制动设备、工业机器人和方法与流程
本公开总体上涉及制动设备。特别地,提供了制动设备、包括制动设备的工业机器人和制备制动设备的方法。
背景技术:
1、工业机器人可以包括多个制动设备,例如在每个接头中包括一个制动设备。在诸如盘式制动器和带式制动器之类的一些制动设备中,摩擦力与夹紧力成正比。这意味着需要释放力来克服夹紧力以释放制动设备。这种释放力通常由螺线管或其它电动致动器来生成,螺线管或其它电动致动器必须为给定的制动力矩提供较大的力。因此,制动设备具有高能耗,在待机模式中生成大量的热量并且往往体积大。
2、为了提供更有效的制动,可以使用销式制动器。销式制动器可以包括具有致动器销的致动器,该致动器销可选择性地移动进入和脱离与被压靠在制动表面上的制动盘的接合。当制动盘被致动器销接合时,制动盘的旋转被阻止并且在制动盘和制动表面之间产生摩擦制动。以这种方式,产生摩擦力以生成制动力矩的法向力与致动器解耦。
3、wo2017148499a1公开了一种用于工业机器人的多盘式制动器,该多盘式制动器包括轮毂。多盘式制动器包括:至少一个摩擦盘,其被布置在轮毂上以使其随着轮毂的运动而旋转;以及制动盘,其可自由旋转地被布置在轮毂上。制动盘具有在制动盘的径向方向上突出的至少一个制动突起,以及包括致动器和止动构件的致动布置。致动布置被布置成移动止动构件,使得止动构件和至少一个制动突起接合,由此中止制动盘的任何旋转运动并且通过作用在至少一个摩擦盘和制动盘之间的摩擦来产生制动力。
技术实现思路
1、虽然与需要释放力来克服夹紧力以释放制动设备的制动设备相比,销式制动器可以被制造得更紧凑,但是销式制动器对油、油脂和其它减少摩擦的物质的进入很敏感。例如,油脂会从工业机器人中与制动设备相邻的齿轮箱蒸发,并且最终落在制动设备的摩擦材料上。在这种情况下,由制动设备生成的制动力矩可能急剧减小并且制动设备可能无法按计划发挥作用。还有许多其它情形可能会帮助将减摩物质引入到制动设备的摩擦材料中。这是一个严重的安全问题。可以做出设计努力以减少减摩物质进入到制动设备的摩擦材料中。然而,这样将导致更复杂、体积更大和/或更昂贵的设计。
2、与销式制动器相关联的另一个安全问题是在致动器销和制动盘之间可能会生成很大的冲击力。这个冲击力可能导致制动设备的组件损坏。
3、本公开的一个目的是提供一种具有安全操作的制动设备。
4、本公开的另一目的是提供一种具有可靠操作的制动设备。
5、本公开的又一目的是提供一种对油和油脂较不敏感的制动设备。
6、本公开的又一目的是提供一种具有减少的维护要求的制动设备。
7、本公开的又一目的是提供一种具有紧凑设计的制动设备。
8、本公开的又一目的是提供一种具有成本效益设计的制动设备。
9、本公开的又一目的是提供一种具有简单设计的制动设备。
10、本公开的又一目的是提供一种适于在高速、高力矩应用中使用的制动设备。
11、本公开的又一目的是提供一种组合地解决前述几个或全部目的制动设备。
12、本公开的又一目的是提供一种包括制动设备的工业机器人,该工业机器人解决了前述目的中的一个、几个或全部。
