重力转移驱动的游梁式节能抽油机的制作方法
1.本实用新型涉及油田领域,具体说是一种重力转移驱动的游梁式节能抽油机。
背景技术:
2.目前,在油田广泛使用的四连杆机构驱动游梁式抽油机,是由电动机通过三角皮带传动机构进行初次减速,再通过齿轮减速器进行二次减速后,驱动四连杆传动机构带动驴头上下摆动,然后通过驴头经吊绳、抽油杆带动抽油泵进行上下往复运动,实现对油液抽汲的。这种抽油机在实际使用中存在:1、三角皮带传动存在着雨雪天气皮带打滑、丢转,三角皮带经常出现松弛的现象;2、减速器功率大,常有漏油、齿轮损坏、串轴和轴承损坏等现象;3、曲柄销装置存在脱落,造成翻机现象;4、安装维修不方便、劳动强度大;5、机械能没有得到充分利用,能量损失大。由此致使故障率高,停机率高,生产时率低;安装维修不方便、劳动强度大,维修费用高;机械能没有得到充分利用,能量损失大,不节能的现象。
技术实现要素:
3.为了克服现有的游梁式抽油机故障率高、安装维修不方便、能量损失大、不节能的不足,本实用新型提供一种重力转移驱动的游梁式节能抽油机,该重力转移驱动的游梁式节能抽油机可以大幅度提高传动效率,提高能源利用率,节能,且安装方便,故障率低。
4.本实用新型的技术方案是:一种重力转移驱动的游梁式节能抽油机,包括支架,支架上通过中央轴承座连接游梁,所述游梁上部中央轴承座的后方固定有重力转移装置,所述重力转移装置上连接有可旋转的重力块。
5.所述重力块包括重力块a和重力块b,二者重量相同、旋转速度相同、旋转方向相反。
6.所述游梁底部连接有圆环形的制动盘,制动盘以中央轴承座的轴为圆心,所述支架上固定有制动装置,且制动装置位于制动盘两侧。
7.所述制动盘上均布有若干个制动孔,所述支架上连接有保险销,且保险销与制动盘上的制动孔相对应。
8.所述游梁前后两侧的下部分别连接有前限位器和后限位器。
9.所述游梁尾部上方固定有平衡重。
10.本实用新型具有如下有益效果:由于采取上述方案,该抽油机为无四连杆传动链抽油机,通过重力块前后来回移动驱动抽油机,实现驴头的上下往复运动,因此无四连杆传动链所带来的问题,大幅度提高了传动效率,降低了故障率;由于采用了重力转移,变阻力重力为动力重力,大幅度提高了能源利用率;由于变阻力重力为动力重力,重力转移装置上的减速机为两个同轴线且同步反向旋转的双输出轴减速机,使向下运动重力块的重力驱动向上运动的重力块,除需要克服惯性力外,重力块的上下移动不需要额外其它动力,从而大幅度提高了能源利用率。并能够根据井下工况对驴头实时所需的重力状况和悬点运动规律要求,控制智能重力转移装置随时调整重力的转移速度和位置,实现了按井下工该况要求
进行点对点的力和速度的按需供给,因此具有功率损耗小的优点,更进一步大幅度提高了能源利用率;该抽油机不仅适用于常规的冲程和冲次,更适用于长冲程和低冲次;该抽油机保留了原有底座、支架和游梁,因此还可以在原抽油机上进行改造,并且改造方便。
附图说明
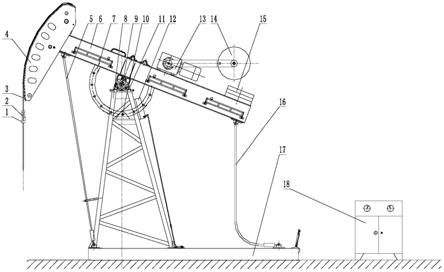
11.图1是本实用新型的主视图;
12.图2是本实用新型的俯视图;
13.图3是驴头在下止点时的示意图。
14.图中1
‑
悬绳器,2
‑
压力传感器,3
‑
吊绳,4
‑
驴头,5
‑
前限位器,6
‑
游梁,7
‑
制动盘,8
‑
支架,9
‑
编码器,10
‑
保险销,11
‑
