一种液压系统预警方法与流程
本发明涉及液压系统领域,特别是涉及一种液压系统预警方法。
背景技术:
1、液压系统是自动化设备中重要的组成部分;而在自动化设备在自动生产过程中,可能因为管路接头松动、阀体爆裂、密封圈破损等导致大流量漏油,从而导致液压系统效率过低而影响自动化设备的正常运行。
技术实现思路
1、为了克服现有技术中存在的不足,本发明提供了一种液压系统预警方法,通过对液压系统实际压力、驱动元件实际转速、执行元件实际速度进行监控,在液压系统执行动作时,能够及时对液压系统是否漏油而导致其效率异常进行判断预警,以避免液压系统在不稳定工况下运行。
2、为了达到上述目的,本发明采用如下技术方案来实现的:
3、一种液压系统预警方法,包括预警判断方法,所述预警判断方法包括:
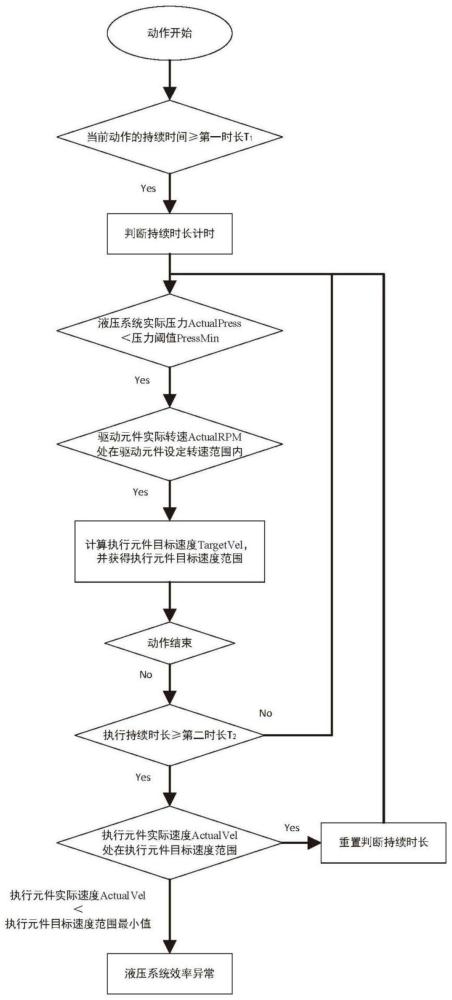
4、s1,获取液压系统实际压力actualpress,并判断液压系统实际压力actualpress是否小于压力阈值pressmin,若液压系统实际压力actualpress小于压力阈值pressmin,则执行s2;
5、s2,根据驱动元件设定转速setrpm和驱动元件设定转速负偏差,获得驱动元件设定转速范围最小值,根据驱动元件设定转速setrpm和驱动元件设定转速正偏差,获得驱动元件设定转速范围最大值,以获得驱动元件设定转速范围为驱动元件设定转速范围最小值到驱动元件设定转速范围最大值之间;
6、获取液压系统中驱动元件实际转速actualrpm,并判断驱动元件实际转速actualrpm是否处在驱动元件设定转速范围内,若驱动元件实际转速actualrpm在驱动元件设定转速范围内,则执行s3;
7、s3,根据液压系统中当前动作的执行元件参数,计算出执行元件目标速度targetvel;并根据执行元件目标速度targetvel和执行元件目标速度负偏差,获得执行元件目标速度范围最小值;
8、获取液压系统中当前动作的执行元件实际速度actualvel,并判断执行元件实际速度actualvel是否小于执行元件目标速度范围最小值,若执行元件实际速度actualvel小于执行元件目标速度范围最小值,则执行元件实际速度actualvel过低,液压系统效率异常。
9、具体的,所述驱动元件设定转速负偏差、所述驱动元件设定转速正偏差、所述执行元件目标速度负偏差根据使用需求设定,且所述驱动元件设定转速负偏差可以为0,则此时驱动元件设定转速setrpm即为驱动元件设定转速范围最小值;所述驱动元件设定转速正偏差可以为0,则此时驱动元件设定转速setrpm即为驱动元件设定转速范围最大值;所述执行元件目标速度负偏差可以为0,则此时执行元件目标速度targetvel即为执行元件目标速度范围最小值。
10、采用上述方法,在液压系统执行动作时,能够及时对液压系统效率是否异常进行判断预警,以避免液压系统在不稳定工况下运行;液压系统漏油是造成液压系统效率异常的原因之一,本方法也能有效对液压系统是否漏油进行检测预警,防止液压系统漏油发生。
11、进一步地,在所述s2中,所述驱动元件设定转速负偏差和所述驱动元件设定转速正偏差采用百分数,所述驱动元件设定转速负偏差为x1%,所述驱动元件设定转速正偏差为x2%,所述驱动元件设定转速范围最小值为setrpm*(1-x1%),所述驱动元件设定转速范围最大值为setrpm*(1+x2%);
12、在所述s3中,所述执行元件目标速度负偏差采用百分数,所述执行元件目标速度负偏差为y1%,所述执行元件目标速度范围最小值为targetvel*(1-y1%)。
