多速行星变速器的制作方法
多速行星变速器
1.相关申请的交叉引用
2.本技术涉及于2019年12月23日提交的名称为“多速行星变速器”、案卷号为at-p19018-us-pro的第62/952,672号美国临时专利申请,其全部内容通过引用并入本文。
技术领域
3.本公开涉及一种多速变速器,并且更具体地涉及一种多速变速器,包括多个行星齿轮组和多个选择性耦接器,以实现多个前进速比和多个后退速比。
背景技术:
4.多速变速器使用多个行星齿轮组、选择性耦接器、互连器和附加元件以实现多个前进和后退速比。示例性多速变速器在2014年8月12日提交的序列号为14/457,592、名称为“多速变速器”的第9,625,007号美国专利中公开,其全部公开内容通过引用并入本文。
技术实现要素:
5.本公开提供了一种多速变速器,包括多个行星齿轮组和多个选择性耦接器,以实现至少九个前进速比(其中输出部件与输入部件以相同方向旋转)以及至少九个后退速比(其中输出部件与输入部件以相反方向旋转)。多个行星齿轮组可包括第一行星齿轮组、第二行星齿轮组、第三行星齿轮组、第四行星齿轮组和第五行星齿轮组。多个选择性耦接器可包括多个离合器和多个制动器。在一个示例中,本公开提供了一种具有五个行星齿轮组和八个选择性耦接器的多速变速器。八个选择性耦接器可包括三个离合器和五个制动器。八个选择性耦接器可选择性啮合,以建立相同数量的前进速比和后退速比。八个选择性耦接器可选择性啮合,以建立至少九个前进速比和至少九个后退速比。
6.在整个本公开和权利要求书中的某些情况下,数字术语,如第一、第二、第三和第四,用于参考各种齿轮组、齿轮、齿轮组构件、互连器、选择性耦接器和其他构件。此类用途并不旨在表示构件的顺序。相反,数字术语用于帮助读者识别所引用的构件,不应狭义地解释为提供构件的特定顺序。例如,根据权利要求书的语言,附图中标识的第一行星齿轮组可支持权利要求书中列举的多个行星齿轮组中的任何一个,包括第一行星齿轮组、第二行星齿轮组、第三行星齿轮组、第四行星齿轮组和第五行星齿轮组。
7.在本公开的示例性实施例中,提供了一种变速器。变速器包括:至少一个固定部件;输入部件,其能相对于至少一个固定部件旋转;以及多个行星齿轮组,其操作地耦接到输入部件。多个行星齿轮组中的每一个包括第一齿轮组构件、第二齿轮组构件和第三齿轮组构件。多个行星齿轮组包括第一行星齿轮组、第二行星齿轮组、第三行星齿轮组、第四行星齿轮组和第五行星齿轮组。输入部件固定地耦接到第五行星齿轮组的第一齿轮组构件。变速器还包括:输出部件,其通过多个行星齿轮组操作地耦接到输入部件,并能相对于至少一个固定部件旋转,输出部件固定地耦接到第四行星齿轮组的第二齿轮组构件;第一互连器,其将第一行星齿轮组的第二齿轮组构件、第二行星齿轮组的第二齿轮组构件和第三行
星齿轮组的第三齿轮组构件固定地耦接在一起;第二互连器,其将第一行星齿轮组的第三齿轮组构件和第二行星齿轮组的第一齿轮组构件固定地耦接在一起;第三互连器,其将第三行星齿轮组的第二齿轮组构件和第四行星齿轮组的第三齿轮组构件固定地耦接在一起;第四互连器,其将第三行星齿轮组的第一齿轮组构件和第四行星齿轮组的第一齿轮组构件固定地耦接在一起;第五互连器,其将第五行星齿轮组的第三齿轮组构件和第一行星齿轮组的第一齿轮组构件固定地耦接在一起;以及多个选择性耦接器。多个选择性耦接器包括:第一选择性耦接器,第一选择性耦接器在啮合时将第五行星齿轮组的第三齿轮组构件和第一行星齿轮组的第一齿轮组构件固定地耦接到第三行星齿轮组的第一齿轮组构件和第四行星齿轮组的第一齿轮组构件;第二选择性耦接器,第二选择性耦接器在啮合时将第五行星齿轮组的第三齿轮组构件和第一行星齿轮组的第一齿轮组构件固定地耦接到第三行星齿轮组的第二齿轮组构件和第四行星齿轮组的第三齿轮组构件;第三选择性耦接器,第三选择性耦接器在啮合时将第一行星齿轮组的第三齿轮组构件和第二行星齿轮组的第一齿轮组构件固定地耦接到至少一个固定部件;第四选择性耦接器,第四选择性耦接器在啮合时将第一行星齿轮组的第二齿轮组构件、第二行星齿轮组的第二齿轮组构件和第三行星齿轮组的第三齿轮组构件固定地耦接到至少一个固定部件;第五选择性耦接器,第五选择性耦接器在啮合时将第三行星齿轮组的第二齿轮组构件和第四行星齿轮组的第三齿轮组构件固定地耦接到至少一个固定部件;第六选择性耦接器,第六选择性耦接器在啮合时将第二行星齿轮组的第三齿轮组构件固定地耦接到至少一个固定部件;第七选择性耦接器,第七选择性耦接器在啮合时将输入部件固定地耦接到第五行星齿轮组的第三齿轮组构件和第一行星齿轮组的第一齿轮组构件;以及第八选择性耦接器,第八选择性耦接器在啮合时将第五行星齿轮组的第二齿轮组构件固定地耦接到至少一个固定部件。
8.在其示例中,第一行星齿轮组、第二行星齿轮组、第三行星齿轮组、第四行星齿轮组和第五行星齿轮组中的每一者是简单行星齿轮组。在其变体中,第一行星齿轮组的第一齿轮组构件是第一太阳齿轮,第二行星齿轮组的第一齿轮组构件是第二太阳齿轮,第三行星齿轮组的第一齿轮组构件是第三太阳齿轮,第四行星齿轮组的第一齿轮组构件是第四太阳齿轮,第五行星齿轮组的第一齿轮组构件是第五太阳齿轮;第一行星齿轮组的第二齿轮组构件是第一行星架,第二行星齿轮组的第二齿轮组构件是第二行星架,第三行星齿轮组的第二齿轮组构件是第三行星架,第四行星齿轮组的第二齿轮组构件是第四行星架,第五行星齿轮组的第二齿轮组构件是第五行星架;以及第一行星齿轮组的第三齿轮组构件是第一齿圈,第二行星齿轮组的第三齿轮组构件是第二齿圈,第三行星齿轮组的第三齿轮组构件是第三齿圈,第四行星齿轮组的第三齿轮组构件是第四齿圈,以及第五行星齿轮组的第三齿轮组构件是第五齿圈。
