基于双目立体视觉的风力发电机塔架健康监测方法及装置
本技术涉及发电机监测,特别是涉及一种基于双目立体视觉的风力发电机塔架健康监测方法及装置。
背景技术:
1、风能是一种重要清洁能源。由于叶片长度的增加,叶片的柔性会增加;同时在极端的工作环境中,风力发电机会受到复杂的非定常气动载荷作用,因此在运行过程中会出现塔架晃动、倾斜,叶片扫塔等事故。对风力发电机塔架健康进行监测,对塔架晃动和倾斜,以及叶片扫塔等进行预警,可以提前规避严重的事故,具有非常重要的工程意义。
2、光学传感器常被用于监测风力发电机塔架运行的健康状态,包括单目相机、双目相机、激光雷达等传感器。目前常用的使用光学传感器的风电塔架健康监测方法在便捷性和成本控制方面仍有不足,且难以通过一种方法同时对塔架的倾斜、晃动、叶片扫塔进行监测预警。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够降低设备损耗和成本的基于双目立体视觉的风力发电机塔架健康监测方法、装置、计算机设备和存储介质。
2、一种基于双目立体视觉的风力发电机塔架健康监测方法,所述方法包括:
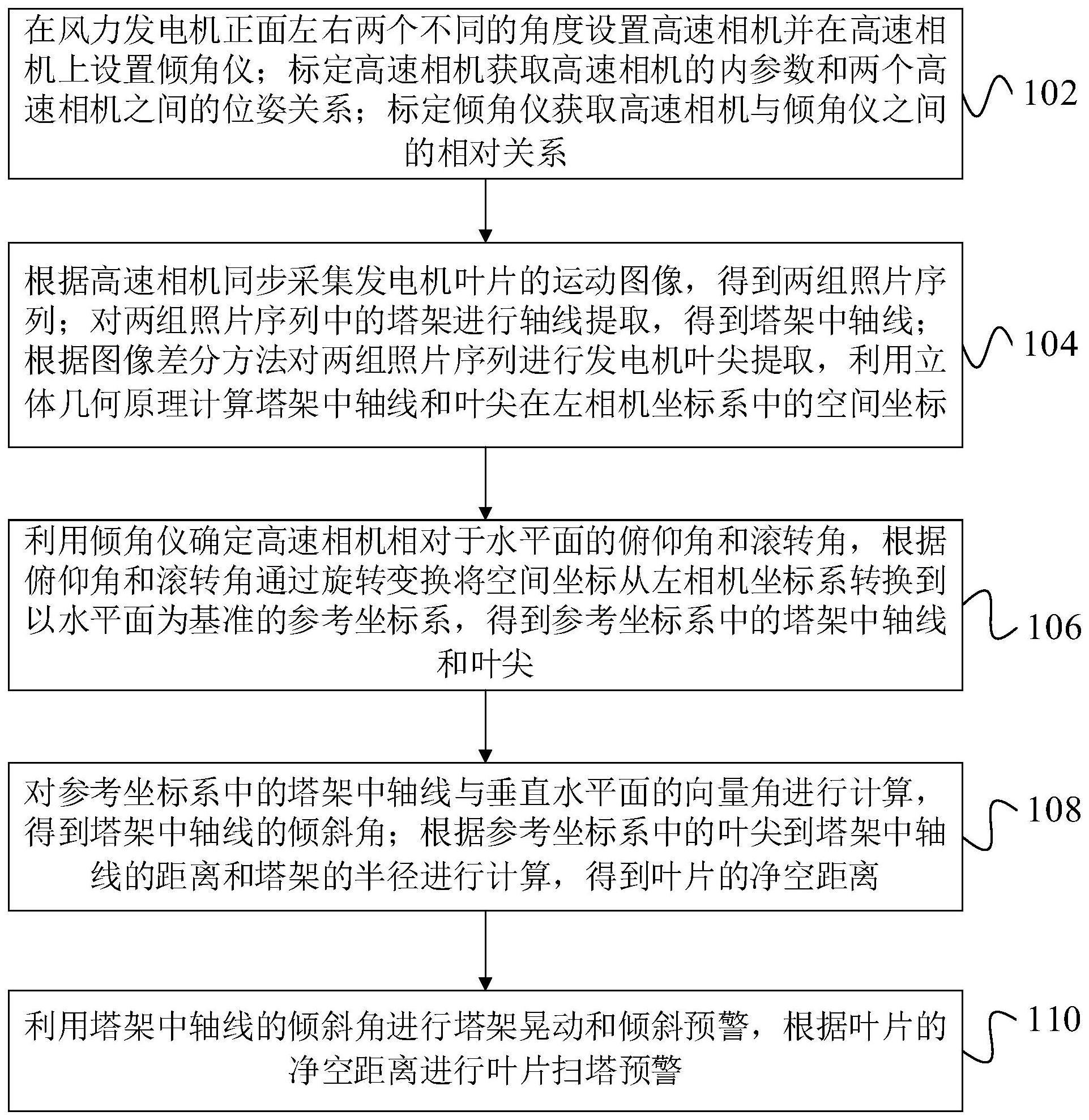
3、在风力发电机正面左右两个不同的角度设置高速相机并在高速相机上设置倾角仪;标定高速相机获取高速相机的内参数和两个高速相机之间的位姿关系;标定倾角仪获取高速相机与倾角仪之间的相对关系;
4、根据高速相机同步采集发电机叶片的运动图像,得到两组照片序列;
5、对两组照片序列中的塔架进行轴线提取,得到塔架中轴线;
6、根据图像差分方法对两组照片序列进行发电机叶尖提取,利用立体几何原理计算塔架中轴线和叶尖在左相机坐标系中的空间坐标;
7、利用倾角仪确定高速相机相对于水平面的俯仰角和滚转角,根据俯仰角和滚转角通过旋转变换将空间坐标从左相机坐标系转换到以水平面为基准的参考坐标系,得到参考坐标系中的塔架中轴线和叶尖;
8、对参考坐标系中的塔架中轴线与垂直水平面的向量角进行计算,得到塔架中轴线的倾斜角;
9、根据参考坐标系中的叶尖到塔架中轴线的距离和塔架的半径进行计算,得到叶片的净空距离;
10、利用塔架中轴线的倾斜角进行塔架晃动和倾斜预警,根据叶片的净空距离进行叶片扫塔预警。