13、本公开的又一目的是提供一种制备制动设备的方法,该方法解决了前述目的中的一个、几个或全部。
14、根据第一方面,提供了一种制动设备,包括:第一设备;具有第一摩擦制动表面和可接合结构的制动元件;相对于第一设备可移动的第二设备;第二摩擦制动表面;施力设备,其被布置成以压力将第一摩擦制动表面和第二摩擦制动表面彼此压靠;连接到第一设备的致动器,该致动器包括能够在脱离位置和接合位置之间移动的接合结构,在脱离位置中接合结构不接合可接合结构,在接合位置中接合结构接合可接合结构以制动第一设备与第二设备之间的相对运动;其中第一摩擦制动表面和第二摩擦制动表面之间的动态摩擦系数小于0.3,诸如小于0.15,或小于0.1;并且其中压力的大小相对于动态摩擦系数而被设计。
15、当接合结构采用脱离位置时,致动元件随第二设备一起移动。为了制动第二设备,接合结构被移动到接合位置。制动元件由此变得锁定,使得在第一摩擦制动表面与第二摩擦制动表面之间发生滑动。第一摩擦制动表面与第二摩擦制动表面之间的摩擦对第二设备的移动速度进行制动。当接合结构采用接合位置时,制动元件与第一设备之间的相对移动被阻止。制动设备可以被用于第二设备的静态和动态制动。
16、此外,由于施力设备被布置为将第一摩擦制动表面和第二摩擦制动表面彼此压靠,并且接合结构被致动器移动到接合位置,在接合位置中接合结构接合可接合结构以实现制动,所以产生摩擦力(例如生成制动力矩)的法向力与致动器解耦。因此,制动设备提供了有效的制动。
17、压力导致第一摩擦制动表面与第二摩擦制动表面之间的接触界面被夹紧。施力设备因此压缩制动元件,使得迫使第二摩擦制动表面压靠在第一摩擦制动表面上。施力设备可以被预张紧以提供压力。
18、制动设备还可以包括制动构件,诸如摩擦盘。制动构件可以包括第二摩擦制动表面。第二设备可以包括制动构件。也就是说,第二设备可以包括第二摩擦制动表面。
19、第二设备可以包括施力设备。备选地,施力设备可以在第二设备的外部。
20、第一设备可以采用各种替代配置。第一设备可以包括用于致动器的支撑件。第一设备可以被固定到工业机器人的接头的第一连杆或由其构成,并且第二设备可以被固定到接头的第二连杆。在每种情况下,致动器连接到第一设备,使得接合结构相对于第一设备在脱离位置和接合位置之间移动。
21、在传统的摩擦制动设备中,选择摩擦材料以在材料之间提供高摩擦力。直接相反,根据第一方面的制动设备有意地在第一摩擦制动表面与第二摩擦制动表面之间提供有低动态摩擦系数,例如直接来自制动设备的生产。借助于减小的动态摩擦系数结合对应增大的压力,当第一摩擦制动表面和/或第二摩擦制动表面被油、油脂或来自制动设备周围(例如来自附近的齿轮箱)的其它润滑剂污染时,制动设备使得能够减少或消除制动力或制动力矩的变化。
22、可以通过用油、油脂、石墨粉或类似的摩擦降低物质润滑或浸渍第一摩擦制动表面和/或第二摩擦制动表面来获得低动态摩擦系数。在这种情况下,可以将一种或多种减摩物质烧结到第一摩擦制动表面和/或第二摩擦制动表面中。
