一种发动机凸轮极限目标相位控制方法及装置与流程
本发明涉及发动机控制领域,特别是涉及一种发动机凸轮极限目标相位控制方法及装置。
背景技术:
1、研究表明,发动机凸轮系统在全负荷工况对动力性和部分负荷工况对燃油经济性均有极大的优势。在发动机凸轮控制激活后,如果发动机凸轮相位过小,发动机凸轮控制电磁阀电流也会变小,容易造成发动机凸轮实际相位波动,且发动机凸轮相位与锁止位置接近,机油压力也容易出现波动,同样可能使发动机凸轮实际相位波动。
2、有鉴于此,一件申请号为“cn202011247319.6”、发明名称为“一种目标发动机凸轮相位的计算方法与系统”的发明,根据发动机转速和负荷确定基础目标发动机凸轮相位;根据特殊工况获取对应的修正率;根据基础目标发动机凸轮相位和各修正率确定初始目标发动机凸轮相位;根据发动机凸轮激活状态条件判断发动机凸轮是否激活;根据判断结果划分发动机凸轮状态,确定最终目标发动机凸轮相位。该发明从节气门开度、歧管压差以及最小点火角进行初始目标发动机凸轮相位计算,能够准确计算目标发动机凸轮相位,并且引入发动机凸轮控制激活条件,对最终目标发动机凸轮相位进行二次修正。虽然该发明根据点火角情况调节发动机凸轮相位的变化,但是并未考虑发动机凸轮极限相位的设计方法。
3、而另一件申请号为“cn202110717601.4”、发明名称为“发动机基本点火效率的计算方法、计算机设备及存储介质”的发明,对发动机基本点火效率进行基于气量的学习更新。但是同样的是,该方案也并未考虑发动机凸轮相位的设计方法。
4、因此,有必要引入发动机凸轮最小目标相位的控制,作为发动机凸轮激活时的最小目标相位,避免造成发动机凸轮实际相位波动而出现气量波动,以致造成动力性不稳和排放控制恶化。
技术实现思路
1、本发明的目的是为了克服上述背景技术的不足,提供一种发动机凸轮极限目标相位控制方法及装置,使其在凸轮目标相位低于最终凸轮最小相位时,关闭凸轮控制系统,即不允许凸轮激活,作为凸轮目标相位设定时的最小限值,避免了在凸轮目标设定过程中因出现目标设定过小而导致的动力性和排放问题。
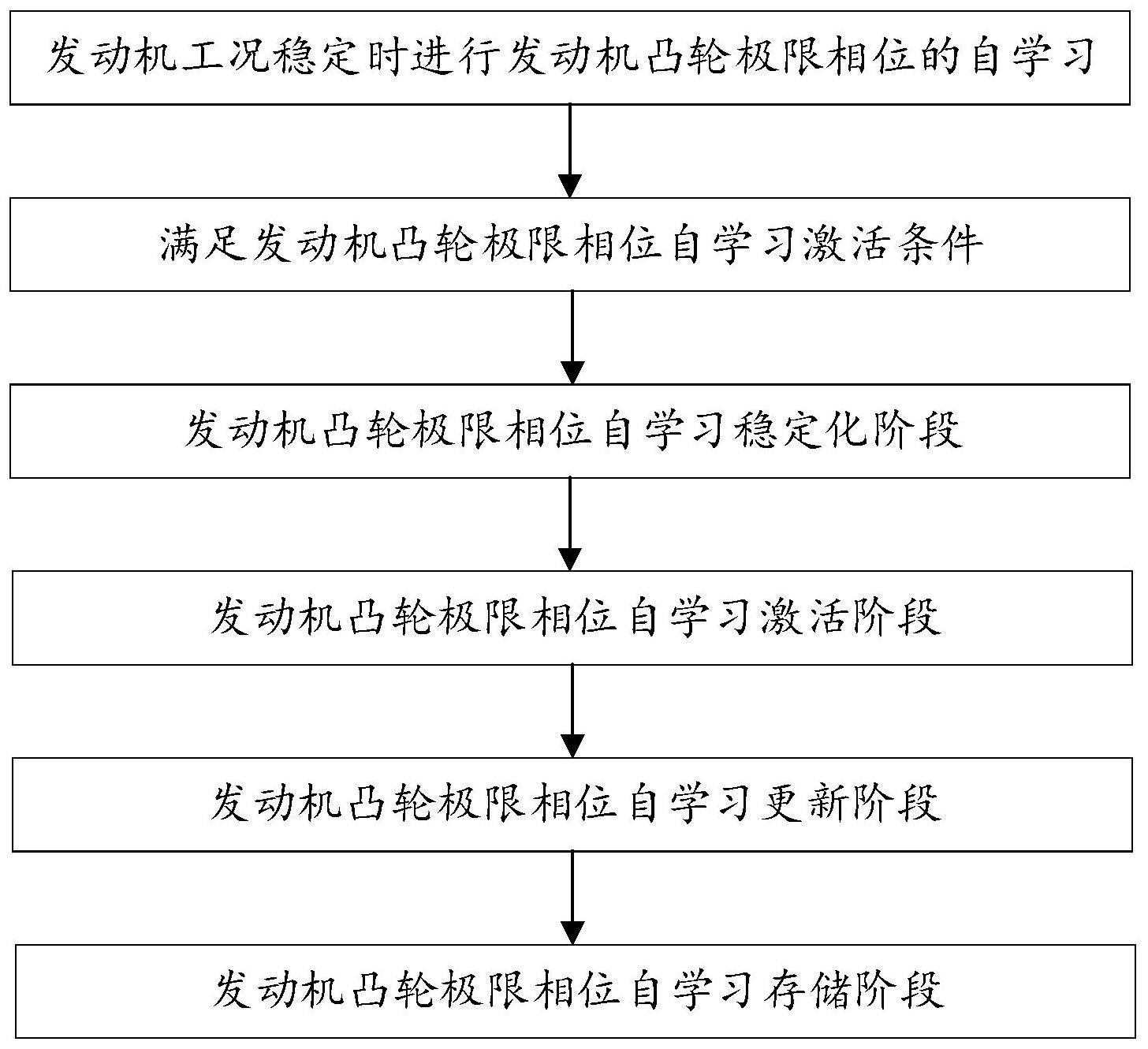
2、本发明提供的一种发动机凸轮极限目标相位控制方法,实质是对发动机凸轮极限相位进行自学习更新,其包括如下过程:在发动机工况稳定的时候进行发动机凸轮极限相位的自学习,在满足发动机凸轮极限相位自学习激活条件的前提下,依次进入发动机凸轮极限相位自学习稳定化阶段、发动机凸轮极限相位自学习激活阶段、发动机凸轮极限相位自学习更新阶段和发动机凸轮极限相位自学习存储阶段,将每一个工况下的凸轮最小相位学习值rvvtminadapt均存储在eeprom中并修正,得到最终发动机凸轮极限相位phivvtminfinal。
