一种高扭矩定向钻机防倾倒控制系统及方法与流程
本发明属于瓦斯抽放装备领域,具体一种高扭矩定向钻机防倾倒控制系统及方法。
背景技术:
1、针对现有煤矿定向钻机回转器在矿山巷道瓦斯、探放水等大直径钻孔施工中存在的扭矩能力不足、钻进工艺适应性差等问题,设计出高扭矩定向钻机,以满足煤矿巷道大直径瓦斯、探放水钻孔高扭矩的要求。
2、高扭矩定向钻机扭矩可以达到25000nm,外观尺寸(长×宽×高)411×348×112,高扭矩钻机由于扭矩高、外形尺寸大,常规支撑稳固控制方式不能满足要求,目前常规支撑稳固控制方式采用液压手柄一次性固定定性稳固,即上下左右前后共计10个支腿接触到煤壁即可,钻机在钻进过程中遇到岩层或硬煤,动力头给进遇阻容易引起钻机倾斜或向后顶翻,钻机在起钻过程中,动力头低转速高速度起拔容易引起钻机倾斜或向前拉翻,导致设备和钻具不可逆的损坏。
技术实现思路
1、针对现有技术中存在的不足,本发明的目的在于,提供一种高扭矩定向钻机防倾倒控制系统及方法,以解决常规支撑稳固控制方式无法满足高扭矩钻机的扭矩高、外形尺寸大等要求,避免因岩层变化引起钻压变化导致钻机移位,致使钻孔与钻具产生扭曲变形,造成卡钻事故,还能避免强力提钻导致钻机倾倒损坏设备,造成人员安全隐患。
2、为了解决上述技术问题,本发明采用如下技术方案予以实现:
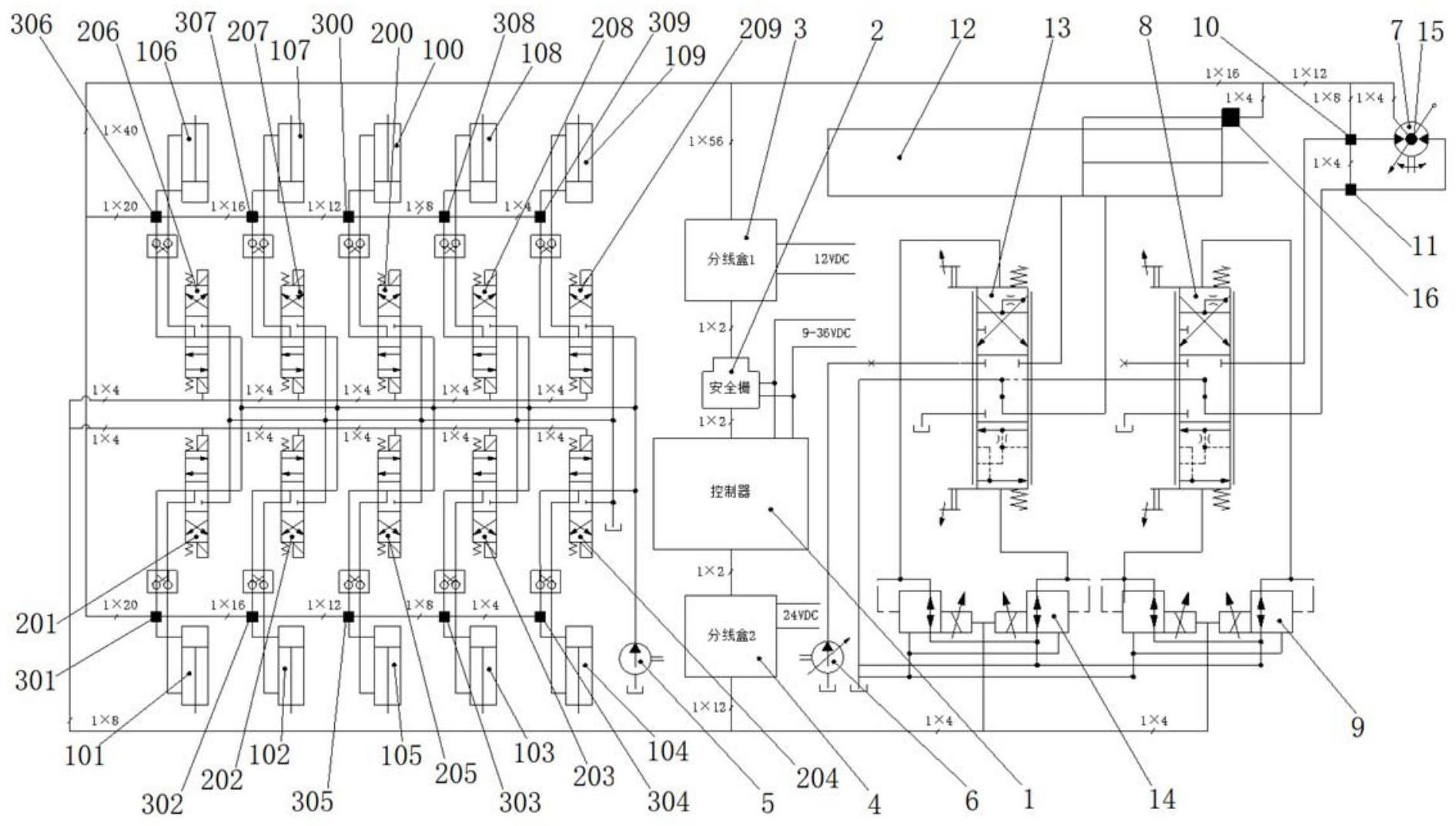
3、一种高扭矩定向钻机防倾倒控制系统,包括布设在钻机车体的多个支腿、电磁阀、压力传感器、控制器、安全栅、分线盒i、分线盒ii、定量泵、变量泵、动力头、动力头回转主阀、动力头回转电磁阀、正转压力传感器、反转压力传感器、给进托板、动力头移动主阀、动力头移动电磁阀、角度编码器和位移编码器;
4、所述定量泵与各支腿分别通过油路相连,在支腿与定量泵之间的油路上设置所述电磁阀,在电磁阀与支腿之间的油路上设置所述压力传感器;各压力传感器、角度编码器和位移编码器接入分线盒i,分线盒i输出信号线接入安全栅,安全栅输出信号线接入控制器,控制器输出信号线接入分线盒ii,分线盒ii输出信号线接入各电磁阀;
5、所述动力头回转主阀设在变量泵和动力头之间的油路上,动力头回转电磁阀设在动力头回转主阀低压供油口和先导油口之间的油路上,正转压力传感器和反转压力传感器设在动力头回转主阀和动力头之间的油路上,角度编码器设在动力头上;
6、所述动力头移动主阀设在变量泵和给进托板之间的油路上,动力头移动电磁阀设在动力头移动主阀低压供油口和先导油口之间的油路上,位移编码器设在给进托板上。
7、本发明还包括如下技术特征:
