无传感器确定体积流量和压力的方法和装置与流程
1.本发明涉及一种在无传感器的情况下确定体积流量和压力的方法和装置,其用于调节通风设备的ec电机驱动的风扇。
背景技术:
2.对于具有通风系统的建筑物和设施的通风换气,通常需要使用具有通风管道和通风井的通风设备来控制气流。在风道中输送导入或排出的空气,通过通风系统的一个或多个风扇移动,以达到所需的和尽可能恒定的体积流量强度。
3.管道长度、管道直径、管道材料以及通风系统其他部分的造型,例如出风口的造型都由通风设备的制造商单独确定。通风设备中使用的风扇的制造商通常不知道这些应用的设计特点和影响因素。
4.通风系统的设计应尽可能针对个别情况进行优化。然后在实际运行中必须遵循理论上唯一计算的和必要的体积流量。它们尤其不应偏离事先计算的值,并且如果可能应极少波动或根本不波动。
5.de 10 2011 106 962 a1公开了一种用于通风系统的鼓风机,其具有电机和相关联的控制装置,该控制装置通过电机电流的实际
‑
目标比较来控制电机以输送恒定量的空气。
6.de 10 2008 057 870 a1描述了一种通风设备的控制装置,该装置将鼓风机的电机调节到消耗的电功率和对应转数所需的电功率之间的差距尽可能小。
7.de 10 2004 060 206 b3描述了一种用于根据转矩特征曲线运行整流器馈电的压缩机的方法,并且de 10 2005 045 137 a1描述了一种用于以预先给出的恒定风量或工作压力运行通风单元的方法,其中所述通风单元具有用于驱动风扇叶轮的电动机和电机控制装置,并且其中电机控制装置基于特征曲线确定用于操作点的电机电压。
8.众所周知,风扇具有所谓的风扇特征曲线,该曲线描述了其在不受控制影响情况下的性能。在通风系统的规划中基于具体使用情况的各种参数计算通风设备的期望目标体积流量。如果体积流量低于目标值,则输送的空气太少。因此希望提供在各个工作区域中具有尽可能倾斜的风扇特征曲线的风扇,也就是说,可以在反压力增加的情况下尽可能长时间地保持恒定的体积流量。
9.此外,从现有技术中对配备所谓ec电机的通风设备的风扇已经有足够的了解。ec电机表示无刷直流电动机。例如根据永磁体在转子上的位置来控制电机绕组。这会产生一个几乎理想地应用于转子的磁场,从而使ec电机能够高效运行。对于这种类型的控制需要知道转子相对于定子的位置。这可以通过各种已知的方式来完成,例如借助霍尔传感器和磁铁。与其他电机相比,使用ec电机可以显著降低功耗。ec电机通常有内部控制装置,仅ec电机的功耗或多或少保持恒定。在通风技术中使用ec电机的缺点是它们的风扇特征曲线。由于自由鼓风运行中的体积流量强度,ec电机驱动的风扇的体积流量随着反压力的增加而不断降低。因此,风扇特征曲线缺乏“期望”的斜率。
10.因此已知在通风设备中使用ec电机时要设置更复杂的控制装置,以便在变化的反压力下保持体积流量尽可能恒定。通常使用传感器来检测传感器数据,并在此基础上能够有针对性地改变反压力变化时风扇的转速,以保持预先给出的目标体积流量或目标压力。
11.另外从现有技术中已知,为此作为选择或额外地使用体积流量传感器。然而,这种传感器的使用具有技术复杂性高的缺点,特别是在典型的通风应用中出现与大气压力相比非常低的反压力值,因此必须使用对压力或体积流量非常敏感的传感器。传感器的使用由此不仅昂贵和复杂,而且还具有其他缺点,例如传感器故障、传感器污染等。
