真空排气方法及真空排气系统与流程
1.本发明涉及一种真空排气方法及真空排气系统。
背景技术:
2.为了将半导体制造装置(例如,蚀刻装置、化学气相成长装置(cvd)等)的真空腔室维持在真空状态,已知有对真空腔室内的气体进行排气的真空泵装置。
3.供给至真空腔室内的成膜用的气体(处理气体)可能包含生成副生成物的气体。在该情况下,当真空泵装置对真空腔室内的气体进行排气时,存在副生成物和气体一起流入真空泵装置内,或副生成物在真空泵装置内生成的担忧。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开平10-252651号公报
7.专利文献2:日本特开2004-293466号公报
8.发明所要解决的技术问题
9.副生成物依存于温度和压力而生成。例如,副生成物在高压时(及/或低温时)容易生成。因此,作为抑制副生成物的生成的手段,可以考虑降低向真空泵装置内供给的气体的压力的方法。该方法的一例是将用于稀释气体的浓度的非活性气体导入真空泵装置内的方法。
10.但是,在这样的方法中,更多的气体被导入真空泵装置。因此,用于驱动真空泵装置的消耗电力变大,从而真空泵装置的转速到达额定的转速(额定转速)之前就可能停滞。作为结果,可能产生真空泵装置的启动需要非常多的时间,或真空泵装置的转速无法达到额定转速这样的问题。
技术实现要素:
11.因此,本发明的目的在于,提供一种能够抑制副生成物的生成,并解决伴随非活性气体的导入的问题的真空排气方法及真空排气系统。
12.用于解决技术问题的技术手段
13.在一个方式中,提供一种通过真空泵装置对真空腔室进行排气的真空排气方法。真空排气方法包含如下工序:上升工序,在使所述真空泵装置起动之后,使所述真空泵装置的转速上升至规定的稳定速度;以及气体导入工序,在所述真空泵装置的转速到达所述稳定速度之后,向所述真空泵装置导入非活性气体。
14.在一个方式中,所述稳定速度包含第一稳定速度,该第一稳定速度是所述真空泵装置的当前的转速中的逆变器输出变得大于所述真空泵装置的轴输出时的速度,在所述真空泵装置的转速到达所述第一稳定速度之后,执行所述气体导入工序。
15.在一个方式中,所述稳定速度包含第二稳定速度,该第二稳定速度是所述真空泵装置的转速为额定转速时的速度,在所述真空泵装置的转速到达所述第二稳定速度之后,
执行所述气体导入工序。
16.在一个方式中,所述真空排气方法包含气体加热工序,通过与所述真空泵装置连接的非活性气体供给线路对所述非活性气体进行加热。
17.在一个方式中,所述真空排气方法包含开动作工序,在所述气体导入工序中,打开开闭阀,该开闭阀安装于与所述真空泵装置连接的非活性气体供给线路。
18.在一个方式中,所述真空排气方法包含如下工序:第一导入工序,通过从与所述真空泵装置连接的非活性气体供给线路分支的旁通线路将包含零流量的第一流量的非活性气体导入所述真空泵装置;以及第二导入工序,将大于所述第一流量的第二流量的非活性气体导入所述真空泵装置。