9.在其另一示例中,至少一个固定部件包括壳体,壳体具有第一端和第二端,其中:输入部件能在壳体的第一端近侧通入该第一端;输出部件能在壳体的第二端近侧通入该第二端;第一行星齿轮组、第二行星齿轮组、第三行星齿轮组和第四行星齿轮组位于第五行星齿轮组和壳体的第二端之间;以及第五行星齿轮组位于壳体的第一端和第一行星齿轮组、第二行星齿轮组、第三行星齿轮组以及第四行星齿轮组之间。在其变体中,第一行星齿轮组位于第五行星齿轮组和第二行星齿轮组之间;第二行星齿轮组位于第一行星齿轮组和第三行星齿轮组之间;第三行星齿轮组位于第二行星齿轮组和第四行星齿轮组之间;以及第四
行星齿轮组位于第三行星齿轮组和壳体的第二端之间。
10.在其进一步的示例中,多个选择性耦接器选择性地啮合在多个组合中,以在输入部件和输出部件之间建立至少九个前进速比和至少九个后退速比,多个组合中的每一个组合使多个选择性耦接器中的至少三个啮合。
11.在其又一示例中,多个选择性耦接器选择性地啮合在多个组合中,以在输入部件和输出部件之间建立第一数量的前进速比和第二数量的后退速比。多个组合中的每一个组合使多个选择性耦接器中的至少三个啮合,第二数量等于第一数量。
12.在本公开的另一示例性实施例中,提供了一种变速器。变速器包括:至少一个固定部件;输入部件,其能相对于至少一个固定部件旋转;以及多个行星齿轮组,其操作地耦接到输入部件。多个行星齿轮组中的每一个包括第一齿轮组构件、第二齿轮组构件和第三齿轮组构件。多个行星齿轮组包括第一行星齿轮组、第二行星齿轮组、第三行星齿轮组、第四行星齿轮组和第五行星齿轮组。第一行星齿轮组、第二行星齿轮组、第三行星齿轮组、第四行星齿轮组和第五行星齿轮组中的每一者是简单行星齿轮组。输入部件固定地耦接到多个行星齿轮组中的仅一个。变速器还包括:输出部件,其通过多个行星齿轮组操作地耦接到输入部件,并能相对于至少一个固定部件旋转;以及多个选择性耦接器,其操作地耦接到多个行星齿轮组。多个选择性耦接器选择性地啮合在多个组合中,以在输入部件和输出部件之间建立第一数量的前进速比和第二数量的后退速比,多个选择性耦接器包括第三数量的制动器和第四数量的离合器,第四数量比第三数量少两个。
13.在其示例中,第二数量等于第一数量。在其变体中,多个组合中的每一个组合使多个选择性耦接器中的三个啮合。
14.在其另一示例中,输入部件固定地耦接到第五行星齿轮组的第一齿轮组构件,输出部件固定地耦接到第四行星齿轮组的第二齿轮组构件。
15.在其进一步的示例中,变速器还包括:第一互连器,其将第一行星齿轮组的第二齿轮组构件、第二行星齿轮组的第二齿轮组构件和第三行星齿轮组的第三齿轮组构件固定地耦接在一起;第二互连器,其将第一行星齿轮组的第三齿轮组构件和第二行星齿轮组的第一齿轮组构件固定地耦接在一起;第三互连器,其将第三行星齿轮组的第二齿轮组构件和第四行星齿轮组的第三齿轮组构件固定地耦接在一起;第四互连器,其将第三行星齿轮组的第一齿轮组构件和第四行星齿轮组的第一齿轮组构件固定地耦接在一起;以及第五互连器,其将第五行星齿轮组的第三齿轮组构件和第一行星齿轮组的第一齿轮组构件固定地耦接在一起。
16.在其又一示例中,多个选择性耦接器包括:第一选择性耦接器,第一选择性耦接器在啮合时将第五行星齿轮组的第三齿轮组构件和第一行星齿轮组的第一齿轮组构件固定地耦接到第三行星齿轮组的第一齿轮组构件和第四行星齿轮组的第一齿轮组构件;第二选择性耦接器,第二选择性耦接器在啮合时将第五行星齿轮组的第三齿轮组构件和第一行星齿轮组的第一齿轮组构件固定地耦接到第三行星齿轮组的第二齿轮组构件和第四行星齿轮组的第三齿轮组构件;第三选择性耦接器,第三选择性耦接器在啮合时将第一行星齿轮组的第三齿轮组构件和第二行星齿轮组的第一齿轮组构件固定地耦接到至少一个固定部件;第四选择性耦接器,第四选择性耦接器在啮合时将第一行星齿轮组的第二齿轮组构件、第二行星齿轮组的第二齿轮组构件和第三行星齿轮组的第三齿轮组构件固定地耦接到至
少一个固定部件;第五选择性耦接器,第五选择性耦接器在啮合时将第三行星齿轮组的第二齿轮组构件和第四行星齿轮组的第三齿轮组构件固定地耦接到至少一个固定部件;第六选择性耦接器,第六选择性耦接器在啮合时将第二行星齿轮组的第三齿轮组构件固定地耦接到至少一个固定部件;第七选择性耦接器,第七选择性耦接器在啮合时将输入部件固定地耦接到第五行星齿轮组的第三齿轮组构件和第一行星齿轮组的第一齿轮组构件;以及第八选择性耦接器,第八选择性耦接器在啮合时将第五行星齿轮组的第二齿轮组构件固定地耦接到至少一个固定部件。
17.在其又一示例中,第一行星齿轮组的第一齿轮组构件是第一太阳齿轮,第二行星齿轮组的第一齿轮组构件是第二太阳齿轮,第三行星齿轮组的第一齿轮组构件是第三太阳齿轮,第四行星齿轮组的第一齿轮组构件是第四太阳齿轮,第五行星齿轮组的第一齿轮组构件是第五太阳齿轮;第一行星齿轮组的第二齿轮组构件是第一行星架,第二行星齿轮组的第二齿轮组构件是第二行星架,第三行星齿轮组的第二齿轮组构件是第三行星架,第四行星齿轮组的第二齿轮组构件是第四行星架,第五行星齿轮组的第二齿轮组构件是第五行星架;以及第一行星齿轮组的第三齿轮组构件是第一齿圈,第二行星齿轮组的第三齿轮组构件是第二齿圈,第三行星齿轮组的第三齿轮组构件是第三齿圈,第四行星齿轮组的第三齿轮组构件是第四齿圈,以及第五行星齿轮组的第三齿轮组构件是第五齿圈。
18.在其又一示例中,至少一个固定部件包括壳体。壳体具有第一端和第二端。输入部件能在壳体的第一端近侧进入该第一端。输出部件能在壳体的第二端近侧进入该第二端。第一行星齿轮组、第二行星齿轮组、第三行星齿轮组和第四行星齿轮组位于第五行星齿轮组和壳体的第二端之间。第五行星齿轮组位于壳体的第一端和第一行星齿轮组、第二行星齿轮组、第三行星齿轮组以及第四行星齿轮组之间。在其变体中,第一行星齿轮组位于第五行星齿轮组和第二行星齿轮组之间;第二行星齿轮组位于第一行星齿轮组和第三行星齿轮组之间;第三行星齿轮组位于第二行星齿轮组和第四行星齿轮组之间;以及第四行星齿轮组位于第三行星齿轮组和壳体的第二端之间。
