一种新型提升器及拖拉机的制作方法
1.本实用新型涉及拖拉机技术领域,具体涉及一种新型提升器及拖拉机。
背景技术:
2.拖拉机提升液压系统主要用于控制机具的提升、下降以及耕作的深度,通过控制流体介质的流动方向和压力大小来实现目的。在中小马力拖拉机上力位控制型提升液压系统是一种产常见的控制系统。目前力位控制型提升器主要有两种类型:(1)力位单独控制提升器,(2)力位综合控制提升器。现有的力位控制型提升器主要由提升器壳体,提升控制阀,力位操纵机构,力位反馈机构,提升油缸、提升臂及提升轴组成,其中提升油缸内置于提升器壳体内部。通过操纵力位操纵机构控制提升控制阀换向,液压油进入提升油缸,提升油缸通过提升轴带动提升臂旋转进而实现机具的提升。机具下降时只能依靠自身重力,无法借助外力。力位控制型提升器特点是:操作简单,对机手操作水平要求低,可以保证良好的耕深均匀性,能够实现耕深的自动调节。力位控制型提升器的力位操纵位置是连续的,力位操纵的每一个位置对应着一种提升高度。在田间调头时若将机具提到最高需将操纵手柄由工作位操纵到对应提升最高的位置,操纵行程大,操纵复杂。
3.现有的无论是力位单独还是力位综控制型提升器主要包括提升器壳体、提升控制阀、力位操纵机构、力位反馈机构、上拉杆支座、提升油缸、提升臂及提升轴组成。其中提升油缸内置于提升器壳体内部,维修保养困难,且提升油缸为卧式单油缸;提升器与多路阀通过管路连接,结构复杂,空间布置困难,通用性差。
技术实现要素:
4.本实用新型所要解决的技术问题是提供一种新型提升器及拖拉机,旨在解决上述技术问题。
5.本实用新型解决上述技术问题的技术方案如下:
6.一种新型提升器,包括提升控制阀总成和摇臂,所述摇臂的一端与所述提升控制阀总成的阀芯转动连接并定位,另一端用于与提升手柄传动连接。
7.本实用新型的有益效果是:应用时,摇臂的另一端通过软轴与提升手柄的一端连接,提升手柄只有两个位置提升位和下降位,在两个位置都有定位机构进行定位,通过复位弹簧进行复位;在使用力位控制功能时,快速提升提升手柄处于下降位;当使用快速提升功能时,只需将快速提升提升手柄拨到提升位,便可将机具直接提升到最高位置;提升完毕需要将机具恢复到原来的位置时只需将快速提升提升手柄拨到下降位,机具就会自动恢复到力位操纵设定好的位置。本实用新型结构简单,可实现机具快速提升,精准度高,操作简便,使用非常方便。
8.上述技术方案的基础上,本实用新型还可以做如下改进。
9.进一步,还包括提升轴,所述提升轴水平转动的安装在所述提升控制阀总成的一侧,其两端分别固定套设有外提升臂,两个所述外提升臂的一端分别与提升杆传动连接。
10.采用上述进一步方案的有益效果是使用时,通过本领域技术人员所能想到的方式转动提升轴,提升轴通过两个外提升臂带动提升杆上下移动,以实现相应的作业。
11.进一步,所述提升轴远离所述提升控制阀总成的一侧固定安装有两个提升油缸,两个所述提升油缸的伸缩端分别与两个所述外提升臂的中部转动连接;两个所述提升油缸同步伸缩,并带动两个所述外提升臂上下翻转。
12.采用上述进一步方案的有益效果是作业时,两个提升油缸同步伸缩,并带动两个外提升臂上下翻转,实现自动提升。
13.进一步,两个所述外提升臂的一端通过销轴连接,所述提升杆的一端与所述销轴转动连接,另一端用于与操作手柄传动连接。