19.在一个方式中,提供一种真空排气系统,具备:真空泵装置,该真空泵装置对真空腔室进行排气;气体导入装置,该气体导入装置向所述真空泵装置导入非活性气体;以及控制装置,该控制装置对所述真空泵装置的动作和所述气体导入装置的动作进行控制。所述控制装置在使所述真空泵装置起动之后,使所述真空泵装置的转速上升至规定的稳定速度,在所述真空泵装置的转速到达所述稳定速度之后,所述控制装置控制所述气体导入装置而向所述真空泵装置导入所述非活性气体。
20.在一个方式中,所述稳定速度包含第一稳定速度,该第一稳定速度是所述真空泵装置的当前的转速中的逆变器输出变得大于所述真空泵装置的轴输出时的速度,在所述真空泵装置的转速到达所述第一稳定速度之后,所述控制装置控制所述气体导入装置而向所述真空泵装置导入所述非活性气体。
21.在一个方式中,所述稳定速度包含第二稳定速度,该第二稳定速度是所述真空泵装置的转速为额定转速时的速度,在所述真空泵装置的转速到达所述第二稳定速度之后,所述控制装置控制所述气体导入装置而向所述真空泵装置导入所述非活性气体。
22.在一个方式中,所述气体导入装置具备:非活性气体供给线路,该非活性气体供给线路与所述真空泵装置连接;以及气体加热结构,该气体加热结构通过所述非活性气体供给线路对所述非活性气体进行加热。
23.在一个方式中,所述气体加热结构是对所述非活性气体供给线路进行加热的加热器。
24.在一个方式中,所述气体加热结构是由所述真空泵装置的排气口侧的压缩热加热的泵壳体。
25.在一个方式中,所述气体导入装置具备开闭阀,该开闭阀对非活性气体供给线路进行开闭,所述控制装置对所述开闭阀的开闭动作进行控制。
26.在一个方式中,所述气体导入装置具备流量传感器,该流量传感器对在非活性气体供给线路流动的非活性气体的流量进行检测,所述控制装置基于从所述流量传感器发送的流量信号对开闭阀的状态进行判断。
27.在一个方式中,所述气体导入装置具备开闭阀和流量传感器的组合,该开闭阀对非活性气体供给线路进行开闭,该流量传感器对在所述非活性气体供给线路流动的非活性气体的流量进行检测。
28.在一个方式中,所述气体导入装置具备:旁通线路,该旁通线路从非活性气体供给线路分支,并与所述真空泵装置连接;以及流量控制装置,该流量控制装置通过所述旁通线
路对导入所述真空泵装置的所述非活性气体的流量进行控制,所述控制装置执行第一导入工序,通过所述流量控制装置将包含零流量的第一流量的非活性气体导入所述真空泵装置,所述控制装置在执行所述第一导入工序且所述真空泵装置的转速到达所述稳定速度之后,执行第二导入工序,将大于所述第一流量的第二流量的非活性气体导入所述真空泵装置。
29.在一个方式中,所述流量控制装置具备开闭阀,该开闭阀对所述旁通线路进行开闭。
30.在一个方式中,所述流量控制装置具备流量调整阀或节流孔,该流量调整阀或节流孔安装于所述旁通线路。
31.发明的效果
32.真空排气方法是在真空泵装置的转速到达稳定速度之后向真空泵装置导入非活性气体的方法。因此,真空排气方法不仅能够抑制副生成物的生成,还能够缩短真空泵装置的启动所需的时间。而且,不会发生真空泵装置的转速无法到达额定转速这样的问题。
附图说明
33.图1是表示真空排气系统的一个实施方式的图。
34.图2是表示控制装置的动作流程的图。
35.图3是表示使开闭阀进行开闭动作的时刻的图。
36.图4是用于说明第一稳定速度的图。