11、在其中一个实施例中,对两组照片序列中的塔架进行轴线提取,得到塔架中轴线,包括:利用照片序列的图像中塔架边缘与背景之间存在明显的灰度差异,使用边缘检测算法检测出塔架的左右边缘,提取左右边缘连续的中点作为塔架中心候选点,从塔架中心候选点钟剔除偏差大的点,将剩下的塔架候选点进行拟合,得到塔架中轴线。
12、在其中一个实施例中,根据图像差分方法对两组照片序列进行发电机叶尖提取,包括:
13、根据图像差分的方法将照片序列中当前帧与前、后一帧照片相减,凸显出叶片的转动,抑制静止的背景信息并剔除背景微弱扰动目标分割出叶片;
14、利用叶片分割结果提取叶尖精确位置坐标。
15、在其中一个实施例中,利用立体几何原理计算塔架中轴线和叶尖在左相机坐标系中的空间坐标,包括:
16、设置塔架轴线在左右相机成像平面上的投影分别为l1和l2,则相机光心和图像上投影的直线段分别确定两个平面,两平面的交线为空间直线,设(x,y,z)表示物点的世界坐标,(u1,v1)和(u2,v2)分别是左、右图像帧上像点的理想图像坐标,a1,b1,c1是左成像平面上直线方程的系数,a2,b2,c2是右成像平面上直线方程的系数,左、右相机拍摄图片上的直线方程分别表示为
17、a1u1+b1v1+c1=0
18、a2u2+b2v2+c2=0
19、设a1,b1,c1,d1是光心和l1形成平面方程的系数,是a2,b2,c2,d2光心和l2形成平面方程的系数,则对应的空间平面方程分别表示为:
20、a1x+b1y+c1z+d1=0
21、a2x+b2y+c2z+d2=0
22、将两像直线确定的两个共面方程联立得到塔架中轴线的方程为:
23、
24、根据线性成像模型计算得到叶尖在左相机坐标系中的空间坐标。
25、在其中一个实施例中,根据俯仰角和滚转角通过旋转变换将空间坐标从左相机坐标系转换到以水平面为基准的参考坐标系,得到参考坐标系中的塔架中轴线和叶尖,包括:
26、根据俯仰角和滚转角通过旋转变换将空间坐标从左相机坐标系转换到以水平面为基准的参考坐标系,得到参考坐标系中的塔架中轴线l′和叶尖q′为
27、l'=rθ·rφ·ri·l
28、q'=rθ·rφ·ri·q
29、其中,θ表示俯仰角,φ表示滚转角,rθ和rφ分别为俯仰角和滚转角确定的旋转矩阵,ri表示是左相机坐标系到倾角仪坐标系的旋转矩阵。
30、在其中一个实施例中,对参考坐标系中的塔架中轴线与垂直水平面的向量角进行计算,得到塔架中轴线的倾斜角,包括:
31、对参考坐标系中的塔架中轴线与垂直水平面的向量角进行计算,得到塔架中轴线的倾斜角为
32、