14.采用上述进一步方案的有益效果是结构简单,设计合理,采用双油缸作业,增大提升力,保证提升作业的顺利进行。
15.进一步,还包括位反馈机构,所述位反馈机构的两端分别与所述提升轴和所述提升控制阀总成的阀芯转动连接。
16.采用上述进一步方案的有益效果是作业时,通过位反馈机构反应提升控制阀总成的阀芯的位置变化,并将对应的信息传递给控制系统,以便及时反馈提升控制阀总成转动的位置信息,实现精确控制。
17.进一步,所述位反馈机构为连杆组件。
18.采用上述进一步方案的有益效果是结构简单,设计合理,实现提升控制阀总成位置的快速反馈。
19.进一步,还包括力反馈机构和上拉杆支座,所述上拉杆支座固定安装在所述提升轴远离所述提升控制阀总成的一侧,所述力反馈机构的两端分别与所述上拉杆支座和所述提升控制阀总成的阀芯转动连接。
20.采用上述进一步方案的有益效果是作业时,通过力反馈机构反应提升控制阀总成的阀芯力的变化,并将对应的信息传递给控制系统,以便及时反馈提升控制阀总成转动的力信息,实现精确控制。
21.进一步,所述力反馈机构为连杆机构。
22.采用上述进一步方案的有益效果是结构简单,设计合理,实现提升控制阀总成力的快速反馈。
23.进一步,还包括多路阀及上侧敞口的提升壳体,所述提升控制阀总成固定安装在所述提升壳体上,所述提升轴水平转动的安装在所述提升壳体上;所述多路阀固定安装在所述提升壳体上,用于控制提升机具的机具油缸。
24.采用上述进一步方案的有益效果是结构紧凑,集成度高,节省空间;另外,多路阀通过内部油路连接,省去了管路连接,且多路阀可选装不同组数。
25.本实用新型还涉及一种拖拉机,包括如上所述的新型提升器。
26.采用上述进一步方案的有益效果是模块化设计,结构合理,通用化程度高;通过各组成部分的拆分组合可以组合成力位控制型提升器、强压控制型提升器及电控提升器三种不同控制类型的提升器,功能多样,使用方便。
附图说明
27.图1为本实用新型的主视图;
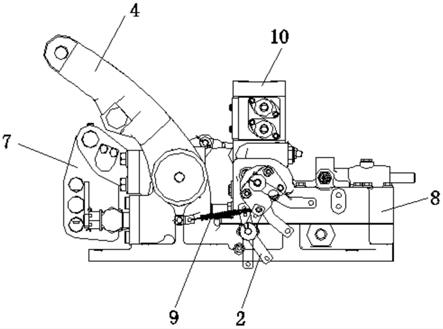
28.图2为本实用新型的后视图;
29.图3为本实用新型中提升手柄提升位的结构示意图;
30.图4为本实用新型中提升手柄下降位的结构示意图。
31.附图中,各标号所代表的部件列表如下:
32.1、提升控制阀总成,2、摇臂,3、提升轴,4、外提升臂,5、位反馈机构,6、力反馈机构,7、上拉杆支座,8、提升壳体,9、复位弹簧,10、多路阀,11、提升手柄,12、定位钢球,13、连接弹簧。
具体实施方式
33.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
34.如图1至图4所示,本实用新型提供一种新型提升器,包括提升控制阀总成1和摇臂2,摇臂2的一端通过转轴与提升控制阀总成1的阀芯转动连接并定位,另一端用于与提升手柄11传动连接,通常采用转轴连接。应用时,摇臂2的另一端通过软轴与提升手柄11的一端连接,提升手柄11只有两个位置提升位和下降位,在两个位置都有定位机构进行定位,通过复位弹簧9进行复位;在使用力位控制功能时,快速提升提升手柄11处于下降位;当使用快速提升功能时,只需将快速提升提升手柄11拨到提升位,便可将机具直接提升到最高位置;提升完毕需要将机具恢复到原来的位置时只需将快速提升提升手柄11拨到下降位,机具就会自动恢复到力位操纵设定好的位置。本实用新型结构简单,可实现机具快速提升,精准度高,操作简便,使用非常方便。