23、备选地或附加地,通过对第一摩擦制动表面和第二摩擦制动表面的材料选择,可以获得低动态摩擦系数。第一摩擦制动表面和/或第二摩擦制动表面可以例如由钢、青铜、尼龙或塑料制成。
24、第一摩擦制动表面与第二摩擦制动表面之间的静态摩擦系数可小于0.3,诸如小于0.2。根据一个特定示例,第一摩擦制动表面和第二摩擦制动表面中的每一个均由涂油钢制成,以提供0.15的静态摩擦系数和0.081的动态摩擦系数。
25、对于需要释放力来克服夹紧力以释放制动设备的制动设备来说,在第一摩擦制动表面和第二摩擦制动表面之间有意提供低动态摩擦系数的概念需要非常大的致动器,或者甚至是不可能的。低动态摩擦系数需要非常高的夹紧力才能提供所期望的制动力矩。
26、然而,由于根据本公开的制动设备包括与压力分离的致动器,所以压力可以被设置得非常高而不需要对应增加致动器的额定值。可以使用非常硬的弹簧将第一摩擦制动表面和第二摩擦制动表面压靠在一起,例如当被润滑时,同时可以使用非常小的致动器来在脱离位置和接合位置之间移动接合结构。制动设备因此利用相对高的压力来生成高的法向力以补偿低动态摩擦系数。以这种方式,使制动设备对具有润滑效果的外部油或制动设备的各种其它污染物不那么敏感。
27、制动元件、施力设备、第一摩擦制动表面和第二摩擦制动表面可以被布置成堆叠。在这种情况下,制动元件可以被夹紧在堆叠中。
28、致动器可以是断电致动器。也就是说,致动器可能需要电力来将接合结构移动到脱离位置。当电力停止时,例如借助于致动器弹簧,接合结构自动返回到接合位置。致动器可以是螺线管。制动设备可以包括多个致动器,每个致动器被配置为在脱离位置和接合位置之间移动相关联的接合结构。
29、第一方面的制动设备可以包括第二方面的制动设备的任何特征。
30、制动设备还可以包括润滑剂。在这种情况下,在润滑剂出现在第一摩擦制动表面和第二摩擦制动表面之间的情况下,第一摩擦制动表面、第二摩擦制动表面和润滑剂可以被配置成使得动态摩擦系数变化小于10%,诸如小于5%,诸如小于2%。第一摩擦制动表面和第二摩擦制动表面之间的润滑剂和动态摩擦系数可以被设计成使得动态摩擦系数不会在第一摩擦制动表面和第二摩擦制动表面之间仅存在少量润滑剂的状态与第一摩擦制动表面和第二摩擦制动表面之间存在大量润滑剂的状态之间显著变化。
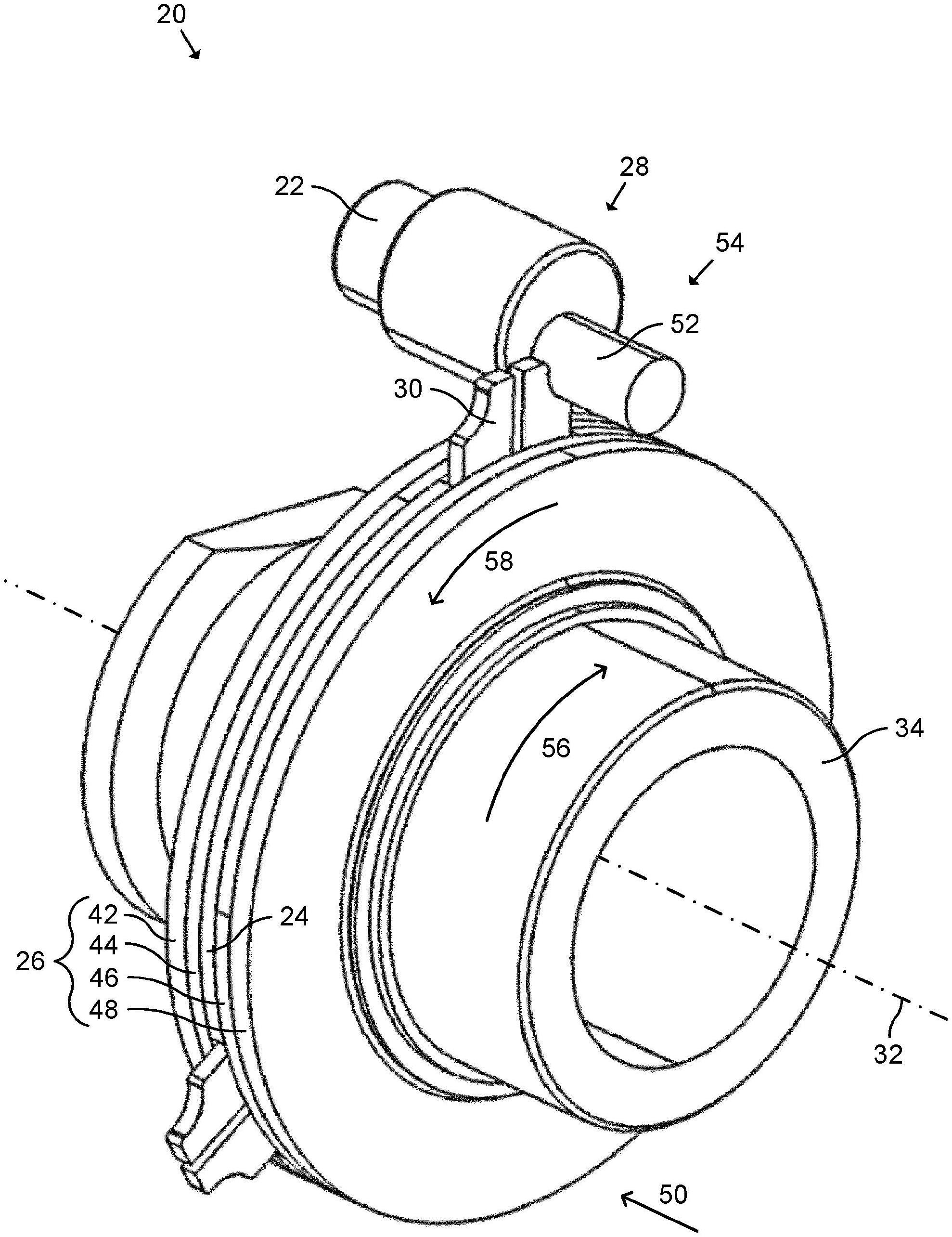
31、第二设备可相对于第一设备绕旋转轴线旋转。在这种情况下,制动设备可以被配置为施加目标动态制动力矩以抵抗第一摩擦制动表面和第二摩擦制动表面之间的相对旋转。在这种情况下,压力(50)的大小还可以相对于动态摩擦系数而被设计。对于工业机器人,目标动态制动力矩可以被设置为0.2nm至10nm。
32、施力设备可以在平行于旋转轴线的方向上对制动元件进行施力。备选地或附加地,接合结构可以在平行于旋转轴线的方向上在脱离位置和接合位置之间移动。