3、在上述技术方案中,所述发动机凸轮极限相位自学习更新中,发动机凸轮极限相位自学习的激活条件如下:发动机运行时间:发动机处于运行状态,且发动机运行时间超过发动机预设时间;闭环控制:凸轮系统处于闭环控制激活状态;目标相位:凸轮目标相位phivvtdsrd固定不变;预设相位差:当前凸轮目标相位phivvtdsrd与凸轮最小相位之差不超过预设范围;碳罐:碳罐未开启;空调大灯:空调、大灯均未开启;气缸进气密度:目标进入气缸新鲜空气进气密度在一定范围内,且进入凸轮最小相位的自学习的目标进入气缸新鲜空气进气密度波动较小;发动机水温波动:发动机水温在一定范围内,且进入凸轮最小相位的自学习的发动机水温波动较小;进气温度波动:进气温度在一定范围内,且进入凸轮最小相位的自学习的进气温度波动较小;机油温度波动:机油温度在一定范围内,且进入凸轮最小相位的自学习的机油温度波动较小;机油压力波动:机油压力在一定范围内,且进入凸轮最小相位的自学习的机油压力波动较小;发动机转速闭环控制:发动机转速进入闭环控制;发动机目标转速波动:发动机目标转速在一定范围内,且进入凸轮最小相位的自学习的发动机目标转速波动较小;发动机请求火路扭矩波动:发动机请求火路扭矩波动较小;曲轴强制通风开闭状态:曲轴强制通风功能开闭状态不变化;爆震:未出现爆震;早燃:未出现早燃;进气密度波动:目标进入气缸新鲜空气进气密度波动小;在以上激活条件满足时,则进入凸轮最小相位的自学习稳定化阶段;凸轮最小相位自学习稳定化阶段的具体过程如下:第一预设时间t0判断:判断进入凸轮最小相位自学习稳定化阶段是否超过第一预设时间t0;第二预设时间t1判断:判断凸轮最小相位的自学习未更新时间间隔是否超过第二预设时间t1;维持当前阶段:当第一预设时间t0判断和第二预设时间t1判断的条件未满足,但激活条件满足时,则维持在凸轮最小相位自学习稳定化阶段;返回前一阶段:如果第一预设时间t0判断和第二预设时间t1判断的条件不满足,且激活条件未满足,则重新判断是否满足发动机凸轮极限相位自学习激活条件;进入下一阶段:如果第一预设时间t0判断和第二预设时间t1判断的条件满足,且激活条件满足,则进入凸轮最小相位自学习激活阶段。
4、在上述技术方案中,所述发动机凸轮极限相位自学习更新中,凸轮最小相位自学习激活阶段的具体过程如下:在进入凸轮最小相位的自学习激活阶段时,在累计时间t2内累计计算发动机转速总和、进气温度总和、水温总和、机油温度总和、机油压力总和、目标进入气缸新鲜空气进气密度总和、实际进入气缸新鲜空气进气密度总和、目标发动机转速ndsrd总和、实际发动机转速滤波nactfilter值总和、发动机实际点火效率总和、高压电池soc累加量、凸轮目标相位总和、凸轮实际相位总和,在累计时间t2满足后,则进入凸轮最小相位自学习更新阶段;其中,实际发动机转速滤波nactfilter值计算方法如下:nactfilter(n)=krho×[nactraw(n)-nactfilter(n-1)]+nactfilter(n-1),其中,nactraw为实际发动机转速原始值,nactraw(n)为第n个采样周期的实际发动机转速原始值,nactfilter为一阶低通滤波后的实际发动机转速滤波值,nactfilter(n)为第n个采样周期的实际发动机转速滤波值,nactfilter(n-1)为第n-1个采样周期的实际发动机转速滤波值,n=1,2,3…,nactfilter(0)为刚刚进入自学习激活阶段时刻的实际发动机转速原始值nactraw(0),krho为发动机转速滤波系数。