19.在本公开的进一步示例性实施例中,提供了一种变速器。变速器包括:至少一个固定部件;输入部件,其能相对于至少一个固定部件旋转;以及多个行星齿轮组,其操作地耦接到输入部件。多个行星齿轮组中的每一个包括第一齿轮组构件、第二齿轮组构件和第三齿轮组构件。多个行星齿轮组包括第一行星齿轮组、第二行星齿轮组、第三行星齿轮组、第四行星齿轮组和第五行星齿轮组。第一行星齿轮组、第二行星齿轮组、第三行星齿轮组、第四行星齿轮组和第五行星齿轮组中的每一者是简单行星齿轮组。变速器还包括:输出部件,其通过多个行星齿轮组操作地耦接到输入部件,并能相对于至少一个固定部件旋转;以及多个选择性耦接器,其操作地耦接到多个行星齿轮组。多个选择性耦接器选择性地啮合在多个组合中,以在输入部件和输出部件之间建立第一数量的前进速比和第二数量的后退速比。多个选择性耦接器包括第三数量的制动器和第四数量的离合器。第三数量是奇数并且比第四数量多两个。
20.在其示例中,第二数量等于第一数量。在其变体中,多个组合中的每一个组合使多个选择性耦接器中的三个啮合。
21.在其另一示例中,输入部件固定地耦接到第五行星齿轮组的第一齿轮组构件,输出部件固定地耦接到第四行星齿轮组的第二齿轮组构件。
22.在其进一步的示例中,变速器还包括:第一互连器,其将第一行星齿轮组的第二齿轮组构件、第二行星齿轮组的第二齿轮组构件和第三行星齿轮组的第三齿轮组构件固定地耦接在一起;第二互连器,其将第一行星齿轮组的第三齿轮组构件和第二行星齿轮组的第一齿轮组构件固定地耦接在一起;第三互连器,其将第三行星齿轮组的第二齿轮组构件和第四行星齿轮组的第三齿轮组构件固定地耦接在一起;第四互连器,其将第三行星齿轮组的第一齿轮组构件和第四行星齿轮组的第一齿轮组构件固定地耦接在一起;以及第五互连器,其将第五行星齿轮组的第三齿轮组构件和第一行星齿轮组的第一齿轮组构件固定地耦接在一起。
23.在其又一示例中,多个选择性耦接器包括:第一选择性耦接器,第一选择性耦接器在啮合时将第五行星齿轮组的第三齿轮组构件和第一行星齿轮组的第一齿轮组构件固定地耦接到第三行星齿轮组的第一齿轮组构件和第四行星齿轮组的第一齿轮组构件;第二选择性耦接器,第二选择性耦接器在啮合时将第五行星齿轮组的第三齿轮组构件和第一行星齿轮组的第一齿轮组构件固定地耦接到第三行星齿轮组的第二齿轮组构件和第四行星齿轮组的第三齿轮组构件;第三选择性耦接器,第三选择性耦接器在啮合时将第一行星齿轮组的第三齿轮组构件和第二行星齿轮组的第一齿轮组构件固定地耦接到至少一个固定部件;第四选择性耦接器,第四选择性耦接器在啮合时将第一行星齿轮组的第二齿轮组构件、第二行星齿轮组的第二齿轮组构件和第三行星齿轮组的第三齿轮组构件固定地耦接到至少一个固定部件;第五选择性耦接器,第五选择性耦接器在啮合时将第三行星齿轮组的第二齿轮组构件和第四行星齿轮组的第三齿轮组构件固定地耦接到至少一个固定部件;第六选择性耦接器,第六选择性耦接器在啮合时将第二行星齿轮组的第三齿轮组构件固定地耦接到至少一个固定部件;第七选择性耦接器,第七选择性耦接器在啮合时将输入部件固定地耦接到第五行星齿轮组的第三齿轮组构件和第一行星齿轮组的第一齿轮组构件;以及第八选择性耦接器,第八选择性耦接器在啮合时将第五行星齿轮组的第二齿轮组构件固定地耦接到至少一个固定部件。
24.在其又一示例中,第一行星齿轮组的第一齿轮组构件是第一太阳齿轮,第二行星齿轮组的第一齿轮组构件是第二太阳齿轮,第三行星齿轮组的第一齿轮组构件是第三太阳齿轮,第四行星齿轮组的第一齿轮组构件是第四太阳齿轮,第五行星齿轮组的第一齿轮组构件是第五太阳齿轮;第一行星齿轮组的第二齿轮组构件是第一行星架,第二行星齿轮组的第二齿轮组构件是第二行星架,第三行星齿轮组的第二齿轮组构件是第三行星架,第四行星齿轮组的第二齿轮组构件是第四行星架,第五行星齿轮组的第二齿轮组构件是第五行星架;以及第一行星齿轮组的第三齿轮组构件是第一齿圈,第二行星齿轮组的第三齿轮组构件是第二齿圈,第三行星齿轮组的第三齿轮组构件是第三齿圈,第四行星齿轮组的第三齿轮组构件是第四齿圈,以及第五行星齿轮组的第三齿轮组构件是第五齿圈。
25.在其又一示例中,至少一个固定部件包括壳体。壳体具有第一端和第二端。输入部件能在壳体的第一端近侧进入该第一端。输出部件能在壳体的第二端近侧进入该第二端。第一行星齿轮组、第二行星齿轮组、第三行星齿轮组和第四行星齿轮组位于第五行星齿轮组和壳体的第二端之间。第五行星齿轮组位于壳体的第一端和第一行星齿轮组、第二行星齿轮组、第三行星齿轮组以及第四行星齿轮组之间。在其变体中,第一行星齿轮组位于第五行星齿轮组和第二行星齿轮组之间;第二行星齿轮组位于第一行星齿轮组和第三行星齿轮
组之间;第三行星齿轮组位于第二行星齿轮组和第四行星齿轮组之间;以及第四行星齿轮组位于第三行星齿轮组和壳体的第二端之间。
附图说明
26.通过参考以下结合附图对示例性实施例的描述,本公开的上述以及其它特征和优点以及实现它们的方式将变得更加显而易见并且将更好地被理解,在附图中:
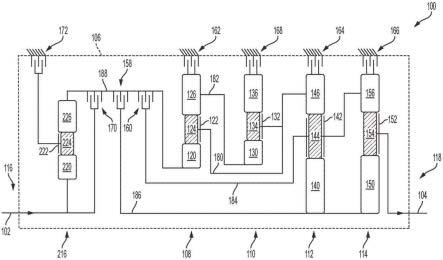
27.图1是包括五个行星齿轮组和八个选择性耦接器的示例性多速变速器的示意图;以及
28.图2是示出图1的八个选择性耦接器的选择性啮合以提供图1的多速变速器的九个前进传动比或速比和九个后退传动比或速比的真值表。
29.相应的附图标记在整个附图中表示相应的部分。在本文中阐述的例证说明了本发明的示例性实施例,并且这样的例证不应被解释为以任何方式限制本发明的范围。
具体实施方式
