一种全数字液压支架电液控制系统的制作方法
1.本发明涉及一种矿用综采自动化技术,尤其涉及一种全数字液压支架电液控制系统。
背景技术:
2.随着电液控制系统的推广应用,越来越多的采煤工作面采用电液控制系统替代了传统的手动控制方式。电液控制系统中,以控制器为核心,对系统中压力、红外、行程、姿态传感器所采集数据进行分析运算并发送指令,通过电磁线圈驱动器控制电磁阀的开关动作,使支架达到预定的动作。
3.现有技术:
4.电液控制系统通过驱动器将工作面所有支架互联成为一个通信网络系统,进而实现众多支架间的协调配合关联动作,也可与采煤机位置检测装置协调配合实现采煤机位置检测及以采煤机运行位置为依据的支架自动控制,还可以承担工作面区域内的其他测控任务,并具备向更上一级或其他计算机联接通信的接口和能力。
5.现有技术一的缺点:
6.目前技术中,电液控制系统多采用模拟信号或模拟+数字信号架构,同时组网方式多采用lin总线技术,构建电液控制系统通讯网络,也有控制器网络选用无线互联技术,但都存在互联形式单一、可靠性差的缺点。
7.有鉴于此,特提出本发明。
技术实现要素:
8.本发明的目的是提供了一种全数字液压支架电液控制系统,以解决现有技术中存在的上述技术问题。
9.本发明的目的是通过以下技术方案实现的:
10.本发明的全数字液压支架电液控制系统,包括全数字电液控制器及与其互连的全数字驱动器、全数字压力传感器、全数字行程传感器、全数字红外接收器、全数字姿态传感器;
11.所述全数字电液控制器负责向整个系统发送指令并对传感器采集到的数据进行分析运算,向液压支架发送动作指令,通过所述全数字驱动器接收信号并控制相应电磁先导阀的开闭,实现液压支架的相应动作,实现24项单动作与39个成组动作;
12.采用全数字架构,统一所有数据接口、统一所有数据类型、统一所有数据传输方式,系统中传感器均为数字信号输出,并通过can总线通信方式实现工作面系统的通讯。
13.与现有技术相比,本发明所提供的全数字液压支架电液控制系统,采用全数字架构,统一所有数据接口、统一所有数据类型、统一所有数据传输方式,系统中传感器均为数字信号输出,并通过can总线通信方式实现工作面系统的通讯,响应速度快,执行效率高,可靠性与稳定性更高。
附图说明
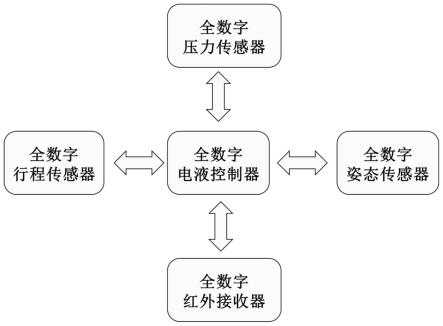
14.图1为本发明实施例提供的全数字液压支架电液控制系统结构示意图;
具体实施方式
15.下面结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述;显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,这并不构成对本发明的限制。基于本发明的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明的保护范围。
16.首先对本文中可能使用的术语进行如下说明:
17.术语“和/或”是表示两者任一或两者同时均可实现,例如,x和/或y表示既包括“x”或“y”的情况也包括“x和y”的三种情况。
18.术语“包括”、“包含”、“含有”、“具有”或其它类似语义的描述,应被解释为非排它性的包括。例如:包括某技术特征要素(如原料、组分、成分、载体、剂型、材料、尺寸、零件、部件、机构、装置、步骤、工序、方法、反应条件、加工条件、参数、算法、信号、数据、产品或制品等),应被解释为不仅包括明确列出的某技术特征要素,还可以包括未明确列出的本领域公知的其它技术特征要素。
19.术语“由
……
组成”表示排除任何未明确列出的技术特征要素。若将该术语用于权利要求中,则该术语将使权利要求成为封闭式,使其不包含除明确列出的技术特征要素以外的技术特征要素,但与其相关的常规杂质除外。如果该术语只是出现在权利要求的某子句中,那么其仅限定在该子句中明确列出的要素,其他子句中所记载的要素并不被排除在整体权利要求之外。
20.除另有明确的规定或限定外,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如:可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本文中的具体含义。
21.术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化描述,而不是明示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本文的限制。
22.本发明实施例中未作详细描述的内容属于本领域专业技术人员公知的现有技术。本发明实施例中未注明具体条件者,按照本领域常规条件或制造商建议的条件进行。本发明实施例中所用试剂或仪器未注明生产厂商者,均为可以通过市售购买获得的常规产品。
23.本发明的全数字液压支架电液控制系统,包括全数字电液控制器及与其互连的全数字驱动器、全数字压力传感器、全数字行程传感器、全数字红外接收器、全数字姿态传感器;
24.所述全数字电液控制器负责向整个系统发送指令并对传感器采集到的数据进行分析运算,向液压支架发送动作指令,通过所述全数字驱动器接收信号并控制相应电磁先
导阀的开闭,实现液压支架的相应动作,实现24项单动作与39个成组动作;
25.采用全数字架构,统一所有数据接口、统一所有数据类型、统一所有数据传输方式,系统中传感器均为数字信号输出,并通过can总线通信方式实现工作面系统的通讯。
