自供油集成式调速系统的制作方法
[0001]
本实用新型涉及一种船用汽轮机、辅汽轮机,尤其是一种船用汽轮机、辅汽轮机的调速系统。
背景技术:
[0002]
近年随着自动化程度的要求与液压技术的提升,汽轮机调速系统已由曾经的机械系统向高机动性液压系统转变,其原理如图1所示,均采用由油站系统、蓄能器、调速器执行机构及相连管路等组成,其中执行机构与调节阀本体直接连接,油站系统与蓄能器分立布置在厂房。工作时,控制系统给伺服放大器一个阀位指令信号,此信号与位移传感器反馈给伺服放大器的当前阀位信号作比较,伺服放大器将此差值经运算放大后发送给电液转换器,由电液转换器控制油的流动方向从而控制阀门运行于某个位置。当失去控制信号时,电液转换器的机械偏置保证阀门关闭。
[0003]
船用汽轮机因空间紧张,原理相似的基础上,油站和蓄能器均独立集成化设计,布置在公共机架上。
[0004]
现有的船用调速系统的主要问题在于:空间逼仄狭窄,油站和蓄能器根据其各自结构特点适应性的安置于有限空间,增加了系统的复杂度;同时各设备之间使用直径很小的硬管,其内流体高压特点不利于汽轮机减振减噪;再者高压管路本身存在漏油的风险,不利于汽轮机的安全运行。
技术实现要素:
[0005]
为提高船用调速系统的集成化程度,增加设备的维修空间,本实用新型提出了一种自供油集成式调速系统,应用该系统后可取消机组液压油站、蓄能器及高压管路,同时取消大量高压油管路,大幅度增加了机组的维修空间和安全性。
[0006]
本实用新型采用的技术方案是:一种自供油集成式调速系统,包括电机泵组件、油缸组件、油箱阀组件、主阀块组件,所述电机泵组件、油缸组件、油箱阀组件集成于主阀块组件上形成集成化结构,并整体安装在机架上方,提供调阀控制功能;所述主阀块组件包括伺服阀、电磁换向阀,所述电机泵组件的动力输出端通过过滤器、单向阀后分成二路,一路直接连通油缸组件中的油缸的有杆腔,另一路经三通再分成二路,第一路经电磁换向阀、伺服阀、单向阀连通油缸的无杆腔,第二路经调压阀连通油缸的无杆腔,调压阀背压端还连接有电磁换向阀;所述油缸的活塞连接蒸汽阀门。
[0007]
进一步,所述蒸汽阀门上面设有线性位移传感器,所述伺服阀、电磁换向阀和线性位移传感器电连接deh。
[0008]
进一步,当系统需要阀门正常调节工作时,所述deh发出开启或关闭蒸汽阀门工作指令信号给控制器;所述控制器内经过与实际阀位比较后,向伺服阀发出指令信号,伺服阀将电气信号转换成液压信号并放大后,送到油缸相应的工作腔室,驱动油缸活塞、即蒸汽阀门移动。
[0009]
进一步,当蒸汽阀门移动时,所述蒸汽阀门带动线性位移传感器,由位移传感器产生位置信号,该信号反馈至控制器,直至与阀门阀位指令相平衡时,油缸地活塞停止运动,此时蒸汽阀门已经到达所需要的开度,完成电信号—液压力—机械位移的转换过程。
[0010]
本实用新型的有益效果是:
[0011]
本实用新型通过调速系统执行机构的泵控设计,减小液压油需求量;通过集成化设计,将蓄能器、微型电机等部件集成于主阀块组件,大幅度减小调速系统所占空间,体积减小60%,大幅度增加船用汽轮机的维修空间;同时可消除常规电动油泵、高压管路振动影响和安全隐患。
附图说明
[0012]
图1是现有的液压调速系统原理图;
[0013]
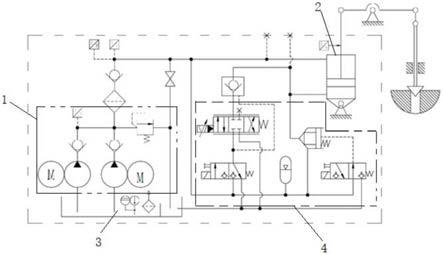
图2是本实用新型的自供油集成式调速系统图。
具体实施方式
[0014]
下面结合附图与实施例对本实用新型作进一步说明。
[0015]
如图2所示,一种自供油集成式调速系统,包括:电机泵组件1、油缸组件2、油箱阀组件3、主阀块组件4等,其中电机泵组件1、油缸组件2、油箱阀组件3集成于主阀块组件4上,各部件集成化,整体安装在机架上方,提供调阀控制功能。
[0016]
主阀块组件4包括电液转换器的伺服阀、电磁换向阀等。电机泵组件1的动力输出端通过过滤器、单向阀后分成二路,一路直接连通油缸组件2中的油缸的有杆腔,另一路经三通再分成二路,第一路经电磁换向阀、伺服阀、单向阀连通油缸的无杆腔,第二路经调压阀连通油缸的无杆腔,调压阀背压端还连接有电磁换向阀。油缸的活塞连接蒸汽阀门。
[0017]
蒸汽阀门上面设有线性位移传感器,伺服阀、电磁换向阀和线性位移传感器电连接deh(deh是指汽轮机数字电液控制系统,由计算机控制部分和eh液压执行机构部分组成)。
[0018]
系统需要阀门正常调节工作时,deh发出开启或关闭阀门工作指令给控制器;控制器内经过与实际阀位比较后,向执行器上的电液转换器的伺服阀发出指令信号,伺服阀将电气信号转换成液压信号并放大后,送到油缸相应的工作腔室,驱动油缸活塞、即阀门移动。阀门移动时,带动线性位移传感器,由位移传感器产生位置信号,该信号反馈至控制器,直至与阀位指令相平衡时活塞停止运动。此时蒸汽阀门已经到达了所需要的开度,完成了电信号—液压力—机械位移的转换过程。随着阀位指令信号变化,执行器不断地调节蒸汽门的开度,最终实现阀位控制。
[0019]
在控制逻辑上也进行了相应改进,通过伺服驱动器模拟命令输入的方式控制伺服电机,伺服电机驱动器的速度命令输入范围为-10~10v,代表-n~n r/min的转速命令。伺服驱动器通过编码器采集伺服电机转速以及压力传感器采集调节油压,并根据编码器和压力传感器反馈回来的伺服电机转速与油压数据进行分析,采用模糊pid算法控制,驱动伺服电机,提高伺服电机转速跟踪和动态适应能力,并通过控制伺服电机的转速以保持液压油站油压恒定。模糊—pid控制策略使得伺服电机在各种条件下的转速响应、稳态误差和超/欠调量等均有较大改善,使其具有更好的鲁棒性、抗干扰性和动态适应能力。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1