37.图5是表示气体导入装置的其他实施方式的图。
38.图6是表示气体导入装置的另一实施方式图。
39.图7是表示气体导入装置的另一实施方式图。
40.图8是表示气体导入装置的另一实施方式图。
41.图9是表示气体导入装置的另一实施方式图。
42.图10是表示气体导入装置的另一实施方式图。
43.图11是表示气体加热结构的其他实施方式图。
44.符号说明
45.ds
ꢀꢀꢀꢀꢀ
真空排气系统
46.ch
ꢀꢀꢀꢀꢀ
真空腔室
47.dp
ꢀꢀꢀꢀꢀ
真空泵装置
48.bp
ꢀꢀꢀꢀꢀ
升压泵装置
49.bp1
ꢀꢀꢀꢀ
升压泵
50.bp2
ꢀꢀꢀꢀ
电动机
51.inv1
ꢀꢀꢀ
逆变器
52.mp
ꢀꢀꢀꢀꢀ
主泵装置
53.mp1
ꢀꢀꢀꢀ
主泵
54.mp2
ꢀꢀꢀꢀ
电动机
55.inv2
ꢀꢀꢀ
逆变器
56.ip
ꢀꢀꢀꢀꢀ
吸气口
57.ep
ꢀꢀꢀꢀꢀ
排气口
58.rt1
ꢀꢀꢀꢀ
转子
59.rt2
ꢀꢀꢀꢀ
转子
60.gi
ꢀꢀꢀꢀꢀ
气体导入装置
61.ct
ꢀꢀꢀꢀꢀ
控制装置
62.sl
ꢀꢀꢀꢀꢀ
非活性气体供给线路
63.is
ꢀꢀꢀꢀꢀ
气体供给源
64.vl1
ꢀꢀꢀꢀ
开闭阀
65.vl2
ꢀꢀꢀꢀ
开闭阀
66.tvl
ꢀꢀꢀꢀ
三通阀
67.or
ꢀꢀꢀꢀꢀ
节流孔
68.bl
ꢀꢀꢀꢀꢀ
旁通线路
69.fs
ꢀꢀꢀꢀꢀ
流量传感器
70.fc
ꢀꢀꢀꢀꢀ
质量流量传感器
71.ht
ꢀꢀꢀꢀꢀ
加热器
72.pc
ꢀꢀꢀꢀꢀ
泵壳体
具体实施方式
73.以下,参照附图,对本发明的实施方式进行说明。
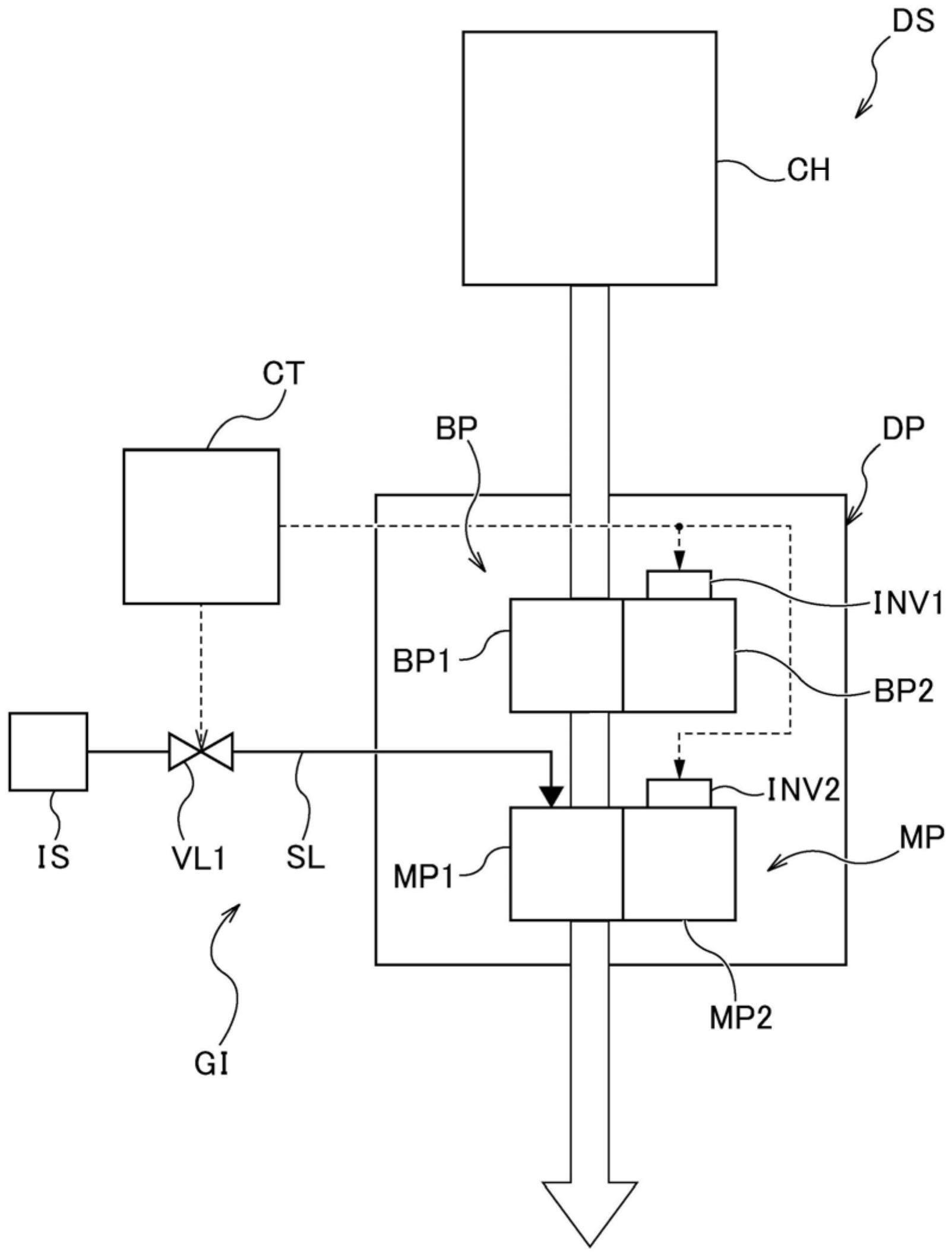
74.图1是表示真空排气系统的一个实施方式的图。如图1所示,真空排气系统ds具备:对在半导体制造工序中用于进行蚀刻、成膜等处理的真空腔室ch进行排气的真空泵装置dp、向真空泵装置dp导入非活性气体(例如,n2气体)的气体导入装置gi以及对真空泵装置dp的动作和气体导入装置gi的动作进行控制的控制装置ct。
75.真空腔室ch构成半导体制造装置(未图示)的一部分,包含生成副生成物的气体的处理气体被导入真空腔室ch内。真空泵装置dp与真空腔室ch连接。真空泵装置dp通过其驱动来对真空腔室ch进行排气。处理气体通过真空腔室ch的排气而被吸入真空泵装置dp。
76.在图1所示的实施方式中,真空泵装置dp具备两台真空泵装置(即,升压泵装置bp及主泵装置mp)。升压泵装置bp具备:升压泵bp1、对升压泵bp1进行驱动的电动机bp2以及作为电动机bp2的可变速构件的逆变器inv1。同样地,主泵装置mp具备:主泵mp1、对主泵mp1进行驱动的电动机mp2以及作为电动机mp2的可变速构件的逆变器inv2。在一个实施方式中,真空泵装置dp可以具备单独的泵装置,或者也可以具备三台以上的真空泵装置。
77.气体导入装置gi与真空泵装置dp连接。在图1所示的实施方式中,气体导入装置gi具备:与主泵装置mp的主泵mp1连接的非活性气体供给线路sl、通过非活性气体供给线路sl向主泵装置mp供给非活性气体的气体供给源is以及对非活性气体供给线路sl进行开闭的开闭阀vl1。在一个实施方式中,非活性气体供给线路sl也可以与升压泵装置bp的升压泵bp1连接。在其他实施方式中,非活性气体供给线路sl也可以与升压泵bp1和主泵mp1这两者连接。