12.此外,对于例如实验室应用中要求的具有精确控制的体积流量,需要使用额外的传感器来检测体积流量。因此例如将热传感器连接到应冷却的组件上。如果温度升高,则风扇的转速增加,但不知道对体积流量或压力的确切影响。因此,希望有将ec电机驱动的通风装置的风扇在无传感器控制下调节至特定体积流量和/或操作点的技术解决方案或方法,以实现和保持预先给出的目标体积流量或目标压力。
技术实现要素:
13.因此,本发明的目的是克服现有技术中的上述缺陷并提出简单且廉价的解决方案,用于在无传感器的情况下将通风设备的ec电机驱动的风扇调节至特定的体积流量、压力和/或操作点。
14.所述目的通过根据权利要求1的技术特征组合来实现。
15.本发明的基本构思涉及人工神经网络的顺序学习,由此借助经过神经网络学习可以从输入参数确定相应的实际体积流量或实际压力。如果所述神经网络在经过足够的学习过程之后,则可以确定这种风扇类型的体积流量和/或压力并在运行期间进行调节。
16.因此,确定体积流量(或压力)的相关参数是神经网络的输入值。所述相关参数是对体积流量有物理影响的那些参数。例如线圈电流或者在无法测量的情况下可以是流入风机的ec电机中间电路的电流、风扇转速和电机的实际调制度数(aussteuergrad)。如果神经网络在输入电压或中间电路电压波动的情况下、或在不同温度下确定体积流量和/或压力,则网络输入电压和实际温度也用作输入参数。如果独立于实际空气压力确定体积流量,则空气压力也可以用作输入变量。输入参数的数量决定人工神经网络的输入神经元数量。
17.根据本发明提出一种用于确定体积流量或压力的方法,其用于将特定通风设备的优选的用ec电机驱动的风扇调节至特定操作点,以在不使用压力传感器或体积流量传感器的情况下实现并保持通风设备预先给定的目标体积流量(或压力),其中借助人工神经网络基于由多个学习步骤构成的顺序学习方法来确定体积流量,其中在一个或更多个层中设置n个人工神经元的连接,并且设置至少一个输入层pi,以处理对通风设备中的体积流量有直接或间接影响的数量为i的输入参数。
18.尤其有利的是,首先检测风扇在整个运行范围内物理量的多个实际测量数据,其中所述测量数据至少包含i个输入参数以及一个或多个待确定的输出参数,随后人工神经网络利用这些输入参数和输出参数基于具有多个变量的预先确定的算法进行学习,并且确定神经网络的各个计算顺序中算法的变量,使得神经网络的输出尽可能地与测量的数据越来越匹配。
19.还有利地,人工神经网络由前馈神经网络构成,并且特别地,所述人工神经网络具
有输入层pi、至少一个具有激活函数f
z
的中间层z和具有激活函数f
o
的输出层a。
20.在本发明的特别有利的实施例中规定,中间层z具有可选择数量n个神经元,其中数量n可以根据输入值的数量和期望的确定精度的值中选择。
21.还有利地,中间层z的每个神经元通过激活函数f
z
将其状态输出到输出层a。
22.在本发明的同样有利的实施例中,所述激活函数f
z
优选地使用如下的双曲正切函数:
[0023][0024]
其中:
[0025]
out
j
:中间层的第j个神经元的输出
[0026]
f
z
:中间层z的激活函数
[0027]
w
jk
:中间层的第k个输入神经元对第j个神经元的加权
[0028]
b
j
:中间层的第j个神经元的偏置
[0029]
i:输入神经元的数量。
[0030]
还有利地,输出层a由一个或两个神经元组成,其中用线性函数作为输出神经元的激活函数:
[0031][0032]
其中:
[0033]
a:神经元的输出
[0034]
f0:输出层的激活函数
[0035]
q
k
:中间层z的第k个神经元对输出神经元的加权
[0036]
b:输出神经元的偏置
[0037]
n:中间层的神经元的数量。
[0038]