26.所述全数字驱动器通过电缆与电液控制器相连接,背面的12路输出信号通过赫斯曼线与电磁先导阀相连,负责接收所述全数字电液控制器发出的信号,经所述全数字电液控制器完成数据处理后通过驱动器电路完成信号的输出,实现支架的相应动作。
27.所述全数字压力传感器布置于液压支架立柱位置,通过电缆与电液控制器连接,芯片通过a/d模块实时采集压力数据,负责采集液压支架在采煤工作时受到的压力值,并将压力数据通过can总线发送至所述全数字电液控制器。
28.所述全数字行程传感器布置于液压支架推移千斤顶位置,在推溜、拉架过程中实时监测液压支架位移量,使用tmr全极型磁开关传感器,利用霍尔元件作为敏感元件,根据磁栅工作原理,通过芯片产生数字编码,进行行程采集,用于实现液压支架在推溜、拉架动作时的位移量监测。
29.所述全数字红外接收器与采煤机中红外发射器相配合,识别采煤机中红外发射器的信号,通过主控芯片对接收到的信号进行分析处理,实现自动跟机过程中采煤机位置的识别;
30.利用芯片模块中a/d、d/a模块的转化,实现数字信号的输出,经can总线通信,将信号发送至所述全数字电液控制器,完成红外接收器数据接收功能,同时增加边缘抖动算法实现采煤机定位功能。
31.所述全数字姿态传感器通过实时监测液压支架高度及倾角等数据,通过can总线与所述全数字电液控制器连接,向系统提供液压支架的运动状态,获取支架的关键数据、底座和地面的相对角度、顶梁和地面的相对角度、顶梁和底座的相对角度以及支架高度。
32.工作面的每架支架均设有所述全数字电液控制器,左右邻架之间的电液控制器采用12芯架间电缆连接,多个电液控制器之间通过该电缆实现can总线连接,通过can总线通信方式实现工作面系统的通讯。
33.综上可见,本发明实施例的全数字液压支架电液控制系统,采用全数字架构,统一所有数据接口、统一所有数据类型、统一所有数据传输方式,系统中传感器均为数字信号输出,并通过can总线通信方式实现工作面系统的通讯,响应速度快,执行效率高,可靠性与稳定性更高。
34.为了更加清晰地展现出本发明所提供的技术方案及所产生的技术效果,下面以具体实施例对本发明实施例所提供的进行详细描述。
35.实施例1
36.如图1所示:
37.全数字液压支架电液控制系统,包括全数字电液控制器、全数字驱动器、全数字压力传感器、全数字行程传感器、全数字红外接收器、全数字姿态传感器、连接线缆,解决上述技术问题。
38.全数字电液控制器负责向整个系统发送指令并对传感器采集到的数据进行分析运算。使用按键向液压支架发送动作指令,通过全数字驱动器接收信号并控制相应电磁先导阀的开闭,实现液压支架的相应动作,可实现24项单动作与39个成组动作;
39.全数字驱动器负责接收控制器发出的信号,经控制器完成数据处理后通过驱动器电路完成信号的输出,实现支架的相应动作。通过电缆与电液控制器相连接,背面的12路输出信号通过赫斯曼线与电磁先导阀相连;通过驱动器完成信号的输出,执行液压支架动作的控制;
40.全数字压力传感器负责采集液压支架在采煤工作时受到的压力值,并将压力数据发送至控制器。布置于液压支架立柱位置,通过电缆与电液控制器连接,芯片通过a/d模块实时采集压力数据,并通过can总线将压力数据传送至电液控制器;
41.全数字行程传感器可实现液压支架在推溜、拉架动作时的位移量监测。布置于液压支架推移千斤顶位置,在推溜、拉架过程中实时监测液压支架位移量,使用tmr全极型磁开关传感器来替代干簧管,利用霍尔元件作为敏感元件,根据磁栅工作原理,通过芯片产生数字编码,进行行程采集;
42.全数字红外接收器与采煤机中红外发射器相配合,实现自动跟机过程中采煤机位置的识别,并反馈至控制器进行下一步的自动控制。识别采煤机中红外发射器的信号,通过主控芯片对接收到的信号进行分析处理,利用芯片模块中a/d、d/a模块的转化,实现数字信号的输出,经can总线通信,将信号发送至电液控制器,完成红外接收器数据接收功能。同时增加边缘抖动算法实现更准确地采煤机定位功能;
43.全数字姿态传感器通过实时监测液压支架高度及倾角等数据,向系统提供液压支架的运动状态。通过can总线与液压支架控制器连接,获取支架的关键数据,底座和地面的相对角度,顶梁和地面的相对角度,顶梁和底座的相对角度,以及支架高度;
44.采用can总线技术,构建了电液控制系统通讯网络,通过电缆将控制器与控制器、控制器与传感器进行连接,输出数字信号;
45.工作面的每架支架均设有电液控制器,左右邻架之间的电液控制器采用12芯架间电缆连接,多个电液控制器之间通过该电缆实现can总线连接。
46.本发明的全数字液压支架电液控制系统,采用全数字架构,统一所有数据接口、统一所有数据类型、统一所有数据传输方式,系统中传感器均为数字信号输出,并通过can总线通信方式实现工作面系统的通讯,响应速度快,执行效率高,可靠性与稳定性更高。
47.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应该以权利要求书的保护范围为准。本文背景技术部分公开的信息仅仅旨在加深对本发明的总体背景技术的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域技术人员所公知的现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1