78.控制装置ct与开闭阀vl1电连接,而对开闭阀vl1的开闭动作进行控制。作为开闭阀vl1的一例,能够列举出电磁阀。当控制装置ct关闭开闭阀vl1时,开闭阀vl1将非活性气
体从气体供给源is向主泵mp1的供给切断。当控制装置ct打开开闭阀vl1时,开闭阀vl1容许非活性气体从气体供给源is向主泵mp1的供给。
79.控制装置ct与逆变器inv1和逆变器inv2分别电连接,而对电动机bp2和电动机mp2的驱动动作进行控制。换言之,控制装置ct通过电动机bp2和电动机mp2对升压泵装置bp和主泵装置mp的运转进行控制。以下,在本明说明书中,将升压泵装置bp和主泵装置mp统称为真空泵装置dp。
80.当对真空腔室ch进行排气时,含有生成副生成物的气体的处理气体被吸入真空泵装置dp。如上所述,副生成物依存于压力(和温度)而生成。因此,为了抑制副生成物的生成,气体导入装置gi将非活性气体导入真空泵装置dp,从而使处理气体的压力降低。
81.但是,当从真空泵装置dp的起动时起导入非活性气体时,真空泵装置dp的消耗电力可能会变大,从而真空泵装置dp的转速可能不上升而停滞。作为结果,真空泵装置dp的启动可能需要非常多的时间、真空泵装置dp的转速可能难以到达额定转速。
82.因此,在本实施方式中,控制装置ct在使真空泵装置dp起动之后使真空泵装置dp的转速上升至规定的稳定速度,并在真空泵装置dp的转速到达稳定速度之后,控制气体导入装置gi,而向真空泵装置dp导入非活性气体。
83.在从真空泵装置dp的起动开始到真空泵装置dp的转速到达稳定速度为止的期间,控制装置ct不导入非活性气体,在真空泵装置dp的转速到达稳定速度之后,控制装置ct向真空泵装置dp导入非活性气体。通过像这样的动作,控制装置ct能够使真空泵装置dp的起动时不消耗不必要的电力,而使真空泵装置dp的转速顺畅地到达额定转速。作为结果,真空排气系统ds能够缩短真空泵装置dp的启动时间。进而,通过像这样的动作,真空排气系统ds能够实现非活性气体的使用量的削减。
84.图2是表示控制装置的动作流程的图。如图2的步骤s101所示,首先,控制装置ct使真空泵装置dp起动。之后,如步骤s102所示,使真空泵装置dp的转速上升至规定的稳定速度。该使转速上升的工序被称作上升工序。控制装置ct基于向真空泵装置dp供给的电力(即,电流、电压)来判断真空泵装置dp的转速。
85.图3是表示使开闭阀进行开闭动作的时刻的图。如图3所示,规定的稳定速度包含第一稳定速度和比第一稳定速度大的第二稳定速度。第一稳定速度是真空泵装置dp的当前的转速中的逆变器输出(电力)变得大于真空泵装置dp的轴输出时的速度。第二稳定速度是真空泵装置dp的转速为额定转速时的速度。
86.图4是用于说明第一稳定速度的图。如图4所示,吸气口ip与第一段的转子rt1之间的容积被定义为第一段容积v1,排气口ep与第二段的转子rt2之间的容积被定义为第二段容积v2。轴输出是将转子的旋转时产生的压缩动力(wc)和机械损失(f)合计而得到的输出。压缩动力(wc)能够由以下的数学式表示。压缩动力(wc)=σ(各段的容积vi
