一种水轮机调速器的导叶动态特性的控制方法及系统与流程
本公开属于水电厂自动控制,尤其涉及一种水轮机调速器的导叶动态特性的控制方法及系统。
背景技术:
1、对于水电站而言,为保证水轮发电机组在全工况下安全可靠运行,水电站设计阶段必须进行调节保证计算。调节保证计算为水轮发电机组选择合理的导叶关闭规律,进而避免极端工况下机组与电网突然解列,由于压力和转速的剧烈突变而造成的压力钢管爆破或转速失控等恶性事故发生。
2、调节保证计算重点关注及综合考虑大波动过渡过程中的安全条件包括:如何降低机组的最大转速上升率,并满足合同要求;如何增加机组蜗壳进口中心线压力最大值的安全余量;如何降低尾水管进口真空度;如何减小机组抬机量等。
3、在首先保证机组导叶安全关闭的前提条件下,导致相当多数的水轮机组导叶的关闭速度可达到其开启速度的1倍甚至更快。造成水轮机导叶系统开启和关闭过程呈现出强列的非线性特性。
4、由于存在这种截然不同的动态特性,造成水轮发电机组转速和功率调节的动态特性也存在较大差异。而传统水轮机调速器系统大多采用pid(proportion integrationdifferentiation)控制方式。由于pid调节器的线性时不变特点,在面对导叶系统的这种强非线性特性时,很难取得较好的调节效果。在机组小波动过程易造成转速或功率调节指标下降,在大波动过渡过程中甚至会引起机组逆变灭磁或转速失稳,进而影响机组安全稳定运行。
技术实现思路
1、本公开旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本公开提供了一种水轮机调速器的导叶动态特性的控制方法及系统,主要目的在于解决由导叶开启关闭动态特性引起的转速、功率调节品质变差的问题。
2、根据本公开的第一方面实施例,提供了一种水轮机调速器的导叶动态特性的控制方法,水轮机系统包括发电机调速器、pid调节器、控制参数生成设备和控制参数采集设备,所述控制参数采集设备用于采集所述发电机调速器的控制参数实际值,所述控制参数生成设备用于输出控制参数目标值,所述pid调节器用于基于所述控制参数目标值和所述控制参数实际值输出动态特性调节参数,所述控制方法包括:
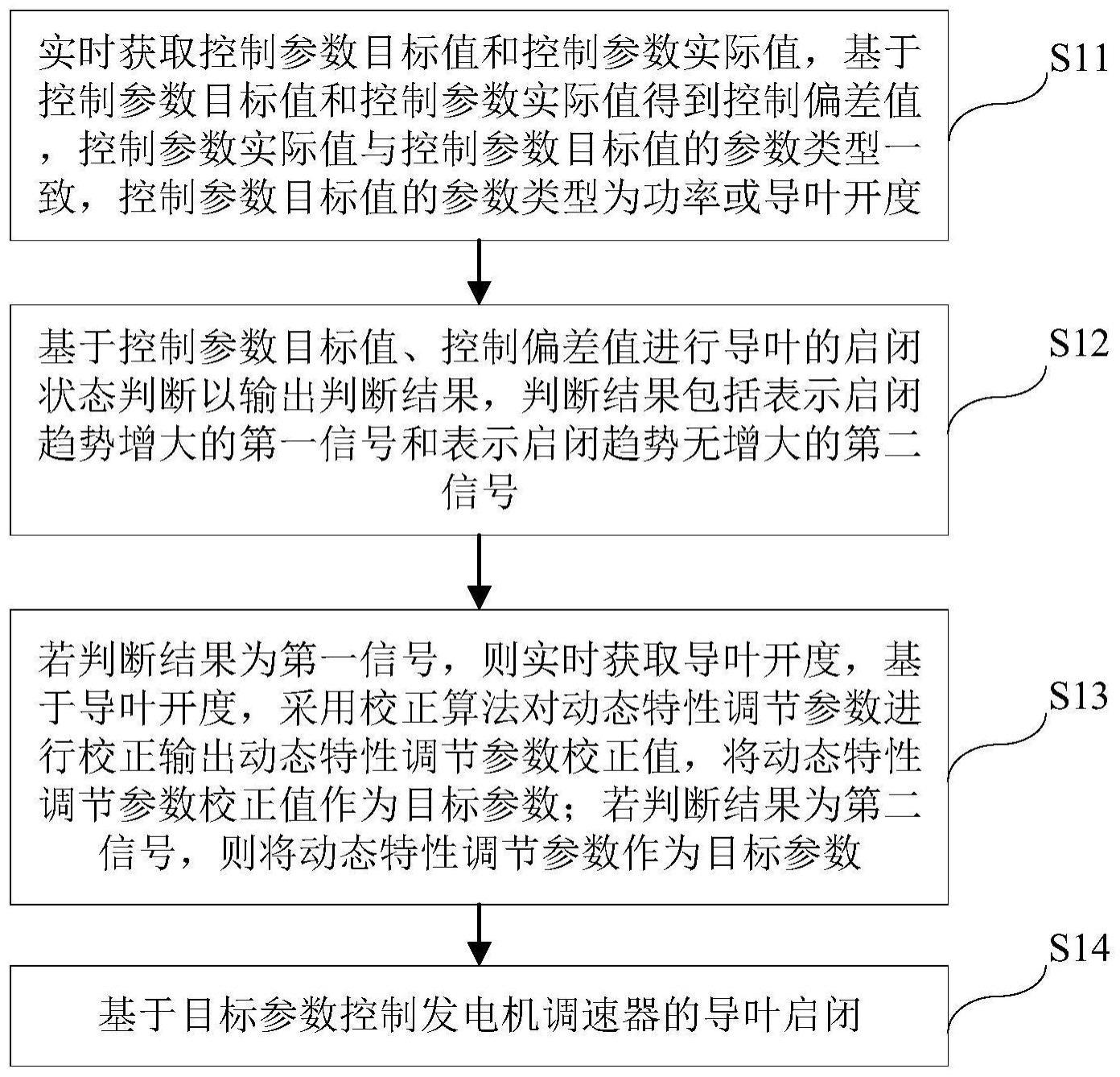
3、实时获取所述控制参数目标值和所述控制参数实际值,基于所述控制参数目标值和所述控制参数实际值得到控制偏差值,所述控制参数实际值与所述控制参数目标值的参数类型一致,所述控制参数目标值的参数类型为功率或导叶开度;
4、基于所述控制参数目标值、所述控制偏差值进行导叶的启闭状态判断以输出判断结果,所述判断结果包括表示启闭趋势增大的第一信号和表示启闭趋势无增大的第二信号;