30.为了促进对本公开的原理的理解,现在参考附图中所示的实施例,实施例描述如下。下面公开的实施例不旨在穷尽或将本公开限制为以下详细描述中公开的精确形式。相反,选择和描述实施例,使得本领域技术人员可以利用它们的教导。因此,不旨在由此限制本公开的范围。相应的附图标记在整个附图中表示相应的部分。
31.在公开的变速器实施例中,公开了选择性耦接器。选择性耦接器是一种装置,可致动该装置将两个或更多个构件固定地耦接在一起。当选择性耦接器处于啮合配置时,选择性耦接器固定地耦接两个或更多个构件以作为整体一起旋转。此外,当选择性耦接器处于脱离配置中时,两个或更多个构件可相对彼此旋转。术语“耦接”、“被耦接”、“耦接器”及其变体用于包括其中两个或更多个构件处于直接物理接触的布置以及其中两个或更多个构件彼此不直接接触(例如,构件经由至少第三构件“被耦接”)但仍然相互配合或相互作用的布置两者。
32.第一示例性选择性耦接器是离合器。离合器在啮合配置中将两个或更多个旋转构件彼此耦接,使得两个或更多个旋转构件作为整体一起旋转,并且在脱离位置中允许两个或更多个旋转构件之间的相对旋转。示例性离合器可以是可换档摩擦锁定多盘离合器、可换档形式锁定爪或锥形离合器、湿式离合器或任何其它已知形式的离合器。
33.第二示例性选择性耦接器是制动器。制动器在啮合配置中将一个或多个可旋转构件耦接到固定构件以将该一个或多个可旋转构件相对于该固定构件保持静止,并且在脱离配置中允许该一个或多个构件相对于该固定构件旋转。示例性制动器可以被配置为可换档摩擦锁定盘式制动器、可换档摩擦锁定带式制动器、可换档形式锁定爪或锥形制动器或者任何其它已知形式的制动器。
34.选择性耦接器可以是主动控制装置或被动装置。示例性主动控制装置包括液压致动的离合器或制动元件以及电致动的离合器或制动元件。有关用于控制选择性耦接器的系统和方法的附加细节在上述合并的第9,625,007号美国专利中被公开。
35.除了通过选择性耦接器进行耦接外,所公开的变速器实施例的各种构件可以在整个所公开的变速器操作中连续固定地耦接在一起。构件可以永久或可拆卸地固定地耦接在
一起。构件可以通过花键连接、压装、紧固件、焊接、整体件的机械加工或成型的功能部分或者连接构件的其它合适的方法固定地耦接在一起。
36.公开的变速器实施例包括多个行星齿轮组。每个行星齿轮组包括至少四个构件:太阳齿轮;齿圈;多个行星齿轮;以及可旋转地耦接到行星齿轮并承载行星齿轮的行星架。在简单行星齿轮组的情况下,太阳齿轮的轮齿与行星齿轮的轮齿互相啮合,而行星齿轮的轮齿又依次与齿圈的轮齿互相啮合。这些构件中的每一个也可以称为齿轮组构件。对于本领域技术人员来说,显而易见的是,一些行星齿轮组可能包括比明确标识的构件更多的构件。例如,一个或多个行星齿轮组可能包括两组行星齿轮。第一组行星齿轮可与太阳齿轮互相啮合,而第二组行星齿轮与第一组行星齿轮和齿圈互相啮合。两组行星齿轮均由行星架承载。
37.当一个或多个构件固定地耦接在一起时,一个或多个旋转构件,诸如轴、鼓和其他构件,可统称为互连器。互连器还可以固定地耦接到一个或多个齿轮组构件和/或一个或多个选择性耦接器。
38.公开的变速器实施例的输入部件通过原动机旋转。示例性原动机包括内燃机、电动机、混合动力系统和其它合适的动力系统。在一个实施例中,原动机通过离合器和/或变矩器间接旋转输入部件。公开的变速器实施例的输出部件将可旋转动力提供到一个或多个工作构件。示例性工作构件包括机动车辆的一个或多个驱动轮、动力输出轴、泵和其它合适的装置。输出部件基于变速器的齿轮组构件和选择性耦接器的互连进行旋转。通过改变齿轮组构件和选择性耦接器的互连,输出部件的转速可以与输入部件的转速不同。
39.公开的变速器实施例能够将扭矩从输入部件传递到输出部件,并以相对于输入部件的至少九个前进传动比或速比(说明性地,九个前进传动比或速比),以及相对于输入部件的至少九个后退传动比或速比(说明性地,九个后退传动比或速比)旋转输出部件。本文公开的架构可用于基于所使用的齿轮组的特性实现各种传动比。示例性特性包括各自的齿轮直径、轮齿齿数和各种齿轮的配置。
40.图1是多速变速器100的示意表示。多速变速器100包括输入部件102和输出部件104。输入部件102和输出部件104中的每一个相对于至少一个固定部件106是可旋转的。示例性输入部件102是输入轴或其它合适的可旋转构件。示例性输出部件104是输出轴或其他适当的可旋转构件。示例性固定部件106是多速变速器100的壳体。该壳体可以包括耦接在一起的多个构件。
41.多速变速器100包括多个行星齿轮组(说明性地,第一行星齿轮组108、第二行星齿轮组110、第三行星齿轮组112、第四行星齿轮组114和第五行星齿轮组216)。在一个实施例中,可包括附加行星齿轮组。此外,尽管第一行星齿轮组108、第二行星齿轮组110、第三行星齿轮组112、第四行星齿轮组114和第五行星齿轮组216被示为简单行星齿轮组,但是可以预期,在一些实施例中可以包括复合行星齿轮组。
42.在一个实施例中,多速变速器100如图1所示布置,其中第五行星齿轮组216位于第一位置或第一端116(输入部件102在该第一位置或第一端处进入固定部件106)与第一行星齿轮组108之间,第一行星齿轮组108位于第五行星齿轮组216和第二行星齿轮组110之间,第二行星齿轮组110位于第一行星齿轮组108和第三行星齿轮组112之间,第三行星齿轮组112位于第二行星齿轮组110和第四行星齿轮组114之间,第四行星齿轮组114位于第三行星