×
转速r
×
各段的压力差pi)
87.例如,在图4所示的实施方式中,压缩动力(wc)能够由以下的数学式表示。压缩动力(wc)=第一段容积v1×
转速r
×
(p1
out-p1
in
)+v2×r×
(p2
out-p2
in
)
88.机械损失(f)主要因真空泵装置dp的构成要素(例如,定时齿轮、轴承)的摩擦而产生,机械损失(f)与真空泵装置dp的转速成比例地增加。
89.如图2的步骤s103所示,控制装置ct在执行步骤s102之后,对真空泵装置dp的转速
是否到达规定的稳定速度(第一稳定速度或第二稳定速度)进行判断。在真空泵装置dp的转速没有到达规定的稳定速度的情况下(参照步骤s103的“否”),控制装置ct继续步骤s102。此时,控制装置ct继续开闭阀vl1的闭动作。
90.在真空泵装置dp的转速到达规定的稳定速度的情况下(参照步骤s103的“是”),如步骤s104所示,控制装置ct打开开闭阀vl1,而向真空泵装置dp导入非活性气体。该导入非活性气体的工序被称作气体导入工序。
91.在图3所示的实施方式中,在真空泵装置dp的转速到达第一稳定速度之后,控制装置ct打开气体导入装置gi的开闭阀vl1,而向真空泵装置dp导入非活性气体。在一个实施方式中,第一稳定速度被决定为充分地确保真空泵装置dp的排气侧的性能,不会发生转速停滞的转速(第二稳定速度(即,额定转速)的60%左右)。
92.在一个实施方式中,也可以是在真空泵装置dp的转速到达第二稳定速度(即,额定转速)之后,控制装置ct打开气体导入装置gi的开闭阀vl1,而向真空泵装置dp导入非活性气体。
93.图5是表示气体导入装置的其他实施方式的图。如图5所示,气体导入装置gi从非活性气体供给线路sl起分支,并具备与真空泵装置dp连接的旁通线路bl和通过旁通线路bl对被导入真空泵装置dp的非活性气体的流量进行控制的流量控制装置。
94.在图5所示的实施方式中,流量控制装置具备对旁通线路bl进行开闭的开闭阀vl2。控制装置ct与开闭阀vl2电连接,而对开闭阀vl2的开闭动作进行控制。开闭阀vl2可以具有与开闭阀vl1相同的结构。作为开闭阀vl2的一例,能够列举出电磁阀。
95.旁通线路bl具有比非活性气体供给线路sl的截面积小的截面积。通过这样的结构,通过旁通线路bl的非活性气体的流量(第一流量)小于通过非活性气体供给线路sl的非活性气体的流量(第二流量)。第一流量也可以包含对非活性气体通过旁通线路bl进行切断的零流量。因此,在开闭阀vl2处于闭状态时,通过旁通线路bl的非活性气体的流量为零。在开闭阀vl2处于开状态时,通过旁通线路bl的非活性气体的流量大于零且小于第二流量。
96.在图5所示的实施方式中,控制装置ct也可以在上述上升工序中执行通过旁通线路bl将第一流量的非活性气体导入真空泵装置dp的第一导入工序。在一个实施方式中,第一导入工序也可以在真空泵装置dp刚起动开始后就开始。在第一导入工序中,将开闭阀vl1维持为闭状态。
