一种大惯量发动机无位置传感器起动控制方法与流程
本发明属于电机控制,具体涉及一种大惯量发动机无位置传感器起动控制方法。
背景技术:
1、永磁同步电机具有功率密度高、动态响应快、损耗小等诸多优点,被广泛应用于新能源电动汽车、航空航天等领域。
2、然而,在航空航天发动机大惯量系统中,为减小系统体积以及节约成本,其驱动电机通常不加装位置传感器。由于在零低转速时信噪比较低,且电机的反电动势很小,再加上死区和变频器非线性的影响,根据电机数学模型获取电机转子位置及转速信息的模型法失效,难以满足高可靠性起动的实际需求。为此,通常使用高频信号注入法、i/f起动等实现永磁同步电机的起动。然而,高频信号注入法实现较复杂,对计算资源要求高,且三相电流处理需要额外的低通滤波器硬件支持,高频信号的注入也容易产生抖振,高频时硬件损耗也较高。另一方面,采用传统i/f起动控制方法时,由于发动机负载惯量较大,再加上初始位置辨识不准确时会导致起动过程中电机转速剧烈振动,最终导致电机失步,起动失败;此外,发动机通常工作在较为复杂的环境,其系统很容易受到强扰动,此时由于传统i/f起动控制工作在转速开环,其转子位置未知,系统阻尼仅由摩擦产生,因此极易引发震荡,系统稳定性受到严重影响,甚至带来安全性问题。
3、公开号为cn116743011a的中国专利公开了一种永磁同步电机无位置传感器i/f控制方法,具体步骤为:给电机施加固定方向的电流矢量,使转子在电磁转矩作用下旋转到预定位置,设定为i/f控制的初始转子位置;根据电机参数和起动过程中设定的电流频率确定起动电流幅值;引入观测器观测转子角度,定义功角δ为i/f控制给定电角度和观测器观测的电角度之差,计算电机功角,根据功角和差角的关系确定差角;根据功角的信息,采取线性回归确定电机稳定状态的目标功角;根据稳定状态的目标功角和实际功角对电机进行电流矢量频率闭环补偿;根据稳定状态下的差角,对电流矢量幅值进行反馈闭环控制;该专利虽然能够克服开环起动控制效果差和观测器低速时观测精度不足的缺陷,提升了系统的稳定性,但该篇专利存在以下问题:1)未进行初始位置辩识,而是采用预定位直接进行i/f起动,这样在某些特殊场合起动成功率不高,且会有较大的脉动;2)通过功角差进行补偿,而功角的计算采用线性回归得到,计算和实现过程较为复杂;3)该专利仅为i/f起动控制,未进行基于反电势观测的双闭环控制,使其应用场景有限。
技术实现思路
1、为解决上述技术问题,本发明提供了一种大惯量发动机无位置传感器起动控制方法。
2、本发明通过以下技术方案得以实现。
3、本发明提供的一种大惯量发动机无位置传感器起动控制方法,包括以下步骤:
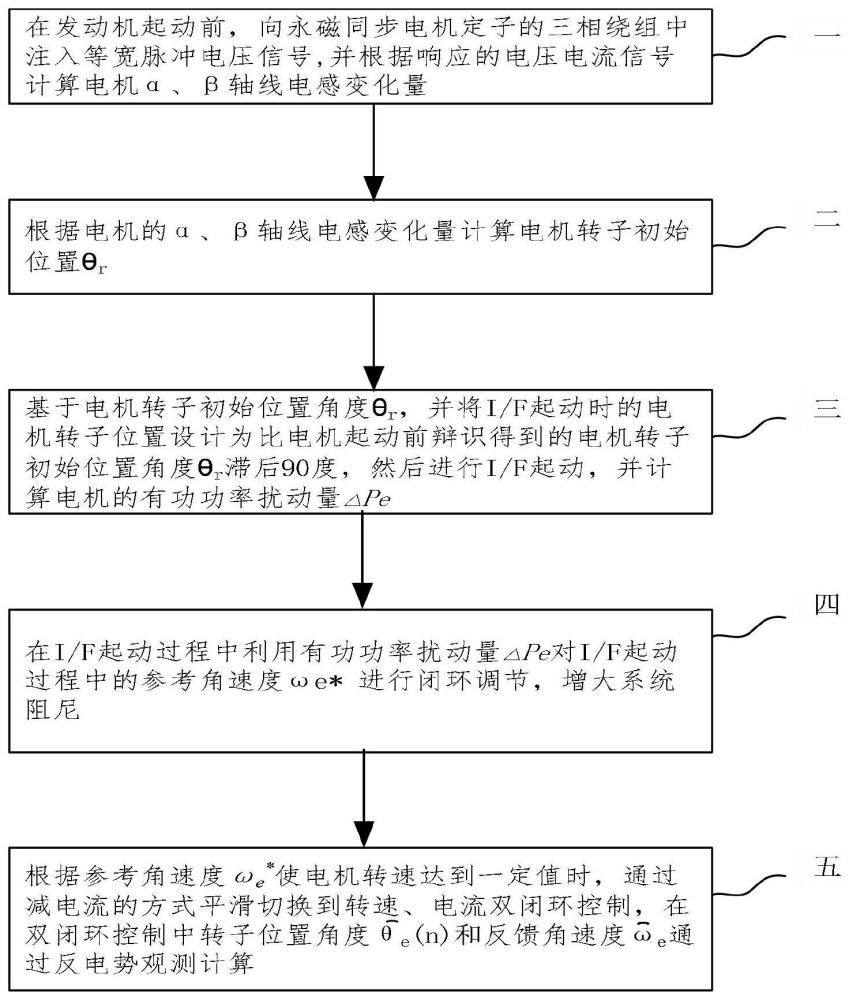
4、步骤1:在发动机起动前,向永磁同步电机定子的三相绕组中注入等宽脉冲电压信号,并根据响应的电压电流信号计算电机α、β轴线电感变化量;