齿轮组112和输出部件104离开固定部件106的第二位置或第二端118之间。在替代实施例中,第一行星齿轮组108、第二行星齿轮组110、第三行星齿轮组112、第四行星齿轮组114和第五行星齿轮组216以相对于位置116和位置118的任何顺序布置。在实施例中,第一行星齿轮组108、第二行星齿轮组110、第三行星齿轮组112、第四行星齿轮组114和第五行星齿轮组216中的每一个轴向对齐。在一个示例中,输入部件102和输出部件104还与第一行星齿轮组108、第二行星齿轮组110、第三行星齿轮组112、第四行星齿轮组114和第五行星齿轮组216轴向对齐。在替代实施例中,输入部件102、输出部件104、第一行星齿轮组108、第二行星齿轮组110、第三行星齿轮组112、第四行星齿轮组114和第五行星齿轮组216中的一个或多个偏移,且未与其余行星齿轮组轴向对齐。
43.第一行星齿轮组108包括太阳齿轮120、支撑多个行星齿轮124的行星架122和齿圈126。第二行星齿轮组110包括太阳齿轮130、支撑多个行星齿轮134的行星架132和齿圈136。第三行星齿轮组112包括太阳齿轮140、支撑多个行星齿轮144的行星架142和齿圈146。第四行星齿轮组114包括太阳齿轮150、支撑多个行星齿轮154的行星架152和齿圈156。第五行星齿轮组216包括太阳齿轮220、支撑多个行星齿轮224的行星架222和齿圈226。
44.多速变速器100还包括多个选择性耦接器(说明性地,第一选择性耦接器158、第二选择性耦接器160、第三选择性耦接器162、第四选择性耦接器164、第五选择性耦接器166、第六选择性耦接器168、第七选择性耦接器170和第八选择性耦接器172)。在所示实施例中,第一选择性耦接器158、第二选择性耦接器160和第七选择性耦接器170是离合器,第三选择性耦接器162、第四选择性耦接器164、第五选择性耦接器166、第六选择性耦接器168和第八选择性耦接器172是制动器。离合器和制动器相对于多个行星齿轮组的轴向位置可以从所示的轴向位置改变。
45.多速变速器100包括说明性地示出为固定地耦接在一起的多个构件。输入部件102固定地耦接到第五行星齿轮组216的太阳齿轮220和第七选择性耦接器170。输出部件104固定地耦接到第四行星齿轮组114的行星架152。第一行星齿轮组108的行星架122固定地耦接到第二行星齿轮组110的行星架132和第三行星齿轮组112的齿圈146。第一行星齿轮组108的齿圈126固定地耦接到第二行星齿轮组110的太阳齿轮130和第三选择性耦接器162。第二行星齿轮组110的齿圈136固定地耦接到第六选择性耦接器168。第三行星齿轮组112的太阳齿轮140固定地耦接到第四行星齿轮组114的太阳齿轮150和第一选择性耦接器158。第三行星齿轮组112的行星架142固定地耦接到第四行星齿轮组114的齿圈156和第二选择性耦接器160。第四行星齿轮组114的齿圈156也固定地耦接到第五选择性耦接器166。第五行星齿轮组216的行星架222固定地耦接到第八选择性耦接器172。第五行星齿轮组216的齿圈226固定地耦接到第一选择性耦接器158、第二选择性耦接器160、第七选择性耦接器170和第一行星齿轮组108的太阳齿轮120。在替代实施例中,固定地耦接在一起的一个或多个构件通过一个或多个选择性耦接器选择性耦接在一起。
46.多速变速器100可以被描述为具有六个互连器。输入部件102是第一互连器,其既向多速变速器100提供输入扭矩,又固定地耦接第五行星齿轮组216的太阳齿轮220和第七选择性耦接器170。第二互连器180固定地耦接第一行星齿轮组108的行星架122、第二行星齿轮组110的行星架132和第三行星齿轮组112的齿圈146。第三互连器182将第一行星齿轮组108的齿圈126固定地耦接到第二行星齿轮组110的太阳齿轮130。第四互连器184固定地
耦接第四行星齿轮组114的齿圈156、第三行星齿轮组112的行星架142和第二选择性耦接器160。第五互连器186固定地耦接第三行星齿轮组112的太阳齿轮140、第四行星齿轮组114的太阳齿轮150和第一选择性耦接器158。第六互连器188固定地耦接第一行星齿轮组108的太阳齿轮120、第五行星齿轮组216的齿圈226、第一选择性耦接器158、第二选择性耦接器160和第七选择性耦接器170。
47.多速变速器100还包括说明性地示出为通过选择性耦接器选择性地耦接在一起的多个构件。第一选择性耦接器158在啮合时将第一行星齿轮组108的太阳齿轮120、第五行星齿轮组216的齿圈226、第二选择性耦接器160和第七选择性耦接器170固定地耦接到第三行星齿轮组112的太阳齿轮140和第四行星齿轮组114的太阳齿轮150。当第一选择性耦接器158脱离时,第一行星齿轮组108的太阳齿轮120、第五行星齿轮组216的齿圈226可相对于第三行星齿轮组112的太阳齿轮140和第四行星齿轮组114的太阳齿轮150旋转。
48.第二选择性耦接器160在啮合时将第一行星齿轮组108的太阳齿轮120、第五行星齿轮组216的齿圈226、第一选择性耦接器158和第七选择性耦接器170固定地耦接到第三行星齿轮组112的行星架142和第四行星齿轮组114的齿圈156。当第二选择性耦接器160脱离时,第一行星齿轮组108的太阳齿轮120和第五行星齿轮组216的齿圈226可相对于第三行星齿轮组112的行星架142和第四行星齿轮组114的齿圈156旋转。
49.第三选择性耦接器162在啮合时将第一行星齿轮组108的齿圈126和第二行星齿轮组110的太阳齿轮130固定地耦接到固定部件106。当第三选择性耦接器162脱离时,第一行星齿轮组108的齿圈126和第二行星齿轮组110的太阳齿轮130可相对于固定部件106旋转。
50.第四选择性耦接器164在啮合时将第三行星齿轮组112的齿圈146、第二行星齿轮组110的行星架132和第一行星齿轮组108的行星架122固定地耦接到固定部件106。当第四选择性耦接器164脱离时,第三行星齿轮组112的齿圈146、第二行星齿轮组110的行星架132和第一行星齿轮组108的行星架122可相对于固定部件106旋转。