5、若所述判断结果为所述第一信号,则实时获取导叶开度,基于所述导叶开度,采用校正算法对所述动态特性调节参数进行校正输出动态特性调节参数校正值,将所述动态特性调节参数校正值作为目标参数;若所述判断结果为所述第二信号,则将所述动态特性调节参数作为目标参数;
6、基于所述目标参数控制所述发电机调速器的导叶启闭。
7、在本公开的一个实施例中,所述基于所述控制参数目标值、所述控制偏差值进行导叶的启闭状态判断以输出判断结果,包括:监测所述控制参数目标值是否更新,若是,则基于新的控制参数目标值与更新前的控制参数目标值的差值进行导叶的启闭状态判断。
8、在本公开的一个实施例中,所述基于所述控制参数目标值、所述控制偏差值进行导叶的启闭状态判断以输出判断结果,还包括:若没有更新,则基于所述控制偏差值获得偏差n阶导,n为非零自然数,基于所述控制偏差值、所述偏差n阶导进行导叶的启闭状态判断。
9、在本公开的一个实施例中,所述校正算法为变阶数惯性校正算法。
10、在本公开的一个实施例中,所述基于所述导叶开度,采用校正算法对所述动态特性调节参数进行校正输出动态特性调节参数校正值,包括:基于所述导叶开度计算导叶开启速率和导叶关闭速率;基于所述导叶开启速率和所述导叶关闭速率获得误差系数;若误差系数小于等于设定误差阈值,则利用所述校正算法对所述动态特性调节参数进行校正;若误差系数大于设定误差阈值,则优化所述校正算法的校正参数,然后利用校正后的校正算法对所述动态特性调节参数进行校正。
11、根据本公开的第二方面实施例,还提供了一种水轮机调速器的导叶动态特性的控制系统,水轮机系统包括发电机调速器、pid调节器、控制参数生成设备和控制参数采集设备,所述控制参数采集设备用于采集所述发电机调速器的控制参数实际值,所述控制参数生成设备用于输出控制参数目标值,所述pid调节器用于基于所述控制参数目标值和所述控制参数实际值输出动态特性调节参数,所述控制系统包括:
12、计算模块,用于实时获取所述控制参数目标值和所述控制参数实际值,基于所述控制参数目标值和所述控制参数实际值得到控制偏差值,所述控制参数实际值与所述控制参数目标值的参数类型一致,所述控制参数目标值的参数类型为功率或导叶开度;
13、启闭状态判断模块,用于基于所述控制参数目标值、所述控制偏差值进行导叶的启闭状态判断以输出判断结果,所述判断结果包括表示启闭趋势增大的第一信号和表示启闭趋势无增大的第二信号;
14、校正选择模块,用于若所述判断结果为所述第一信号,则实时获取导叶开度,基于所述导叶开度,采用校正算法对所述动态特性调节参数进行校正输出动态特性调节参数校正值,将所述动态特性调节参数校正值作为目标参数;若所述判断结果为所述第二信号,则将所述动态特性调节参数作为目标参数;
15、控制模块,用于基于所述目标参数控制所述发电机调速器的导叶启闭。