8、具体的,所述支腿有十个,分别为位于钻机车体左前上部、左前下部、左后上部、左后下部、前部、右前上部、右前下部、右后上部、右后下部和后部的支腿一、支腿二、支腿三、支腿四、支腿五、支腿六、支腿七、支腿八、支腿九和支腿十;支腿一与支腿六、支腿二与支腿七、支腿三与支腿八、支腿四与支腿九均沿钻机车体轴向中心线对称,支腿五和支腿十沿钻机车体径向中心线对称。
9、具体的,所述电磁阀有十个,分别为电磁阀一、电磁阀二、电磁阀三、电磁阀四、电磁阀五、电磁阀六、电磁阀七、电磁阀八、电磁阀九和电磁阀十,并与所述支腿一~支腿十依次一一对应。
10、具体的,所述压力传感器有十个,分别为压力传感器一、压力传感器二、压力传感器三、压力传感器四、压力传感器五、压力传感器六、压力传感器七、压力传感器八、压力传感器九和压力传感器十,并与所述支腿一~支腿十依次一一对应;压力传感器一~压力传感器十分别对应检测支腿一~支腿十的伸出压力。
11、具体的,所述分线盒i供电线接入12vdv,分线盒ii供电线接入24vdv,安全栅和控制器供电线接入9~36vdv。
12、一种高扭矩定向钻机防倾倒控制方法,该方法通过所述的高扭矩定向钻机防倾倒控制系统实现,包括以下步骤:
13、步骤1,程序开始,自检后进入各支腿预稳固,各压力传感器反馈压力信息,判断是否达到压力阈值,若达到压力阈值则进入步骤2,未达到压力阈值则再次进入步骤1;
14、步骤2,进入钻进或起钻控制选择,钻进控制进入步骤3,起钻控制进入步骤6;
15、步骤3,控制器通过电信号控制动力头回转电磁阀开启,动力头回转电磁阀开启控制动力头回转主阀开启,动力头回转主阀开启控制动力头正转,同时控制器通过电信号控制动力头移动电磁阀开启,动力头移动电磁阀开启控制动力头移动主阀开启,动力头移动主阀开启控制动力头给进,动力头转速通过角度编码器获取,动力头速度通过位移编码器获取,动力头正转压力通过正转压力传感器获取;
16、步骤4,控制器接收动力头转速、速度和压力信息并做判断,检测到动力头正转压力高于12mpa,控制器调节动力头回转电磁阀和动力头移动电磁阀阀芯开口度,保持动力头高转速,保持动力头零速度,动力头转速和速度达到要求进入步骤5,未达到则再次进入步骤4;
17、步骤5,控制器通过电信号控制电磁阀五和电磁阀十开启,以分别控制支腿五和支腿十,当支腿五和支腿十与煤层巷道侧帮压力分别达到压力阈值时进入步骤6,若未达到压力阈值则再次进入步骤5;
18、步骤6,控制器通过电信号控制电磁阀一~电磁阀四以及电磁阀六~电磁阀九开启,以分别控制支腿一~支腿四以及支腿六~支腿九,当支腿一~支腿四以及支腿六~支腿九与煤层巷道煤壁压力分别达到压力阈值时进入步骤7,若未达到压力阈值则再次进入步骤6;
19、步骤7,钻进通过控制器调节动力头移动电磁阀阀芯开口度,保持动力头低速度,动力头速度达到要求进入步骤8,未达到则再次进入步骤7;起钻则进入步骤9;