5、在上述技术方案中,所述发动机凸轮极限相位自学习更新中,凸轮最小相位自学习更新阶段的具体过程如下:将进气温度、水温、机油温度、机油压力、发动机目标转速、目标进入气缸新鲜空气进气密度、凸轮目标相位与自学习激活阶段的累计时间t2内累计计算值相同时,设定为相同工况;将每一个工况下的凸轮最小相位学习系数rvvtminadapt均存储在eeprom中。
6、在上述技术方案中,所述发动机凸轮极限相位自学习更新中,凸轮最小相位自学习存储阶段的具体过程如下:平均值计算:计算在进入凸轮最小相位自学习阶段内累计时间t2段的进气温度平均值、水温平均值、机油温度平均值、机油压力平均值、发动机目标转速平均值ndsrdavg、实际发动机转速滤波值平均值nactfilteravg、目标进入气缸新鲜空气进气密度平均值rhodsrdavg、实际进入气缸新鲜空气进气密度平均值rhorawavg、发动机实际点火效率平均值rsprkeffavg、高压电池soc变化速率dsoc、凸轮目标相位平均值phivvtdsrdavg、凸轮实际相位平均值phivvtactavg;工况更新:将平均进气温度更新到对应的进气温度工况、将平均水温更新到对应的水温工况、将平均机油温度更新到对应的机油温度工况、将平均机油压力更新到对应的机油压力工况、将平均发动机目标转速更新到对应的发动机目标转速工况、将目标进入气缸新鲜空气进气密度的学习值更新到对应的目标进入气缸新鲜空气进气密度工况、将凸轮目标相位工况下的凸轮最小相位学习值更新到对应的凸轮目标相位工况,并将各个更新值储存到eeprom中。
7、在上述技术方案中,所述发动机凸轮极限相位自学习更新中,凸轮最小相位自学习存储阶段的工况更新步骤的具体过程如下:凸轮最小相位学习值rvvtminadapt的修正方法:控制策略:一旦c1过大,则说明气量控制波动较大,则需要提高凸轮最小相位,此时相位过小而控制不稳定;一旦c1过小,即偏差小于设计标准,则说明气量控制波动极小,则可以降低凸轮最小相位,提高凸轮使用工况范围,充分使用凸轮的燃油经济性优势;一旦c2过大,则说明转速控制波动较大,则需要提高凸轮最小相位,此时相位过小而控制不稳定;一旦c2过小,即偏差小于设计标准,则说明转速控制波动极小,则可以降低凸轮最小相位,提高凸轮使用工况范围,充分使用凸轮的燃油经济性优势;一旦c3过大,则说明凸轮相位控制波动较大,则需要提高凸轮最小相位,此时相位过小而控制不稳定;一旦c3过小,即偏差小于设计标准,则说明凸轮相位控制波动极小,则可以降低凸轮最小相位,提高凸轮使用工况范围,充分使用凸轮的燃油经济性优势。
8、在上述技术方案中,所述发动机凸轮极限相位自学习更新中,凸轮最小相位自学习存储阶段的工况更新步骤的控制策略的具体过程如下:凸轮相位主动学习:如果c1大于3%,且c2大于2.5%,且c3大于2%时,判断发动机凸轮极限相位自学习更新的激活条件中除了目标相位和预设相位差以外的其他条件后,需要提高凸轮极限相位工况;如果c1小于1%,且c2小于0.5%,且c3小于0.5%时,判断发动机凸轮极限相位自学习更新的激活条件中除了目标相位和预设相位差以外的其他条件后,需要降低凸轮极限相位工况;除了前两种的其他情况下,最小凸轮相位学习值rvvtminadapt维持不变;凸轮极限相位更新:每次学习条件满足后只进行降低凸轮极限相位工况或提高凸轮极限相位工况,且只更新一次凸轮极限相位phivvtadaptraw,车辆每次驾驶循环中只更新一次凸