16、在本公开的一个实施例中,所述启闭状态判断模块,具有用于:监测所述控制参数目标值是否更新,若是,则基于新的控制参数目标值与更新前的控制参数目标值的差值进行导叶的启闭状态判断;若没有更新,则基于所述控制偏差值获得偏差n阶导,n为非零自然数,基于所述控制偏差值、所述偏差n阶导进行导叶的启闭状态判断。
17、在本公开的一个实施例中,所述校正算法为变阶数惯性校正算法。
18、在本公开的一个实施例中,所述校正选择模块,具体用于:基于所述导叶开度计算导叶开启速率和导叶关闭速率;基于所述导叶开启速率和所述导叶关闭速率获得误差系数;若误差系数小于等于设定误差阈值,则利用所述校正算法对所述动态特性调节参数进行校正;若误差系数大于设定误差阈值,则优化所述校正算法的校正参数,然后利用校正后的校正算法对所述动态特性调节参数进行校正。
19、根据本公开的第三方面实施例,还提供了一种水轮机调速器的导叶动态特性的控制设备,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行本公开的第一方面实施例提出的水轮机调速器的导叶动态特性的控制方法。
20、在本公开一个或多个实施例中,水轮机系统包括发电机调速器、pid调节器、控制参数生成设备和控制参数采集设备,控制参数采集设备用于采集发电机调速器的控制参数实际值,控制参数生成设备用于输出控制参数目标值,pid调节器用于基于控制参数目标值和控制参数实际值输出动态特性调节参数,控制方法包括:实时获取控制参数目标值和控制参数实际值,基于控制参数目标值和控制参数实际值得到控制偏差值,控制参数实际值与控制参数目标值的参数类型一致,控制参数目标值的参数类型为功率或导叶开度;基于控制参数目标值、控制偏差值进行导叶的启闭状态判断以输出判断结果,判断结果包括表示启闭趋势增大的第一信号和表示启闭趋势无增大的第二信号;若判断结果为第一信号,则实时获取导叶开度,基于导叶开度,采用校正算法对动态特性调节参数进行校正输出动态特性调节参数校正值,将动态特性调节参数校正值作为目标参数;若判断结果为第二信号,则将动态特性调节参数作为目标参数;基于目标参数控制发电机调速器的导叶启闭。在这种情况下,基于控制参数目标值和控制参数实际值得到控制偏差值,基于控制参数目标值、控制偏差值进行导叶的启闭状态判断以输出判断结果,对于启闭趋势增大的,采用校正算法对动态特性调节参数进行校正输出动态特性调节参数校正值,然后利用动态特性调节参数校正值控制发电机调速器的导叶启闭。相对于现有直接利用pid调节器输出的动态特性调节参数控制发电机调速器的导叶启闭,克服了传统pid调节器由于时不变特性而较难适应非线性系统控制的问题,解决了由导叶开启关闭动态特性引起的转速、功率调节品质变差的问题。
21、本公开附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本公开的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!