51.第五选择性耦接器166在啮合时将第四行星齿轮组114的齿圈156、第三行星齿轮组112的行星架142和第二选择性耦接器160固定地耦接到固定部件106。当第五选择性耦接器166脱离时,第四行星齿轮组114的齿圈156和第三行星齿轮组112的行星架142可相对于固定部件106旋转。
52.第六选择性耦接器168在啮合时将第二行星齿轮组110的齿圈136固定地耦接到固定部件106。当第六选择性耦接器168脱离时,第二行星齿轮组110的齿圈136可相对于固定部件106旋转。
53.第七选择性耦接器170在啮合时将同一行星齿轮组的至少两个构件固定地耦接在一起。更具体地说,第七选择性耦接器170在啮合时将第一行星齿轮组108的太阳齿轮120和第五行星齿轮组216的齿圈226固定地耦接到第五行星齿轮组216的太阳齿轮220和输入部件102。当第七选择性耦接器170啮合时,第五行星齿轮组216的齿圈226和太阳齿轮220锁定在一起。因此,太阳齿轮220、行星架222和齿圈226作为一个整体一起旋转。通过将太阳齿轮220、行星架222和齿圈226中的任意两个耦接在一起,可以实现相同的效果。当第七选择性耦接器170脱离时,第一行星齿轮组108的太阳齿轮120和太阳齿轮220的齿圈226可相对于第五行星齿轮组216的太阳齿轮220和输入部件102旋转。
54.第八选择性耦接器172在啮合时将第五行星齿轮组216的行星架222固定地耦接到
固定部件106。当第八选择性耦接器172脱离时,第五行星齿轮组216的行星架222可相对于固定部件106旋转。
55.通过啮合第一选择性耦接器158、第二选择性耦接器160、第三选择性耦接器162、第四选择性耦接器164、第五选择性耦接器166、第六选择性耦接器168、第七选择性耦接器170和第八选择性耦接器172的各种组合,多速变速器100的附加构件可以固定地耦接在一起。
56.多速变速器100的多个行星齿轮组和多个选择性耦接器可以以各种布置互连,以在至少九个前进传动比或速比和至少九个后退传动比或速比中从输入部件102向输出部件104提供扭矩。在所示的示例性实施例中,选择性耦接器158-168可选择性啮合,以建立至少九个前进传动比或速比以及至少九个后退传动比或速比。可切换选择性耦接器170、172的啮合以反转第五行星齿轮组216相对于输入部件102的旋转方向,以将至少九个前进传动比或速比中的每一个转换为互补的后退传动比或速比。
57.参考图2,示出了提供针对九个不同的前进传动比或速比和九个后退传动比或速比的第一选择性耦接器158、第二选择性耦接器160、第三选择性耦接器162、第四选择性耦接器164、第五选择性耦接器166、第六选择性耦接器168、第七选择性耦接器170和第八选择性耦接器172中的每一个的状态的示例性真值表200。每一行对应于用于变速器100的给定互连布置。第一列提供了档位范围(空档至第9倒挡的传动比)。其余列说明了选择性耦接器158-172中的哪些被啮合(“x”表示啮合),以及选择性耦接器158-172中的哪些被脱离(“空白”表示脱离)。图2只是可实现至少九个前进速比或传动比和至少九个后退速比或传动比的任意数量真值表的一个示例。
58.在图2的示例中,为了将多速变速器置于空档(n),第一选择性耦接器158、第二选择性耦接器160、第三选择性耦接器162、第四选择性耦接器164、第五选择性耦接器166、第六选择性耦接器168、第七选择性耦接器170和第八选择性耦接器172均处于脱离配置。第一选择性耦接器158、第二选择性耦接器160、第三选择性耦接器162、第四选择性耦接器164、第五选择性耦接器166、第六选择性耦接器168、第七选择性耦接器170和第八选择性耦接器172中的一个或多个在空档(n)中可以保持啮合,只要第一选择性耦接器158、第二选择性耦接器160、第三选择性耦接器162、第三选择性耦接器162、第五选择性耦接器166、第六选择性耦接器168、第七选择性耦接器170和第八选择性耦接器172的组合不将扭矩从输入部件102传输到输出部件104。
59.图2的示例性真值表200中的第一前进传动比或速比(显示为第1档)是通过使第五选择性耦接器166、第六选择性耦接器168和第七选择性耦接器170处于啮合配置以及使第一选择性耦接器158、第二选择性耦接器160、第三选择性耦接器162、第四选择性耦接器164和第八选择性耦接器172处于脱离配置来实现的。
60.图2的示例性真值表200中的第二或后续前进传动比或速比(显示为第2档)是通过使第一选择性耦接器158、第五选择性耦接器166和第七选择性耦接器170处于啮合配置,以及使第二选择性耦接器160、第三选择性耦接器162、第四选择性耦接器164、第六选择性耦接器168和第八选择性耦接器172处于脱离配置来实现的。因此,当在第一前进传动比或速比和第二前进传动比或速比之间转换时,第六选择性耦接器168被置于脱离配置中,第一选择性耦接器158被置于啮合配置中。
61.图2的示例性真值表200中的第三或后续前进传动比或速比(显示为第3档)是通过使第一选择性耦接器158、第六选择性耦接器168和第七选择性耦接器170处于啮合配置,以及使第二选择性耦接器160、第三选择性耦接器162、第四选择性耦接器164、第五选择性耦接器166和第八选择性耦接器172处于脱离配置来实现的。因此,当在第二前进传动比或速比和第三前进传动比或速比之间转换时,第五选择性耦接器166被置于脱离配置中,第六选择性耦接器168被置于啮合配置中。