20、步骤8,控制器接收动力头位置信息并做判断,检测到动力头位置达到1800mm,结束进入步骤15,未达到则进入步骤3;
21、步骤9,控制器通过电信号分别控制电磁阀五和电磁阀十,以开启控制支腿五和支腿十,保持支腿五与煤层巷道侧帮压力阈值,保持支腿十与煤层巷道侧帮压力阈值,达到压力阈值进入步骤10,若未达到则再次进入步骤9;
22、步骤10,控制器通过电信号控制动力头回转电磁阀和动力头移动电磁阀阀芯开口度,保持动力头高转速,保持动力头低速度,动力头转速和速度达到要求进入步骤11,未达到则再次进入步骤10;
23、步骤11,控制器接收动力头位置信息并做判断,大于动力头相对位置阈值进入步骤12,小于则进入步骤10;
24、步骤12,控制器通过电信号控制动力头回转电磁阀和动力头移动电磁阀阀芯开口度,保持动力头低转速,保持动力头高速度,动力头转速和速度达到要求进入步骤13,未达到进入步骤12;
25、步骤13,控制器接收动力头位置信息并做判断,检测到动力头位置小于2mm,进入步骤14;
26、步骤14,继续则进入步骤2,结束则进入步骤15;
27、步骤15,动作执行结束。
28、具体的,所述步骤步骤1中压力阈值为5mpa。
29、具体的,所述步骤5中,支腿五与煤层巷道侧帮压力阈值为5mpa,支腿十与煤层巷道侧帮压力阈值为15mpa;
30、所述步骤6中,支腿一~支腿四以及支腿六~支腿九与煤层巷道煤壁压力阈值为10mpa;
31、所述步骤9中,支腿五与煤层巷道侧帮压力阈值为15mpa,保持支腿十与煤层巷道侧帮压力阈值为5mpa。
32、具体的,所述步骤4中,动力头高转速为80~100r/m;
33、所述步骤7中,动力头低速度为低于2mm/s;
34、所述步骤10中,动力头高转速为80~100r/m,动力头低速度为低于8mm/s;
35、所述步骤12中,动力头低转速为40~50r/m,动力头高速度为高于15mm/s。
36、具体的,所述步骤11中,动力头相对位置阈值为150mm。
37、本发明与现有技术相比,具有如下技术效果:
38、本发明通过布设角度编码器、位移编码器、压力传感器分别获取钻机动力头回转和位置信息、液压件压力信息,程序控制开关电磁阀、比例电磁阀动作实现高扭矩定向钻机在司钻过程中钻机机身无倾斜、翻倒现象。
39、与常规采用液压手柄一次性固定定性稳固方式相比,本发明控制系统及方法可以实时调节钻机在钻进或起钻过程稳固支腿压力、动力头转速、速度阈值,避免因岩层变化引起钻压变化导致钻机移位,致使钻孔与钻具产生扭曲变形,造成卡钻事故,以及强力提钻导致钻机倾倒损坏设备,造成人员安全隐患。
40、本发明能根据地层变化,通过控制器自适应调节各支腿的伸出压力,且能独立控制各支腿的伸出压力,有效避免高扭矩定向钻机机身倾斜和翻倒。
- 还没有人留言评论。精彩留言会获得点赞!