一种液体火箭七发动机摆动布局方法和控制方法与流程
本发明涉及飞行器控制,尤其涉及一种液体火箭七发动机摆动布局方法和控制方法。
背景技术:
1、传统的液体火箭发动机布局方案,一般采取对称布局的方式,其中以单发动机、双发动机、四发动机、五发动机、九发动机并联最为常见。这是因为火箭控制系统设计时,一般希望俯仰通道和偏航通道特性一致,否则两通道控制能力不一致,且控制系统设计与算法实现较为复杂,故发动机布局多采用对称形式。
2、中国专利文献cn115310211a“垂直起降重复使用运载火箭总体设计方法和装置”虽然公开了一种运载火箭七台发动机的布局方案,即中心部署1台发动机,剩余6台发动机均布于中心发动机外周,但是该专利文献并没有公开在中心发动机外周布设的6台发动机在火箭上的具体布设位置,也没有公开七台发动机如何并联摆动实现火箭姿态控制的方法。
技术实现思路
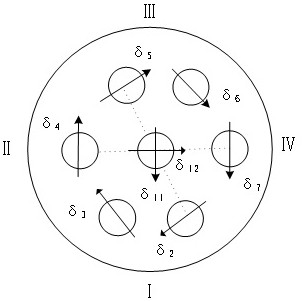
1、本发明的目的在于提供一种液体火箭七发动机摆动布局方法和控制方法,以解决上述背景技术中提出的问题。为实现上述目的,本发明一方面提供一种液体火箭七发动机摆动布局方法,包括:将七个发动机分别编号为1号至7号发动机,1号发动机布设在火箭中心,从火箭尾部向前看2号至7号发动机按顺时针方向依编号顺序均布于所述1号发动机的外周,其中4号发动机布设在火箭的ⅱ象限线上,所述2号至7号发动机的相邻发动机的中心与所述火箭中心的连线之间的夹角为60°且每个发动机中心与火箭中心距离相同。
2、优选地,所述1号发动机在垂直方向和水平方向双向摆动,所述垂直方向为火箭的ⅰ象限线和ⅲ象限线连线所在方向,所述水平方向为火箭的ⅱ象限线和ⅳ象限线连线所在方向,所述2号至7号发动机摆动方向垂直于各自发动机中心与所述火箭中心连线。
3、优选地,所述1号发动机安装有两个伺服机构分别用于控制所述1号发动机在垂直方向和水平方向摆动,所述2号至7号发动机各安装有一个伺服机构分别用于控制各自发动机摆动,所述1号至7号发动机的控制为相互独立的。
4、优选地,所述1号至7号发动机结构均相同,提供的推力大小均相同。
5、本发明另一方面提供一种液体火箭七发动机控制方法,包括:将七个发动机分别编号为1号至7号发动机,1号发动机布设在火箭中心,从火箭尾部向前看2号至7号发动机按顺时针方向依编号顺序均布于所述1号发动机的外周,其中4号发动机布设在火箭的ⅱ象限线上,所述2号至7号发动机的相邻发动机的中心与所述火箭中心的连线之间的夹角为60°且每个发动机中心与火箭中心距离相同;1号发动机在垂直方向和水平方向双向摆动,所述垂直方向为火箭的ⅰ象限线和ⅲ象限线连线所在方向,所述1号发动机在垂直方向的伺服摆角为 δ11,所述水平方向为火箭的ⅱ象限线和ⅳ象限线连线所在方向,所述1号发动机在水平方向的伺服摆角为 δ12;所述2号至7号发动机摆动方向垂直于各自发动机中心与所述火箭中心连线,各自的伺服摆角为 δ n(n=2,3,4,5,6,7);根据全箭所需控制力矩计算对应的俯仰摆角 δ φ、偏航摆角 δ ψ和滚转摆角 δ γ;根据俯仰摆角 δ φ、偏航摆角 δ ψ和滚转摆角 δ γ计算所述1号发动机在垂直方向的伺服摆角 δ11和在水平方向的伺服摆角 δ12以及所述2号至7号发动机各自的伺服摆角 δ n;根据伺服摆角 δ11和伺服摆角 δ12控制所述1号发动机,根据伺服摆角 δ n控制对应的发动机。
6、优选地,所述1号发动机在垂直方向的伺服摆角 δ11和在水平方向的伺服摆角 δ12以及所述2号至7号发动机各自的伺服摆角 δ n采用如下公式确定:
7、
8、优选地,根据全箭所需控制力矩计算对应的俯仰摆角 δ φ、偏航摆角 δ ψ和滚转摆角 δ γ采用如下公式确定:
9、
10、其中, m xc 、m yc 、m zc 分别为绕箭体x、y、z轴的控制力矩, p为所述1号至7号发动机的总推力, l r为俯仰、偏航控制力臂, z r为滚转控制力臂。
11、优选地,所述1号至7号发动机结构均相同,提供的推力大小均相同。
12、优选地,所述1号发动机安装有两个伺服机构分别用于控制所述1号发动机在垂直方向和水平方向摆动,所述2号至7号发动机各安装有一个伺服机构分别用于控制各自发动机摆动,所述1号至7号发动机的控制为相互独立的。
13、优选地,从火箭尾部向前看,所述1号发动机沿火箭的ⅰ象限线向火箭的ⅲ象限线摆动时所述伺服摆角 δ11为正,所述1号发动机沿火箭的ⅱ象限线向火箭的ⅳ象限线摆动时所述伺服摆角 δ12为正,所述2号至7号发动机在火箭尾部周向上呈顺时针方向摆动时各自的所述伺服摆角 δ n为正。
14、本发明具有如下技术效果:(1)本发明采用七发动机并联的布局,并通过中心发动机双向摆动加周向发动机单向摆动,实现俯仰、偏航、滚转的三通道姿态控制,使得控制能力更强、控制计算更加可靠;(2)本发明相比于两个发动机、四个发动机等对称形式布局,俯仰、偏航通道控制能力不一样,本发明可适应工况更复杂的飞行;(3)本发明通过中心发动机双向伺服摆动控制加周向发动机单向伺服摆动控制,既能够获得较大的控制力和力矩,有利于飞行控制,又能节省伺服机构的套数,且结构更加简单、节省成本。(4)本发明通过七个发动机的摆动布局,可实现控制系统的冗余,在一个发动机或伺服机构中重度故障时依旧能通过其他发动机及伺服机构控制火箭。
- 还没有人留言评论。精彩留言会获得点赞!