35.上述复位弹簧9的两端分别与摇臂2的一端和提升壳体8固定连接,即摇臂2处于工作位时,复位弹簧9处于拉伸状态,然后在复位弹簧9弹力的作用下摇臂2回到非工作位。
36.上述提升手柄11的具体定位方式为:提升手柄11通过转轴转动的安装在车辆驾驶室内,其下端通过软轴与摇臂2的另一端传动连接,软轴的两端分别与摇臂2的一端及提升手柄11的下端固定连接;驾驶室内设有定位钢球12,定位钢球12通过连接弹簧13与驾驶室固定连接,提升手柄11上上下间隔设有与定位钢球12配合的提升位卡槽和下降位卡槽。作业时,当提升手柄11翻转至提升位时,定位钢球12卡入提升位卡槽内(如图3所示);当提升手柄11翻转至下降位时,定位钢球12卡入下降位卡槽内(如图4所示),从而实现提升手柄11的快速定位。
37.实施例1
38.在上述结构的基础上,本实施例还包括多路阀10及上侧敞口的提升壳体8,提升控制阀总成1通过螺栓固定安装在提升壳体8上,提升轴3水平转动的安装在提升壳体8上,其两侧分别与提升壳体8的两侧转动连接;多路阀10固定安装在提升壳体8上,用于控制提升机具的机具油缸,结构紧凑,集成度高,节省空间。
39.应用时,上述提升壳体8通过螺栓固定在拖拉机的后桥壳体上。
40.上述多路阀10的具体结构及其与机具油缸之间的连接及控制关系均采用现有技术,在此不再进行赘述;另外,机具油缸的伸缩端固定连接有机具。
41.实施例2
42.在实施例一的基础上,本实施例还包括提升轴3,提升轴3水平转动的安装在提升控制阀总成1的一侧,其两端分别与提升壳体8的两侧转动连接,且其两端分别固定套设有外提升臂4,两个外提升臂4的一端分别与提升杆传动连接,具体安装方式为:两个外提升臂4的一端通过销轴连接,提升杆的一端转动套设于销轴上,且提升杆的一端设有与销轴配合的通孔。使用时,通过本领域技术人员所能想到的方式转动提升轴3,提升轴3通过两个外提升臂4带动提升杆上下移动,以实现相应的作业。
43.实施例3
44.在实施例二的基础上,本实施例中,提升轴远离提升控制阀总成1的一侧固定安装有两个提升油缸,两个提升油缸通过螺栓固定于提升壳体8的一端上,其伸缩端分别通过销轴与两个外提升臂4的中部转动连接;两个提升油缸同步伸缩,并带动两个外提升臂4上下翻转。作业时,两个提升油缸同步伸缩,并带动两个外提升臂4上下翻转,实现自动提升。
45.除上述实施方式完,也可以采用一个提升油缸,但是该方案的提升力明显小于上述方案的提升力,无法保证提升作业的顺利完成。
46.实施例4
47.在实施例二的基础上,本实施例中,两个外提升臂4的一端通过销轴连接,提升杆的一端上设有通孔,并转动套设于销轴上,另一端用于与操作手柄传动连接,即通过销轴与操作手柄转动连接,结构简单,设计合理,采用双油缸作业,增大提升力,保证提升作业的顺利进行。
48.除上述实施方式外,提升杆一端的两侧可以分别通过转轴与两个外提升臂4的一端连接,两个转轴与提升杆一体成型,且两个转轴相互远离的一端分别与两个外提升臂4的一端转动连接。
49.实施例5
50.在实施例二的基础上,本实施例还包括位反馈机构5,位反馈机构5的两端分别通过销轴与提升轴3和提升控制阀总成1的阀芯转动连接。作业时,通过位反馈机构5反应提升控制阀总成1的阀芯的位置变化,并将对应的信息传递给控制系统,以便及时反馈提升控制阀总成1转动的位置信息,实现精确控制。