5、步骤2:根据电机α、β轴线电感变化量计算电机转子初始位置θr;
6、步骤3:基于电机转子初始位置角度θr,并将i/f起动时的电机转子位置设置为比辩识得到的转子初始位置角度θr滞后90度,然后进行i/f起动,并计算电机的有功功率扰动量δpe;
7、步骤4:在i/f起动过程中利用有功功率扰动量δpe对i/f起动过程中的参考角速度ωe*进行闭环调节,增大系统阻尼;
8、步骤5:调节参考角速度ωe*使电机转速达到一定值时,通过减电流的方式切换到转速、电流双闭环控制,在双闭环控制中转子位置角度和反馈角速度通过反电势观测计算。
9、定义永磁同步电机定子的三相绕组分别为a相绕组、b相绕组、c相绕组,其特征在于,所述步骤1包括以下步骤:
10、步骤101:断开c相绕组,向ab相绕组中注入一个等宽脉冲电压信号,通过a/d采样电路采集a相电流,计算线电感lab,线电感lab的表达式如下:
11、
12、式中:δuab为ab相绕组之间的线电压变化量,δt为采样时间,δiab为ab相绕组之间的线电流变化量;
13、步骤102:断开a相绕组,向cb相绕组中注入一个等宽脉冲电压信号,通过a/d采样电路采集c相电流,计算线电感lcb,线电感lcb的表达式如下:
14、
15、式中:δucb为cb相绕组之间的线电压变化量,δicb为cb相绕组之间的线电流变化量;
16、步骤103:断开b相绕组,向ca相绕组中注入一个等宽脉冲电压信号,通过a/d采样电路采集c相电流,计算线电感lca,线电感lca的表达式如下:
17、
18、式中:δuca为ca相绕组之间的线电压变化量,δica为ca相绕组之间的线电流变化量;
19、步骤104:断开c相绕组,向ba相绕组中注入一个等宽脉冲电压信号,通过a/d采样电路采集b相电流,计算线电感lba,线电感lba的表达式如下:
20、
21、式中:δuba为ba相绕组之间的线电压变化量,δiba为ba相绕组之间的线电流变化量;
22、步骤105:断开a相绕组,向bc相绕组中注入一个等宽脉冲电压信号,通过a/d采样电路采集b相电流,计算线电感lbc,线电感lbc的表达式如下:
23、
24、式中:δubc为bc相绕组之间的线电压变化量,δibc为bc相绕组之间的线电流变化量;
25、步骤106:断开b相绕组,向ac相绕组中注入一个等宽脉冲电压信号,通过a/d采样电路采集a相电流,计算线电感lac,线电感lac的表达式如下:
26、
27、式中:δuac为ac相绕组之间的线电压变化量,δiac为ac相绕组之间的线电流变化量;
28、步骤107:由式(1)至式(6)可得ab相、bc相、ca相的线电感变化量,分别为:
29、δlab=lba-lab (7)
30、δlbc=lcb-lbc (8)
31、δlca=lac-lca (9)
32、式中:δlab为ab相绕组之间的线电感变化量,δlbc为bc绕组之间的线电感变化量,δlca为ca相绕组之间的线电感变化量;