97.控制装置ct也可以在执行第一导入工序之后,在上述气体导入工序中将大于第一流量的第二流量的非活性气体导入真空泵装置dp(第二导入工序)。在第二导入工序中,控制装置ct将开闭阀vl1从闭状态切换为开状态。此时,控制装置ct可以关闭开闭阀vl2,或者也可以打开开闭阀vl2。通过打开开闭阀vl2,能够向真空泵装置dp导入更大流量的非活性气体。
98.图6是表示气体导入装置的另一实施方式的图。如图6所示,气体导入装置gi可以具备作为流量控制装置的三通阀tvl来代替开闭阀vl1和开闭阀vl2。在图6所示的实施方式中,三通阀tvl相当于开闭阀vl1和开闭阀vl2。
99.如图6所示,控制装置ct与三通阀tvl电连接,而对三通阀tvl的切换动作进行控制。更具体而言,控制装置ct使三通阀tvl动作(即,第一动作)而将非活性气体供给线路sl的上游侧和下游侧连接。在该情况下,气体供给源is和真空泵装置dp通过非活性气体供给
线路sl而连结。控制装置ct使三通阀tvl动作(即,第二动作)而将非活性气体供给线路sl的上游侧和旁通线路bl连接。在该情况下,气体供给源is和真空泵装置dp通过旁通线路bl而连结。
100.图6所示的实施方式中的真空排气系统ds也能够起到与图5所示的实施方式中的真空排气系统ds相同的效果。因此,控制装置ct在上述上升工序中使三通阀tvl进行第二动作,而将第一流量(在图6所示的实施方式中,零流量)的非活性气体通过旁通线路bl导入真空泵装置dp。控制装置ct在上述气体导入工序中使三通阀tvl进行第一动作,而将第二流量的非活性气体通过非活性气体供给线路sl导入真空泵装置dp。
101.图7是表示气体导入装置的另一实施方式的图。如图7所示,流量控制装置也可以具备安装于旁通线路bl的节流孔or。在图7所示的实施方式中,控制装置ct在上述上升工序中关闭开闭阀vl1,而将第一流量(在图7所示的实施方式中,大于零流量的流量)的非活性气体通过旁通线路bl导入真空泵装置dp。控制装置ct在上述气体导入工序中打开开闭阀vl1,而将第二流量的非活性气体通过非活性气体供给线路sl导入真空泵装置dp。此时,第一流量的非活性气体通过旁通线路bl被导入真空泵装置dp。
102.虽然未图示,但流量控制装置也可以具备流量调整阀来代替节流孔or。而且,根据需要,也可以将图5所示的实施方式、图6所示的实施方式以及图7所示的实施方式适当进行组合。例如,流量控制装置也可以具备图5所示的开闭阀vl2、图6所示的三通阀tvl以及图7所示的节流孔or(或流量调整阀)。
103.图8是表示气体导入装置的另一实施方式的图。如图8所示,气体导入装置gi也可以具备对在非活性气体供给线路sl流动的非活性气体的流量进行检测的流量传感器fs。流量传感器fs在非活性气体的流动方向上配置于开闭阀vl1的下游侧。
104.控制装置ct与流量传感器fs电连接,并基于从流量传感器fs发送的流量信号对通过流量传感器fs的非活性气体的流量进行测定。在图8所示的实施方式中,控制装置ct能够基于从流量传感器fs发送的流量信号对开闭阀vl1的状态(更具体而言,异常)进行判断。例如,控制装置ct在上述上升工序中,在通过流量传感器fs的非活性气体的流量大于规定的阈值(第一阈值)的情况下,控制装置ct可以决定为开闭阀vl1的异常。同样地,控制装置ct在上述气体导入工序中,在通过流量传感器fs的非活性气体的流量小于规定的阈值(第二阈值)的情况下,控制装置ct可以决定为开闭阀vl1的异常。