轮极限相位phivvtadaptraw;凸轮极限相位学习值:学习后的凸轮极限相位phivvtminadapt:其中为上一次学习到的凸轮极限相位,其首次默认值为默认下凸轮极限相位,kfactor为加权系数;eeprom存储工况:最终学习到的发动机凸轮极限相位学习值phivvtadapt存储到eeprom的相应工况里;最终发动机凸轮极限相位值:则最终的发动机凸轮极限相位phivvtminfinal=kfinal×phivvtmin+(1-kfinal)×phivvtminadapt,其中,kfinal为滤波系数,phivvtmin为默认下凸轮极限相位。
9、在上述技术方案中,所述凸轮最小相位自学习存储阶段的工况更新步骤的控制策略的凸轮相位主动学习步骤中,提高凸轮极限相位工况的具体过程如下:设定第一凸轮目标相位:phivvtdsrdup1=phivvtdsrdavg×[1+k(ndsrdavg,c1×c2×c3)],并稳定在第一稳定时间t3内,其中phivvtdsrdavg和ndsrdavg分别为累计时间t2内获取的凸轮目标相位平均值和发动机目标转速平均值;分情况提高凸轮极限相位工况:1)如果,c1大于3%,且c2大于2.5%,且c3大于2%仍然满足,且以下两个条件均不满足:条件一:t3内发动机点火效率平均值小于t2内发动机点火效率平均值;条件二:t3内高压电池soc速率不小于t2内高压电池soc速率,则进一步提高凸轮极限相位,设定第一凸轮目标相位:将phivvtdsrdup1×[1+k1×k(ndsrdavg,c1×c2×c3)]作为本次学习到的凸轮极限相位phivvtadaptraw;2)如果,c1大于3%,且c2大于2.5%,且c3大于2%仍然满足,且以下两个条件均满足:条件一:t3内发动机点火效率平均值小于t2内发动机点火效率平均值;条件二:t3内高压电池soc速率不小于t2内高压电池soc速率,则提高凸轮极限相位,设定第一凸轮目标相位:将phivvtdsrdup1×[1+k2×k(ndsrdavg,c1×c2×c3)]作为本次学习到的凸轮极限相位phivvtadaptraw;3)如果,c1大于3%,c2大于2.5%,c3大于2%三者均不满足,且以下两个条件均不满足:条件一:t3内发动机点火效率平均值小于t2内发动机点火效率平均值;条件二:t3内高压电池soc速率不小于t2内高压电池soc速率,则提高凸轮极限相位,设定第一凸轮目标相位:将phivvtdsrdup1×[1+k3×k(ndsrdavg,c1×c2×c3)]作为本次学习到的凸轮极限相位phivvtadaptraw;4)如果,c1大于3%,c2大于2.5%,c3大于2%三者均不满足,且以下两个条件均满足:条件一:t3内发动机点火效率平均值小于t2内发动机点火效率平均值;条件二:t3内高压电池soc速率不小于t2内高压电池soc速率,则提高凸轮极限相位,设定第一凸轮目标相位:将phivvtdsrdup1×[1+k4×k(ndsrdavg,c1×c2×c3)]作为本次学习到的凸轮极限相位phivvtadaptraw;5)其他情况下,将phivvtdsrdup1×k5作为本次学习到的凸轮极限相位phivvtadaptraw。
