个,标识第一部分和第二部分之间的对准包括标识第一机电设备和第二机电设备之间的定位差、速度差、扭矩差或线圈电流差中的一个或多个。
20、在第十九示例中,根据示例11至18中的任何一个,标识第一部分和第二部分之间的对准包括测量柔性结构的结构应力。
21、在第二十示例中,根据示例11至19中的任何一个,控制第一机电设备和第二机电设备中的至少一个的操作包括执行第一机电设备或第二机电设备中的至少一个的定位控制、速度控制、扭矩控制或功率控制中的一个或多个。
22、在第二十一示例中,一种涡轮风扇引擎组件包括:涡轮风扇引擎;机舱,围绕涡轮风扇引擎并且限定穿过涡轮风扇引擎的环形旁通管道以限定通常前到后的旁通气流路径;以及反推器,包括:柔性元件,可移动到反向定位和从所述反向定位可移动,在所述反向定位处,旁通气流的至少一部分被反向;功率逆变器;第一机电设备,被配置为基于从功率逆变器接收的功率促使柔性元件的第一部分移动;第二机电设备,被配置为基于从功率逆变器接收的功率促使柔性元件的第二部分移动;反馈传感器,被配置为提供指示第一部分和第二部分之间的对准的反馈信号;以及控制器,被配置为基于反馈信号来控制第一机电设备和第二机电设备中的至少一个的操作。
23、在第二十二示例中,根据示例21,控制器被配置为修改第一机电设备或第二机电设备中的至少一个的在线阻抗。
24、在一个示例实施例中,一种系统,包括:柔性结构;功率逆变器;第一机电设备,被配置为基于从功率逆变器接收的功率促使柔性结构的第一部分移动;第二机电设备,被配置为基于从功率逆变器接收的功率促使柔性结构的第二部分移动;反馈传感器,被配置为提供指示第一部分和第二部分之间的对准的反馈信号;以及控制器,被配置为基于反馈信号来控制第一机电设备和第二机电设备中的至少一个的操作。
25、各种实施例可以包括以下特征中的一些、全部或者不包括以下特征。控制器可以被配置为修改第一机电设备或第二机电设备中的至少一个的在线阻抗。控制器可以被配置为相对于第二机电设备的第二定子绕组或第二转子绕组的第二有效阻抗来修改第一机电设备的第一定子绕组或第一转子绕组的第一有效阻抗。第一机电设备或第二机电设备中的至少一个可以是电感应马达。第一机电设备可以通过柔性结构机械地链接到第二机电设备。柔性结构可以是飞行器涡轮引擎反推器致动系统的平移整流罩。反馈传感器可以被配置为确定第一机电设备的第一定位输出、第一速度、第一扭矩或第一线圈电流中的一个或多个,以及第二机电设备的第二定位输出、第二速度、第二扭矩或第二线圈电流中的一个或多个。反馈传感器可以被配置为确定第一机电设备和第二机电设备之间的定位差、速度差、扭矩差或线圈电流差中的一个或多个。反馈传感器可以被配置为测量柔性结构的结构应力。控制器可以被配置为执行第一机电设备或第二机电设备中的至少一个的定位控制、速度控制、扭矩控制或功率控制中的一个或多个。
26、在示例实现中,一种致动的方法包括:由功率逆变器促使第一机电设备移动;由第一机电设备促使柔性结构的第一部分移动;由功率逆变器促使第二机电设备移动;由第二机电设备促使柔性结构的第二部分移动;标识第一部分和第二部分之间的对准;以及基于所标识的对准来控制第一机电设备或第二机电设备中的至少一个的操作。
27、各种实现可以包括以下特征中的一些、全部或不包括以下特征。控制第一机电设备或第二机电设备中的至少一个的操作可以包括修改第一机电设备或第二机电设备中的至少一个的在线阻抗。控制第一机电设备或第二机电设备中的至少一个的操作可以包括相对于第二机电设备的第二定子绕组或第二转子绕组的第二有效阻抗来修改第一机电设备的第一定子绕组或第一转子绕组的第一有效阻抗。第一机电设备或第二机电设备中的至少一个可以是电感应马达。第一机电设备可以通过柔性结构机械地链接到第二机电设备。柔性结构可以是飞行器涡轮引擎反推器致动系统的平移整流罩。标识第一部分和第二部分之间的对准可以包括测量第一机电设备的第一定位输出、第一速度、第一扭矩或第一线圈电流中的一个或多个,以及第二机电设备的第二定位输出、第二速度、第二扭矩或第二线圈电流中的一个或多个。标识第一部分和第二部分之间的对准可以包括标识第一机电设备和第二机电设备之间的定位差、速度差、扭矩差或线圈电流差中的一个或多个。标识第一部分和第二部分之间的对准可以包括测量柔性结构的结构应力。控制第一机电设备和第二机电设备中的至少一个的操作可以包括执行第一机电设备或第二机电设备中的至少一个的定位控制、速度控制、扭矩控制或功率控制中的一个或多个。
28、在另一示例实施例中,一种涡轮风扇引擎组件包括:涡轮风扇引擎;机舱,围绕涡轮风扇引擎并且限定穿过涡轮风扇引擎的环形旁通管道以限定通常前到后的旁通气流路径;以及反推器,包括:柔性元件,可移动到反向定位和从所述反向定位可移动,在所述反向定位处,旁通气流的至少一部分被反向;功率逆变器;第一机电设备,被配置为基于从功率逆变器接收的功率促使柔性元件的第一部分移动;第二机电设备,被配置为基于从功率逆变器接收的功率促使柔性元件的第二部分移动;反馈传感器,被配置为提供指示第一部分和第二部分之间的对准的反馈信号;以及控制器,被配置为基于反馈信号来控制第一机电设备和第二机电设备中的至少一个的操作。
29、各种实施例可以包括以下特征中的一些、全部或者不包括以下特征。控制器可以被配置为修改第一机电设备或第二机电设备中的至少一个的在线阻抗。
30、这里描述的系统和技术可以提供以下优点中的一个或多个。首先,系统可以提供被配置为移动单个输出的多个设备的同步。第二,系统可以维持由共享功率逆变器驱动的多个电致动器的同步和/或对准。第三,由系统提供的同步可以使得能够在反推器致动器系统中使用更轻、更薄、更柔韧的材料。
31、在附图和以下描述中阐述了一个或多个实现的细节。其他特征和优点将是从所述描述和附图中以及从权利要求书中显而易见的。
- 还没有人留言评论。精彩留言会获得点赞!