中央轴承座,12
‑
制动装置,13
‑
重力转移装置,14
‑
重力块a,15
‑
平衡重,16
‑
后限位器,17
‑
底座,18
‑
智能控制器,19
‑
重力块b。
具体实施方式
15.下面结合附图对本实用新型作进一步说明:
16.由图1至图3所示,一种重力转移驱动的游梁式节能抽油机,包括支架8,支架8固定在底座17上,支架8上通过中央轴承座11连接游梁6,游梁6可绕中央轴承座11上的转轴转动,中央轴承座11的中间轴上设有编码器9。游梁6前端固定有驴头4,吊绳3绕过驴头4后下端连接悬绳器1,且吊绳3与悬绳器1之间设有压力传感器2。所述游梁6上部中央轴承座11的后方固定有重力转移装置13,所述重力转移装置13包括电机和重力块,所述重力块包括重力块a14和重力块b19,重力块a14和重力块b19分别通过连接杆连接在重力转移装置13的输出轴上,由电机驱动,两个重力块重量相同,均绕重力转移装置13的减速器输出轴轴线旋转,旋转速度相同、旋转方向相反。
17.所述游梁6底部连接有圆环形的制动盘7,制动盘7以中央轴承座11的轴为圆心,且制动盘7上均布有若干个制动孔。所述支架8上固定有制动装置12,制动装置12位于制动盘7两侧,其操控杆位于底座17上,扳动操控杆可以启动制动装置12,夹紧制动盘7实现抽油机制动。所述支架8上通过销座连接有保险销架,保险销架与制动盘7上的制动孔相对应,抽油机制动后,将保险销10插入保险销架相对应位置的制动孔中,使游梁保持不动。所述游梁6前后两侧的下部分别连接有前限位器5和后限位器16,前、后限位器下端均固定在底座17上。当驴头4到达上止点时,由前限位器5对其进行限位;当驴头4到达下止点时,由后限位器16对其进行限位。
18.该抽油机还包括智能控制器18,所述压力传感器2、编码器9、重力转移装置13驱动电机上的编码器均由智能控制器18控制。其中编码器9采用的是长春华特光电技术有限公司生产的型号为e1040bt的编码器,智能控制器18采用的是杭州英迈克电子有限公司生产的型号为sm20
‑
30dc
‑
orc/30的控制器,不限于上述型号,只要能实现该项控制功能的原件均可。
19.当该抽油机启动运行后,压力传感器2、编码器9和重力转移装置13驱动电机上的编码器随时向智能控制器18发出该抽油机所处于的状况信号,智能控制器18根据收到的状况信号同步控制重力转移装置13中的两个重力块的运行状态。重力块a14和重力块b19同步反向运行,即一个顺时针转动,一个逆时针转动,当两个重力块向前运行时,游梁后部对中
央轴承座11轴线力矩减少,游梁前部对中央轴承座11轴线力矩增加,在前后重力力矩差的作用下,驴头向下运动,智能控制器18根据驴头向下运动实时所需的重力状况,控制移动重力转移装置13中的重力块的移动速度和位置。当驴头到达下止点时(如图3),编码器9向智能控制器18发出信号,智能控制器18控制重力转移装置13使两个重力块同步反向向后运行,游梁前部对中央轴承座11轴线力矩减少,游梁后部对中央轴承座11轴线力矩增加,在前后重力力矩差的作用下,驴头4向上运动,驴头4到达上止点时(如图1),驴头4带动抽油泵完成一次对油液的抽汲。周而复始,实现驴头的不断上下摆动,从而带动抽油泵不断往复运动,实现对油液的连续抽汲。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1