13、采用上述方法,使得设置更加合理,便于操作人员操作;当然所述驱动元件设定转速负偏差和所述驱动元件设定转速正偏差也可以采用具体转速数值,所述执行元件目标速度负偏差也可以采用具体速度数值;
14、在一些实施例中,所述驱动元件设定转速负偏差x1%与所述驱动元件设定转速正偏差x2%相等。
15、进一步地,所述驱动元件为液压泵,所述执行元件为液压缸,在所述s3中,根据液压系统中当前动作的执行元件参数,计算出执行元件执行元件目标速度targetvel,包括:
16、a1,根据驱动元件设定转速范围以及驱动元件排量,计算得到驱动元件设定理论流量;
17、b1,根据动作对应液压缸类型,计算液压缸对应的液压缸腔体截面积;
18、c1,根据驱动元件设定理论流量和液压缸腔体截面积计算得到执行元件目标速度targetvel,
19、
20、在计算过程中需要对单位进行换算统一;具体的,
21、
22、括号内为对应单位。
23、进一步地,所述a1中,在所述驱动元件设定转速范围内选取一点作为驱动元件理论流量计算转速,并根据所述驱动元件理论流量计算转速和驱动元件排量计算得到驱动元件设定理论流量,公式如下:
24、驱动元件设定理论流量=驱动元件理论流量计算转速*
25、驱动元件排量。
26、在计算过程中需要对单位进行换算统一;具体的,
27、驱动元件设定理论流量(l/min)=
28、驱动元件理论流量计算转速(rpm)*驱动元件排量(cc)/1000,括号内为对应单位。
29、进一步地,选取驱动元件设定转速范围中的驱动元件设定转速范围最小值、或驱动元件设定转速setrpm、或驱动元件设定转速范围最大值作为所述驱动元件理论流量计算转速。
30、采用上述方法,使得所述执行元件目标速度targetvel的计算更加合理;优选的,选取驱动元件设定转速范围最小值作为所述驱动元件理论流量计算转速。
31、进一步地,所述驱动元件为液压泵,所述执行元件为液压缸,在所述s3中,当前动作的执行元件实际速度actualvel的获取通过检测传感器获得;
32、或者通过驱动元件实际转速actualrpm计算获得执行元件实际速度actualvel,包括:
33、a2,根据驱动元件实际转速actualrpm以及驱动元件排量,计算得到驱动元件实际理论流量,公式如下:
34、驱动元件实际理论流量=actualrpm*驱动元件排量;
35、b2,根据动作对应液压缸类型,计算液压缸对应的液压缸腔体截面积;
36、c2,根据驱动元件实际理论流量和液压缸腔体截面积计算得到执行元件实际速度actualvel,
37、
38、在计算过程中需要对单位进行换算统一;具体的,
39、
40、括号内为对应单位。
41、优选的,所述s3中,当前动作的执行元件实际速度actualvel的获取通过检测传感器获得,使得所述执行元件实际速度actualvel的值更加准确。
42、进一步地,若液压缸类型为无杆腔液压缸,则对应的液压缸腔体截面积的计算公式为:
43、液压缸腔体截面积=π*液压缸半径2;
44、若液压缸类型为有杆腔液压缸,则对应的液压缸腔体截面积的计算公式为:
45、液压缸腔体截面积=π*(液压缸半径-活塞杆半径)2。
46、采用上述方法,使得所述预警判断方法能够适用无杆腔液压缸和有杆腔液压缸,只需在执行前设置好液压系统执行动作对应执行元件的种类;
47、计算过程中需要对单位进行换算统一;具体的,液压缸半径、活塞杆半径的单位为mm,液压缸腔体截面积的单位为mm2。
48、进一步地,根据驱动元件设定转速百分比(%)获得所述驱动元件设定转速setrpm,公式如下:
49、setrpm=驱动元件设定转速百分比(%)*驱动元件最大转速。
50、采用上述方法,使得所述驱动元件设定转速setrpm的设置更加合理,便于操作人员操作。
51、进一步地,所述液压系统预警方法包括:
52、s0,在液压系统执行一个动作时,判断液压系统执行当前动作的持续时间是否大于等于第一时长t1,若液压系统执行当前动作的持续时间大于等于第一时长t1,则执行预警判断方法;
53、若液压系统执行当前动作的持续时间小于第一时长t1,则不执行预警判断方法。
54、液压系统在执行动作刚开始需要使得驱动元件启动运行、系统建立油压、执行元件启动运行;采用上述方法,使得预警判断在执行动作刚开始的第一时长t1内不执行预警判断方法,避免造成误判,影响正常运行;
55、具体的,所述第一时长t1等于1秒。
56、进一步地,在执行预警判断方法时,对预警判断方法的执行时间进行计时得到判断持续时间;
57、所述预警判断方法还包括:s2.5,在准备执行s3时或者执行s3中判断执行元件实际速度actualvel是否小于执行元件目标速度范围最小值前,判断判断持续时间是否大于等于第二时长t2,若判断持续时间大于等于第二时长t2,则继续执行s3;若判断持续时间小于第二时长t2,则执行s1。
58、采用上述方法,在判断持续时间大于等于第二时长t2后判断执行元件实际速度actualvel是否小于执行元件目标速度范围最小值,使得预警判断方法更加合理,避免造成误判,影响正常运行;
59、具体的,所述第一时长t2等于1秒。
60、进一步地,所述s2.5还包括:在判断判断持续时间是否大于等于第二时长t2前,判断液压系统当前动作是否结束,若当前动作未结束,则判断判断持续时间是否大于等于第二时长t2;
61、若当前动作结束,则不做处理。
62、采用上述方法,使得预警判断方法更加合理,避免造成误判,影响正常运行。
63、进一步地,所述s3中,根据执行元件目标速度targetvel和执行元件目标速度正偏差,获得执行元件目标速度范围最大值,以获得执行元件目标速度范围为执行元件目标速度范围最小值到执行元件目标速度范围最大值之间;若执行元件实际速度actualvel在执行元件目标速度范围内,则将判断持续时间重置,并执行s1。
64、采用上述方法,使得执行预警判断方法后,每经过第二时长t2,就会对该次第二时长t2内液压系统效率是否异常进行检测,使得所述预警判断方法更加合理。
65、进一步地,所述执行元件目标速度正偏差采用百分数,所述执行元件目标速度正偏差为y2%,所述执行元件目标速度范围最大值为targetvel*(1+y2%)。
66、采用上述方法,使得设置更加合理,便于操作人员操作;当然所述执行元件目标速度正偏差也可以采用具体速度数值;
67、在一些实施例中,所述执行元件目标速度负偏差y1%与执行元件目标速度正偏差y2%相等。
68、具体的,所述执行元件目标速度正偏差根据使用需求设定,且所述执行元件目标速度正偏差可以为0,则此时执行元件目标速度targetvel即为执行元件目标速度范围最大值。
69、进一步地,所述s1中,若液压系统实际压力actualpress大于等于压力阈值pressmin,则不做处理或者再次执行s1.
70、采用上述方法,使得所述预警判断方法更加合理。
71、进一步地,所述s2中,若驱动元件实际转速actualrpm不在驱动元件设定转速范围内,则不做处理或者再次执行s2或者再次执行s1。
72、采用上述方法,使得所述预警判断方法更加合理。
73、与现有技术相比,本发明具有如下有益效果:
74、(1)本发明的液压系统预警方法,其通过对液压系统实际压力、驱动元件实际转速、执行元件实际速度进行监控,在液压系统执行动作时,能够及时对液压系统是否漏油而导致其效率异常进行判断预警,以避免液压系统在不稳定工况下运行。
75、(2)本发明的液压系统预警方法,其设计合理。
- 还没有人留言评论。精彩留言会获得点赞!