62.图2的示例性真值表200中的第四或后续前进传动比或速比(显示为第4档)是通过使第一选择性耦接器158、第四选择性耦接器164和第七选择性耦接器170处于啮合配置,以及使第二选择性耦接器160、第三选择性耦接器162、第五选择性耦接器166、第六选择性耦接器168和第八选择性耦接器172处于脱离配置来实现的。因此,当在第三前进传动比或速比和第四前进传动比或速比之间转换时,第六选择性耦接器168被置于脱离配置中,第四选择性耦接器164被置于啮合配置中。
63.图2的示例性真值表200中的第五或后续前进传动比或速比(显示为第5档)是通过使第一选择性耦接器158、第三选择性耦接器162和第七选择性耦接器170处于啮合配置,以及使第二选择性耦接器160、第四选择性耦接器164、第五选择性耦接器166、第六选择性耦接器168和第八选择性耦接器172处于脱离配置来实现的。因此,当在第四前进传动比或速比和第五前进传动比或速比之间转换时,第四选择性耦接器164被置于脱离配置中,第三选择性耦接器162被置于啮合配置中。
64.图2的示例性真值表200中的第六或后续前进传动比或速比(显示为第6档)是通过使第一选择性耦接器158、第二选择性耦接器160和第七选择性耦接器170处于啮合配置,以及使第三选择性耦接器162、第四选择性耦接器164、第五选择性耦接器166、第六选择性耦接器168和第八选择性耦接器172处于脱离配置来实现的。因此,当在第五前进传动比或速比和第六前进传动比或速比之间转换时,第三选择性耦接器162被置于脱离配置中,第二选择性耦接器160被置于啮合配置中。
65.图2的示例性真值表200中的第七或后续前进传动比或速比(显示为第7档)是通过使第二选择性耦接器160、第三选择性耦接器162和第七选择性耦接器170处于啮合配置,以及使第一选择性耦接器158、第四选择性耦接器164、第五选择性耦接器166、第六选择性耦接器168和第八选择性耦接器172处于脱离配置来实现的。因此,当在第六前进传动比或速比和第七前进传动比或速比之间转换时,第一选择性耦接器158被置于脱离配置中,第三选择性耦接器162被置于啮合配置中。
66.图2的示例性真值表200中的第八或后续前进传动比或速比(显示为第8档)是通过使第二选择性耦接器160、第四选择性耦接器164和第七选择性耦接器170处于啮合配置,以及使第一选择性耦接器158、第三选择性耦接器162、第五选择性耦接器166、第六选择性耦接器168和第八选择性耦接器172处于脱离配置来实现的。因此,当在第七前进传动比或速比和第八前进传动比或速比之间转换时,第三选择性耦接器162被置于脱离配置中,第四选择性耦接器164被置于啮合配置中。
67.图2的示例性真值表200中的第九或后续前进传动比或速比(显示为第9档)是通过使第二选择性耦接器160、第六选择性耦接器168和第七选择性耦接器170处于啮合配置,以及使第一选择性耦接器158、第三选择性耦接器162、第四选择性耦接器164、第五选择性耦
接器166和第八选择性耦接器172处于脱离配置来实现的。因此,当在第八前进传动比或速比和第九前进传动比或速比之间转换时,第四选择性耦接器164被置于脱离配置中,第六选择性耦接器168被置于啮合配置中。
68.在第1至第9前进传动比或速比中的每一个中,选择性耦接器158-172的至少三个处于啮合配置。更具体地说,在第1至第9前进传动比或速比中的每一个中,第七选择性耦接器170处于啮合配置,而第八选择性耦接器172处于脱离配置。因此,输出部件104沿与输入部件102相同的方向旋转。为了针对第1至第9前进传动比或速比中的每一个反转输出部件104相对于输入部件102的方向,第七选择性耦接器170被置于脱离配置中,以及第八选择性耦接器172被置于啮合配置中。将第七选择性耦接器170置于脱离配置中,将第八选择性耦接器172置于啮合配置中,并针对第1至第9前进传动比或速比中的每一个保持选择性耦接器158-168的选择性啮合和脱离配置,反转了输出部件104相对于输入部件102的方向并建立了互补的后退传动比或速比。由于第五行星齿轮组216位于输入部件102和第一行星齿轮组108、第二行星齿轮组110、第三行星齿轮组112和第四行星齿轮组114之间,因此第五行星齿轮组216可称为输入反转行星齿轮组。
69.图2的示例性真值表200中的与第一前进传动比或速比互补的第一后退传动比或速比(显示为第1倒挡)是通过使第五选择性耦接器166、第六选择性耦接器168和第八选择性耦接器172处于啮合配置,以及使第一选择性耦接器158、第二选择性耦接器160、第三选择性耦接器162、第四选择性耦接器164和第七选择性耦接器170处于脱离配置来实现的。因此,当在第一前进传动比或速比和第一后退传动比或速比之间转换时,第七选择性耦接器170被置于脱离配置中,第八选择性耦接器172被置于啮合配置中。
70.图2的示例性真值表200中的与第二前进传动比或速比互补的第二或后续后退传动比或速比(显示为第2倒挡)是通过使第一选择性耦接器158、第五选择性耦接器166和第八选择性耦接器172处于啮合配置,以及使第二选择性耦接器160、第三选择性耦接器162、第四选择性耦接器164、第六选择性耦接器168和第七选择性耦接器170处于脱离配置来实现的。因此,当在第一后退传动比或速比和第二后退传动比或速比之间转换时,第六选择性耦接器168被置于脱离配置中,第一选择性耦接器158被置于啮合配置中。当在第二前进传动比或速比和第二后退传动比或速比之间转换时,第七选择性耦接器170被置于脱离配置中,第八选择性耦接器172被置于啮合配置中。
71.图2的示例性真值表200中的与第三前进传动比或速比互补的第三或后续后退传动比或速比(显示为第3倒挡)是通过使第一选择性耦接器158、第六选择性耦接器168和第八选择性耦接器172处于啮合配置,以及使第二选择性耦接器160、第三选择性耦接器162、第四选择性耦接器164、第五选择性耦接器166和第七选择性耦接器170处于脱离配置来实现的。因此,当在第二后退传动比或速比和第三后退传动比或速比之间转换时,第五选择性耦接器166被置于脱离配置中,第六选择性耦接器168被置于啮合配置中。当在第三前进传动比或速比和第三后退传动比或速比之间转换时,第七选择性耦接器170被置于脱离配置中,第八选择性耦接器172被置于啮合配置中。