51.上述提升轴3的一端与传动杆连接,传动杆的另一端延伸至控制系统,即位反馈机构将提升控制阀总成1的阀芯的位置信息反馈给提升轴3,提升轴3铜火锅传动杆传递给控制系统,以便控制系统及时获知提升控制阀总成1阀芯的变化。
52.实施例6
53.在实施例五的基础上,本实施例中,位反馈机构5优选为连杆组件,结构简单,设计合理,实现提升控制阀总成1位置的快速反馈。
54.实施例7
55.在实施例二的基础上,本实施例还包括力反馈机构6和上拉杆支座7,上拉杆支座7固定安装在提升轴3远离提升控制阀总成1的一侧,即通过螺栓固定在提升壳体8的另一端;力反馈机构6的两端分别通过销轴与上拉杆支座7和提升控制阀总成1的阀芯转动连接。作业时,通过力反馈机构6反应提升控制阀总成1的阀芯力的变化,并将对应的信息传递给控制系统,以便及时反馈提升控制阀总成1转动的力信息,实现精确控制。
56.实施例8
57.在实施例七的基础上,本实施例中,力反馈机构6优选为连杆机构,结构简单,设计合理,实现提升控制阀总成1力的快速反馈。
58.上述提升轴3的一端与传动杆连接,传动杆的另一端延伸至控制系统,即位反馈机构将提升控制阀总成1的阀芯的位置信息反馈给提升轴3,提升轴3铜火锅传动杆传递给控制系统,以便控制系统及时获知提升控制阀总成1阀芯的变化。
59.实施例9
60.在上述结构的基础上,本实施例还涉及一种拖拉机,包括如上所述的新型提升器。本实施例模块化设计,结构合理,通用化程度高;通过各组成部分的拆分组合可以组合成力位控制型提升器、强压控制型提升器及电控提升器三种不同控制类型的提升器,功能多样,使用方便。
61.本实用新型的工作原理如下:
62.进行力(位)控制时,提升手柄11处于下降位。当需要提升机具时,将力控制手柄或位控制手柄由初始位置拉到机具提升高度对应的手柄位置,机具就可以提升到相应的位置高度停止并保持。当需要将机具由提升位置进行下降时,将力控制手柄或位控制手柄由对应提升位置拉到下降位置,机具便可进行下降。
63.需要进行快速提升时,无论力(位)控制手柄处于任何位置,只需将快速提升手柄11由下降位操纵到提升位,机具就会一直提升到可提升的最高位置然后停止,当快速提升手柄11由提升位操作到下降位时,机具会由最高位置恢复到力(位)操纵手柄对应高度的位置。此后可正常进行力(位)控制操作。
64.应用时,摇臂2的另一端通过软轴与提升手柄11的一端连接,提升手柄11只有两个位置工作位和非工作位,在两个位置都有定位机构进行定位,通过复位弹簧进行复位;在使用力位控制功能时,快速提升提升手柄11处于下降位;当使用快速提升功能时,只需将快速提升提升手柄11拨到提升位,便可将机具直接提升到最高位置;提升完毕需要将机具恢复到原来的位置时只需将快速提升提升手柄11拨到下降位,机具就会自动恢复到力位操纵设定好的位置;
65.另外,手动提升操作手柄,并通过提升杆带动两个外提升臂上下翻转,同时两个提升油缸作用,提供足够的提升力;同时,分别通过位反馈机构5和力反馈机构6反应提升控制阀总成1的阀芯力和位置的变化,并将对应的信息传递给控制系统,以便及时反馈提升控制阀总成1转动的力和位的信息,实现精确控制。
66.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1