33、根据本公开的接合结构可以是销。销可以基本上平行于或平行于旋转轴线。根据本公开的第二设备备选地可以相对于第一设备线性地移动。
34、根据第二方面,提供一种制动设备,包括:第一设备;具有第一摩擦制动表面和可接合结构的制动元件;相对于第一设备可移动的第二设备;第二摩擦制动表面;施力设备,其布置成将第一摩擦制动表面和第二摩擦制动表面彼此压靠;以及连接到第一设备的致动器,该致动器包括能够在脱离位置和接合位置之间移动的接合结构,在脱离位置中接合结构不接合可接合结构,在接合位置中接合结构接合可接合结构以制动第一设备与第二设备之间的相对运动;其中接合结构和/或可接合结构被配置成使得接合结构在接合结构采用接合位置时回弹性地接合可接合结构。
35、对于现有技术制动设备中的接合结构和可接合结构之间相对低的速度,这些零件之间的冲击力可能不是问题。然而,对于相对较高的速度,存在接合结构或可接合结构被冲击力损坏的风险。
36、相比之下,根据第二方面的制动设备,接合结构和可接合结构之间的回弹性减小了接合结构和可接合结构之间的冲击力的大小。结果,降低了制动设备发生故障的风险。制动设备由此构成例如销式制动器类型的摩擦制动设备,其适用于高速和高力矩应用。
37、制动设备具有成本效益和紧凑的设计,同时制动设备可以被用于具有高速马达和高制动力矩需求的高要求机器人应用中。接合结构与可接合结构之间的回弹性接合可以是弹性接合。
38、第二方面的制动设备可以包括第一方面的制动设备的任何特征。
39、可接合结构可以包括有助于回弹性接合的一个或多个孔。通过在可接合结构中提供孔,可接合结构被赋予柔性并且允许弹性地弯曲。由此可以减小接合结构和可接合结构之间的冲击力和接触载荷。具体地,当接合结构接合可接合结构时,可以大大减小冲击力的峰值。
40、借助于一个或多个孔,制动设备可以以非常成本有效和紧凑的设计来减小接合结构和可接合结构之间的冲击力。可以通过调整一个或多个孔的几何形状来准确地校准可接合结构的柔性。每个孔可以是制动元件的切口。因此,可以通过从制动元件切掉材料来提供一个或多个孔。还可以考虑制动元件的厚度以提供可接合结构的期望柔性。
41、制动元件可以由单件材料形成,例如金属或合金。备选地或附加地,制动元件可以具有均匀的厚度。而非提供一个或多个孔或者除了提供一个或多个孔外,可以将回弹性引入到接合结构和/或致动器的支撑件。
42、第二设备可以相对于第一设备绕旋转轴线旋转。
43、每个孔可以是相对于旋转轴线基本上在径向方向上或在径向方向上延伸的槽。
44、制动设备可以被配置成使得制动元件在接合结构和可接合结构之间的回弹性接合期间可以绕旋转轴线旋转至少0.5度。制动设备可以被配置成使得制动元件在接合结构和可接合结构之间的回弹性接合期间可以绕旋转轴线旋转至少1度,诸如1.5度。例如,从接合结构接触可接合结构的制动元件的角度位置开始,制动元件可以绕可接合结构的旋转轴线旋转至少0.5度,诸如至少1度,诸如1.5度,仅具有弹性变形并且没有塑性变形。