10、在上述技术方案中,所述凸轮最小相位自学习存储阶段的工况更新步骤的控制策略的凸轮相位主动学习步骤中,降低凸轮极限相位工况的具体过程如下:设定第二凸轮目标相位:设定凸轮目标相位为0并稳定在第二稳定时间t4,记录t4时间内的发动机点火效率平均值和高压电池soc速率,结束后再次设定第二凸轮目标相位:phivvtdsrddn1=phivvtdsrdavg×[1-k(ndsrdavg,c1×c2×c3)],并稳定在第三稳定时间t5,其中phivvtdsrdavg和ndsrdavg分别为累计时间t2内获取的凸轮目标相位平均值和发动机目标转速平均值;分情况降低凸轮极限相位工况:1)如果c1小于1%,且c2小于0.5%,且c3小于0.5%时仍然满足,且以下两个条件均不满足:条件一:t5内发动机点火效率平均值小于t4内发动机点火效率平均值;条件二:t5内高压电池soc速率不小于t4内高压电池soc速率,则进一步降低凸轮极限相位,设定第二凸轮目标相位:将phivvtdsrddn1×[1-k6×k(ndsrdavg,c1×c2×c3)]作为本次学习到的凸轮极限相位phivvtadaptraw;2)如果c1小于1%,且c2小于0.5%,且c3小于0.5%仍然满足(,且以下两个条件均满足:条件一:t5内发动机点火效率平均值小于t4内发动机点火效率平均值;条件二:t5内动力电池soc平均值不小于t4内动力电池平均值,则降低凸轮极限相位,设定第二凸轮目标相位:将phivvtdsrddn1×[1-k7×k(ndsrdavg,c1×c2×c3)]作为本次学习到的凸轮极限相位phivvtadaptraw;3)如果c1小于1%,且c2小于0.5%,且c3小于0.5%三者均不满足,且以下两个条件均不满足:条件一:t5内发动机点火效率平均值小于t4内发动机点火效率平均值;条件二:t5内动力电池soc平均值不小于t4内动力电池平均值,则降低凸轮极限相位,设定第二凸轮目标相位:将phivvtdsrddn1作为本次学习到的凸轮极限相位phivvtadaptraw;4)如果c1小于1%,且c2小于0.5%,且c3小于0.5%三者均不满足,且以下两个条件均满足:条件一:t5内发动机点火效率平均值小于t4内发动机点火效率平均值;条件二:t5内动力电池soc平均值不小于t4内动力电池平均值,则降低凸轮极限相位,设定第二凸轮目标相位:将phivvtdsrdup1×[1-k8×k(ndsrdavg,c1×c2×c3)]作为本次学习到的凸轮极限相位phivvtadaptraw;5)其他情况下,将phivvtdsrdup1×k9作为本次学习到的凸轮极限相位phivvtadaptraw。
11、本发明还提供了一种发动机凸轮极限目标相位控制装置,具有计算机程序,该计算机程序能够执行发动机凸轮极限目标相位控制方法。
12、本发明发动机凸轮极限目标相位控制方法及装置,具有以下有益效果:
13、在不影响发动机正常运行的前提下,不管是发动机制造差异,还是发动机生命周期的差异,主动调控参数的方式下均可以对发动机凸轮极限相位进行自学习,从积极快速改善燃油经济性的角度设计,且不影响排放的前提下,同时改善了凸轮控制系统的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!