72.图2的示例性真值表200中的与第四前进传动比或速比互补的第四或后续后退传动比或速比(显示为第4倒挡)是通过使第一选择性耦接器158、第四选择性耦接器164和第八选择性耦接器172处于啮合配置,以及使第二选择性耦接器160、第三选择性耦接器162、
第五选择性耦接器166、第六选择性耦接器168和第七选择性耦接器170处于脱离配置来实现的。因此,当在第三后退传动比或速比和第四后退传动比或速比之间转换时,第六选择性耦接器168被置于脱离配置中,第四选择性耦接器164被置于啮合配置中。当在第四前进传动比或速比和第四后退传动比或速比之间转换时,第七选择性耦接器170被置于脱离配置中,第八选择性耦接器172被置于啮合配置中。
73.图2的示例性真值表200中的与第五前进传动比或速比互补的第五或后续后退传动比或速比(显示为第5倒挡)是通过使第一选择性耦接器158、第三选择性耦接器162和第八选择性耦接器172处于啮合配置以及使第二选择性耦接器160、第四选择性耦接器164、第五选择性耦接器166、第六选择性耦接器168和第七选择性耦接器170处于脱离配置来实现的。因此,当在第四后退传动比或速比和第五后退传动比或速比之间转换时,第四选择性耦接器164被置于脱离配置中,第三选择性耦接器162被置于啮合配置中。当在第五前进传动比或速比和第五后退传动比或速比之间转换时,第七选择性耦接器170被置于脱离配置中,第八选择性耦接器172被置于啮合配置中。
74.图2的示例性真值表200中的与第六前进传动比或速比互补的第六或后续后退传动比或速比(显示为第6倒挡)是通过使第一选择性耦接器158、第二选择性耦接器160和第八选择性耦接器172处于啮合配置以及使第三选择性耦接器162、第四选择性耦接器164、第五选择性耦接器166、第六选择性耦接器168和第七选择性耦接器170处于脱离配置来实现的。因此,当在第五后退传动比或速比和第六后退传动比或速比之间转换时,第三选择性耦接器162被置于脱离配置中,第二选择性耦接器160被置于啮合配置中。当在第六前进传动比或速比和第六后退传动比或速比之间转换时,第七选择性耦接器170被置于脱离配置中,第八选择性耦接器172被置于啮合配置中。
75.图2的示例性真值表200中的与第七前进传动比或速比互补的第七或后续后退传动比或速比(显示为第7倒挡)是通过使第二选择性耦接器160、第三选择性耦接器162和第八选择性耦接器172处于啮合配置以及使第一选择性耦接器158、第四选择性耦接器164、第五选择性耦接器166、第六选择性耦接器168和第七选择性耦接器170处于脱离配置来实现的。因此,当在第六后退传动比或速比和第七后退传动比或速比之间转换时,第一选择性耦接器158被置于脱离配置中,第三选择性耦接器162被置于啮合配置中。当在第七前进传动比或速比和第七后退传动比或速比之间转换时,第七选择性耦接器170被置于脱离配置中,第八选择性耦接器172被置于啮合配置中。
76.图2的示例性真值表200中的与第八前进传动比或速比互补的第八或后续后退传动比或速比(显示为第8倒挡是通过使第二选择性耦接器160、第四选择性耦接器164和第八选择性耦接器172处于啮合配置以及使第一选择性耦接器158、第三选择性耦接器162、第五选择性耦接器166、第六选择性耦接器168和第七选择性耦接器170处于脱离配置来实现的。因此,当在第七后退传动比或速比和第八后退传动比或速比之间转换时,第三选择性耦接器162被置于脱离配置中,第四选择性耦接器164被置于啮合配置中。当在第八前进传动比或速比和第八后退传动比或速比之间转换时,第七选择性耦接器170被置于脱离配置中,第八选择性耦接器172被置于啮合配置中。
77.图2的示例性真值表200中的与第九前进传动比或速比互补的第九或后续后退传动比或速比(显示为第9倒挡)是通过使第二选择性耦接器160、第六选择性耦接器168和第
八选择性耦接器172处于啮合配置以及使第一选择性耦接器158、第三选择性耦接器162、第四选择性耦接器164、第五选择性耦接器166和第七选择性耦接器170处于脱离配置来实现的。因此,当在第八后退传动比或速比和第九后退传动比或速比之间转换时,第四选择性耦接器164被置于脱离配置中,第六选择性耦接器168被置于啮合配置中。当在第九前进传动比或速比和第九后退传动比或速比之间转换时,第七选择性耦接器170被置于脱离配置中,第八选择性耦接器172被置于啮合配置中。
78.本公开预期降档遵循相应升档的相反顺序(如上所述)。此外,多个单转换的开机跳档是可能的(例如,从第1升到第3,从第3降到第1,从第3升到第5,以及从第5降到第3)。
79.在图示的实施例中,针对图示的前进和后退传动比或速比中的每一个,可用的选择性耦接器的三个的各种组合被啮合。基于啮合的选择性耦接器的其他组合,附加的前进传动比或速比和后退传动比或速比是可能的。尽管在图示的实施例中,每个前进传动比或速比和后退传动比或速比使得可用的选择性耦接器的三个啮合,但是可以预期可以同时啮合少于三个和多于三个选择性耦接器。
80.尽管本发明已经被描述为具有示例性设计,但是本发明可以在本公开的精神和范围内进一步被修改。因此,本技术旨在涵盖使用其一般原理的本发明的任何变化、使用或更改。此外,本技术旨在涵盖属于本发明所属领域的已知或惯常实践并且落入所附权利要求的限制内的与本公开的偏离。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1