33、其中,参考坐标系中的塔架中轴线l′的方向向量为垂直向下的方向向量为n=(0,1,0)。
34、在其中一个实施例中,根据参考坐标系中的叶尖到塔架中轴线的距离和塔架的半径进行计算,得到叶片的净空距离,包括:
35、根据参考坐标系中的叶尖到塔架中轴线的距离和塔架的半径进行计算,得到叶片的净空距离为x=d-r,其中,d为叶尖到塔架中轴线的距离,r为塔架的半径。
36、一种基于双目立体视觉的风力发电机塔架健康监测装置,所述装置包括:
37、图像采集装备设置模块,用于在风力发电机正面左右两个不同的角度设置高速相机并在高速相机上设置倾角仪;标定高速相机获取高速相机的内参数和两个高速相机之间的位姿关系;标定倾角仪获取高速相机与倾角仪之间的相对关系;
38、轴线和叶尖提取模块,用于根据高速相机同步采集发电机叶片的运动图像,得到两组照片序列;对两组照片序列中的塔架进行轴线提取,得到塔架中轴线;根据图像差分方法对两组照片序列进行发电机叶尖提取,利用立体几何原理计算塔架中轴线和叶尖在左相机坐标系中的空间坐标;
39、旋转变换模块,用于利用倾角仪确定高速相机相对于水平面的俯仰角和滚转角,根据俯仰角和滚转角通过旋转变换将空间坐标从左相机坐标系转换到以水平面为基准的参考坐标系,得到参考坐标系中的塔架中轴线和叶尖;
40、监测指标计算模块,用于对参考坐标系中的塔架中轴线与垂直水平面的向量角进行计算,得到塔架中轴线的倾斜角;根据参考坐标系中的叶尖到塔架中轴线的距离和塔架的半径进行计算,得到叶片的净空距离;
41、监测模块,用于利用塔架中轴线的倾斜角进行塔架晃动和倾斜预警,根据叶片的净空距离进行叶片扫塔预警。
42、上述基于双目立体视觉的风力发电机塔架健康监测方法及装置,本技术通过在风力发电机正面左右两个不同的角度设置高速相机并在高速相机上设置倾角仪,根据高速相机大视场角下采集风力发电机的全局运动图像,然后基于无标记的全局序列图像提取叶片和塔架中轴线固有特征,再根据双目立体视觉原理确定叶尖和塔架中轴线在左相机坐标系中的相对位置,通过倾角仪确定相机在水平面确定的参考坐标系中的姿态角,通过旋转变换进一步计算塔架中轴线在参考坐标系中的倾斜角及角度的变化,实现塔架倾斜和晃动的预警,通过计算叶片的净空距离,实现风电叶片扫塔的预警。本方法具有实时预警、流程简单便捷、降低设备损耗,成本低廉等优点,可广泛应用于风力发电机塔架健康监测。
- 还没有人留言评论。精彩留言会获得点赞!