105.像这样,控制装置ct能够基于从流量传感器fs发送的流量信号来决定开闭阀vl1的异常。控制装置ct可以在决定为开闭阀vl1的异常的情况下发送警报。虽然未图示,但流量传感器fs也可以安装于旁通线路bl(参照图5、图6及图7)。
106.图9是表示气体导入装置的另一实施方式的图。如图9所示,气体导入装置gi也可以具备质量流量传感器fc。质量流量传感器fc是开闭阀vl1与流量传感器fs的组合。在图9所示的实施方式中,质量流量传感器fc具有在流量传感器内置有开闭阀的结构。控制装置ct与质量流量传感器fc电连接。控制装置ct能够使质量流量传感器fc动作,对非活性气体供给线路sl的开闭动作进行控制,并且基于从质量流量传感器fc发送的流量信号对通过质量流量传感器fc的非活性气体的流量进行测定。
107.图10是表示气体导入装置的另一实施方式的图。在图10所示的实施方式中,气体导入装置gi也可以具备通过非活性气体供给线路sl对非活性气体进行加热的气体加热结
构。如上所述,副生成物不仅依存于压力,还依存于温度而生成。因此,为了抑制副生成物的生成,气体导入装置gi还可以具备气体加热结构。当被气体加热结构加热后的非活性气体向真空泵装置dp供给时,抑制处理气体的温度降低。换言之,处理气体的温度上升。作为结果,抑制副生成物的生成。
108.如图10所示,气体加热结构是对非活性气体供给线路sl进行加热的加热器ht。加热器ht对非活性气体供给线路sl进行加热,从而通过加热后的非活性气体供给线路sl的非活性气体成为高温。作为结果,高温的非活性气体被向真空泵装置dp供给,从而抑制副生成物的生成。对非活性气体进行加热的工序被称作气体加热工序。
109.图11是表示气体加热结构的其他实施方式的图。如图11所示,气体加热结构是由真空泵装置dp(在图11所示的实施方式中,主泵装置mp)的排气口ep侧的压缩热加热的泵壳体pc。当气体通过真空泵装置dp的驱动而被压缩排出时,泵壳体pc(特别是,排气口ep侧)发热而成为高温。因此,非活性气体供给线路sl以与泵壳体pc接触的方式配置。
110.在图11所示的实施方式中,非活性气体供给线路sl绕设于泵壳体pc。通过这样的配置,非活性气体供给线路sl被泵壳体pc的热加热,从而通过加热后的非活性气体供给线路sl的非活性气体成为高温。作为结果,高温的非活性气体被向真空泵装置dp供给,从而抑制副生成物的生成。
111.图10所示的实施方式和图11所示的实施方式也可以组合。在该情况下,气体加热结构具有安装于非活性气体供给线路sl的加热器ht以及非活性气体供给线路sl绕设于泵壳体pc的结构。
112.上述的实施方式是以具有本发明所述的技术领域的通常的知识的人能够实施本发明为目的而记载的。上述实施方式的各种变形例只要是本领域技术人员就当然能够做成,本发明的技术思想也能够应用于其他实施方式。因此,本发明不限于所记载的实施方式,而应当按照由专利请求的范围所定义的技术思想的最大的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1