33、步骤108:根据式(7)至式(9)可得电机α、β轴线电感变化量为:
34、
35、式中:δlα为电机α轴线电感变化量,δlβ为电机β轴线电感变化量。
36、所述步骤2中,根据式(10)得到电机转子初始位置角度θr为:
37、
38、所述步骤3的具体步骤为:
39、步骤301:给定参考角速度ωe*;
40、步骤302:根据坐标系变换关系,将i/f起动控制时的电机转子位置设置为比辨识得到的电机转子初始位置θr滞后90度;
41、步骤303:根据电机参数和系统带宽设计电流环、转速环的pi控制参数;
42、步骤304:通过a/d采样电路采集电机的三相电流信号ia、ib、ic、和三相电压信号ua、ub、uc;
43、步骤305:通过clarke变换得到α轴电压信号uα和电流信号iα,β轴电压信号uβ和电流信号iβ,iα、iβ再通过park变换得到d轴、q轴电流信号id、iq;
44、步骤306:计算电机有功功率扰动量δpe,其表达式为:
45、
46、所述步骤5中减电流的方式为不断改变i/f控制的角度,使之与通过反电势观测的转子位置角度之间的角度差不断减小,从而实现平滑切换,避免切换过程中的抖动。
47、所述步骤5中通过反电势观测获得电机转子位置和反馈角速度的具体计算过程为:
48、建立电机在α-β坐标系的数学模型为:
49、
50、其中:
51、
52、式中:rs为电机定子电阻,ls为电机定子电感,eα,eβ分别为电机的反电动势在α-β轴的分量,ψf为电机永磁体磁链,θe为电机转子的位置角度。
53、由(13)式,可得电机反电势为:
54、
55、将式(15)进行离散化后可得:
56、
57、式中:ts为采样周期,eα(n)、eβ(n)分别为第n时刻α、β轴反电势的离散值,uα(n)、uβ(n)分别为第n时刻α、β轴电压的离散值,iα(n)、iβ(n)分别为第n时刻α、β轴电流的离散值,iα(n-1)、iβ(n-1)分别为第(n-1)时刻α、β轴电流的离散值,n为采样时刻;
58、根据式(16)可得离散域的电机转子位置角度为:
59、
60、由式(17)可得电机的反馈角速度为:
61、
62、式中:为第(n-1)时刻电机转子位置角度。
63、本发明的有益效果在于:
64、本发明结合基于等脉宽信号注入的转子初始位置辨识、增加有功功率补偿的改进i/f起动控制以及基于反电势观测的无位置传感器控制三种有效措施,实现了永磁同步电机带大惯量发动机的平稳、快速起动,控制方法实施简单,所需调整参数少,且起动过程中电机转子不会出现严重反转现象,起动成功率高,可靠性较强。此外,由于增加有功功率补偿,由改进i/f控制切换到结合转子位置观测的转速电流双闭环控制阶段时较平稳,大大减小了传统切换过程当中的过冲,提高开环切闭环的安全可靠性。
- 还没有人留言评论。精彩留言会获得点赞!