在此有利的是,用于神经网络学习的参数b
j
、w
jk
、q
k
和b
o
逐步匹配每个计算序列,直至神经网络确定的输出神经元显示的体积流量和/或压力对应于偏差小于预先给出的最大允许偏差的实际测量的体积流量和/或压力。换句话说,即神经网络经过充分学习,以能够在没有传感器的情况下以足够的精度确定所需值。
[0039]
本发明的另一方面涉及一种用于执行如上所述的方法的装置,其中所述装置配备有在通风设备中的风扇、用于检测输入参数和输出参数的多个传感器、基于由传感器检测的物理测量数据确定输入参数和输出参数的测量装置,和具有预先给定的拓扑的人工神经网络的数据处理单元,其中所述数据处理单元具有至少一个接口,以将检测的输入参数传输到至少输入层。输出参数被传输到数据传输单元。
附图说明
[0040]
本发明的其他有利的改进方案在从属权利要求中表征,或如下参照附图与对本发明的优选实施方案的说明一起进行详细描述。
[0041]
其中:
[0042]
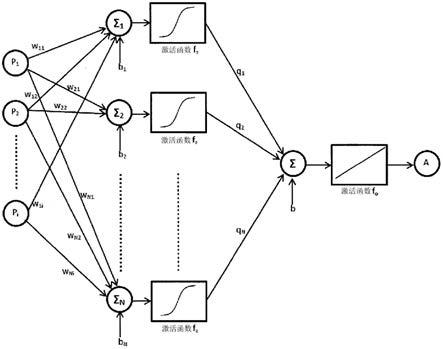
图1示出实现人工神经网络的示意性概念图,
[0043]
图2示出误差曲线,其显示第一示例性实施例中确定体积流量时的相对误差,和
[0044]
图3示出误差曲线,其显示替代的示例性实施例中确定体积流量时的相对误差。
具体实施方式
[0045]
以下依据参照图1至图3所示的两个示例性实施例更详细地描述本发明,其中附图中相同的附图标记表示相同的结构和/或功能特征。
[0046]
图1示出了实现设计为前馈网络的人工神经网络的示意性概念图。所述人工神经网络具有输入层pi、具有激活函数f
z
的中间层z和具有激活函数f
o
的输出层a。
[0047]
此外,在网络拓扑结构中示出加权参数w
jk
,即w
11
、w
12
、w
21
、w
22
...,分别表示第k个输入神经元在中间层第j个神经元上的加权。偏置神经元用b、b1、b2...bn表示,即b
j
表示中间层的第j个偏置神经元。
[0048]
输出层中a表示输出神经元的输出。这对应检测的体积流量。还示出了输出层的激活函数f
o
,以及中间层z的第k个神经元对输出神经元的加权qk。
[0049]
图2示出误差曲线,其显示第一示例性实施例中确定体积流量时的相对误差,第一示例性实施例示出了具有两个输入神经元的网络拓扑结构,即一个输入神经元用于流量和另一个输入神经元用于转速。
[0050]
在所述实施例中,中间层由10个神经元构成,输出层由一个神经元构成。使用双曲正切函数作为中间层f
z
的激活函数,使用线性函数作为输出层的激活函数。
[0051]
相对误差是近似的和测量的体积流量之间的误差除以测量的体积流量,以百分数应用在测量的体积流量上,其中大于20%的误差被限制为20%。可以看出,由于相对误差(近似误差
‑
实测误差)的影响,误差越来越小。
[0052]
图3中示出误差曲线,其显示替代的示例性实施例中确定体积流量时的相对误差,所述实施例示出了具有三个输入神经元的网络拓扑结构,即一个输入神经元用于流量,一个输入神经元用于转速,另一个用于电机的实际调制度数。
[0053]
在这个实施例中,中间层由15个神经元构成,输出层同样由一个神经元构成。与图2的实施例相同,使用双曲正切函数作为中间层的激活函数f
z
,和使用线性函数作为输出层的激活函数。
[0054]
本发明的实施不限于前面给出的优选实施例。相反,还可以设想多种变化,即使在类型不同的实施例中使用所示解决方案。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1