45、根据本公开的制动元件可以是扁平的,例如,由盘构成。制动元件可以由金属制成,诸如钢。备选地或附加地,制动元件可以与旋转轴线是同心的和/或是环形的。制动元件可以是星形的。
46、制动设备可以包括主摩擦盘和副摩擦盘。在这种情况下,制动元件可以被夹在主摩擦盘和副摩擦盘之间。主摩擦盘和副摩擦盘也可以布置被成堆叠。主摩擦盘和副摩擦盘可以相对于旋转轴线是同心的和/或是环形的。主摩擦盘和副摩擦盘可以相对于第二设备是可旋转的,或者可以形成第二设备的一部分。在前一种情况下,在制动设备中引入附加的摩擦界面,例如在第二设备的主锁紧盘和主摩擦盘之间,以及在第二设备的副锁紧盘和副摩擦盘之间。
47、制动元件可以包括接触主摩擦盘的主第二摩擦制动表面的主第一摩擦制动表面,以及接触副摩擦盘的副第二摩擦制动表面的相对的副第一摩擦制动表面。每个摩擦盘可以是环形的。每个摩擦盘可以与旋转轴线是同心的和/或可以位于垂直于旋转轴线的相应平面中。
48、根据本公开的可接合结构可以包括一个或多个齿。齿可以相对于旋转轴线在径向方向上(例如,径向向外)延伸。在制动元件是扁平的情况下,每个齿可以被布置成在与接合结构碰撞时在制动元件的平面内弯曲。一个或多个齿可以由孔来限定。
49、制动元件可以包括多个可接合结构,例如三个可接合结构。提供的可接合结构越多,当接合结构采用接合位置时,接合结构与可接合结构之间的间隙将越小。
50、每个可接合结构包括两个平行齿。在这种情况下,可接合结构可以包括三个槽,使得齿被布置在第一槽和第二槽之间,并且第三槽被布置在两个齿之间。在这种情况下,第一齿可以被接合结构从第一侧撞击并且第二齿可以被接合结构从与第一侧相对的第二侧撞击。
51、根据本公开的施力设备可以包括弹簧。弹簧提供第一摩擦制动表面和第二摩擦制动表面彼此抵靠的预张力。弹簧可以发生变形以提供压力。
52、根据第三方面,提供了一种包括根据本公开的制动设备的工业机器人。
53、根据第四方面,提供了一种制备制动设备的方法,该方法包括提供制动设备,该制动设备包括:具有第一摩擦制动表面和可接合结构的制动元件;可相对于第一设备移动的第二设备;第二摩擦制动表面;施力设备,其被布置成以压力将第一摩擦制动表面和第二摩擦制动表面彼此压紧;连接到第一设备的致动器,该致动器包括能够在脱离位置和接合位置之间移动的接合结构,在脱离位置中接合结构不接合可接合结构,在接合位置中接合结构接合可接合结构以制动第一设备与第二设备之间的相对运动;其中第一摩擦制动表面和第二摩擦制动表面之间的动态摩擦系数小于0.3,诸如小于0.15,或小于0.1;并且其中该方法还包括基于动态摩擦系数来确定压力的大小。
54、第二设备可相对于第一设备绕旋转轴线旋转。在这种情况下,该方法还可以包括确定制动设备的目标动态制动力矩;并且基于目标动态制动力矩来确定压力的大小。
55、该方法还可以包括将所提供的制动设备的第一设备连接到基座结构;并且将所提供的制动设备的第二设备连接到从动构件。基座结构和从动构件可以是工业机器人的公共接头的第一连杆和第二连杆。
- 还没有人留言评论。精彩留言会获得点赞!