一种车辆用智能差速装置的制作方法
1.本发明涉及差速器技术领域,具体涉及一种车辆用智能差速装置。
背景技术:
2.差速器能够使左、右(或前、后)驱动轮实现以不同转速转动的机构。主要由左右半轴齿轮、两个行星齿轮及齿轮架组成。功用是当汽车转弯行驶或在不平路面上行驶时,使左右车轮以不同转速滚动,即保证两侧驱动车轮作纯滚动运动。差速器是为了调整左右轮的转速差而装置的。在四轮驱动时,为了驱动四个车轮,必须将所有的车轮连接起来,如果将四个车轮机械连接在一起,汽车在曲线行驶的时候就不能以相同的速度旋转,为了能让汽车曲线行驶旋转速度基本一致性,这时需要加入中间差速器用以调整前后轮的转速差。
3.然而,目前的差速器采用半轴结构,虽然能够起到很好的转速差调整效果,但是其结构和制造工艺均比较复杂,制造成本也高。因此,需要研究一种新的差速器结构。
技术实现要素:
4.有鉴于此,本发明提供一种车辆用智能差速装置,具有结构和制造工艺简单的优点,而且制造成本低,转向控制方便,有利于推广使用。
5.为解决上述技术问题,本发明提供一种车辆用智能差速装置,包括差速系统和转向控制系统,所述转向控制系统用于监控车辆的转向并控制所述差速系统;所述差速系统包括左圆锥齿轮、右圆锥齿轮、差速圆锥齿轮、动力输入轴和差速输入轴,所述左圆锥齿轮和所述右圆锥齿轮分别转动设置在所述动力输入轴的左侧和右侧,所述差速圆锥齿轮同时与所述左圆锥齿轮和所述右圆锥齿轮相啮合,所述差速输入轴设置在所述差速圆锥齿轮上,所述动力输入轴的左端与所述左圆锥齿轮的外端之间通过左齿轮啮合机构实现传动连接,所述动力输入轴的右端与所述右圆锥齿轮的外端之间通过右齿轮啮合机构实现传动连接,所述左齿轮啮合机构的外端和所述右齿轮啮合机构的外端分别设置有左轮输出模块和右轮输出模块; 所述转向控制系统为所述差速输入轴提供差速动力输入。
6.进一步地,所述左齿轮啮合机构包括左太阳轮、三个或四个左行星轮和左内齿圈,所述左太阳轮固定设置在位于所述左圆锥齿轮外侧的所述动力输入轴上,全部的左行星轮转动且呈周向均匀转动设置在所述左圆锥齿轮的外端面上,所述左内齿圈与全部的左行星轮同时相内啮合,所述左轮输出模块固定设置在所述左内齿圈的外端面上,所述左太阳轮与所述左行星轮相啮合。
7.进一步地,所述动力输入轴的左端部伸出所述左太阳轮,且所述左内齿圈的中心转动设置在所述动力输入轴的左端部上。
8.进一步地,所述右齿轮啮合机构包括右太阳轮、三个或四个右行星轮和右内齿圈,所述右太阳轮固定设置在位于所述右圆锥齿轮外侧的所述动力输入轴上,全部的右行星轮转动且呈周向均匀转动设置在所述右圆锥齿轮的外端面上,所述右内齿圈与全部的右行星
轮同时相内啮合,所述右轮输出模块固定设置在所述右内齿圈的外端面上,所述右太阳轮与所述右行星轮相啮合。
9.进一步地,所述动力输入轴的右端部伸出所述右太阳轮,且所述右内齿圈的中心转动设置在所述动力输入轴的右端部上。
10.进一步地,位于所述左圆锥齿轮和所述右圆锥齿轮之间的所述动力输入轴上固定设置有动力连接轮,所述动力连接轮采用圆锥齿轮,所述动力连接轮由动力输入轮实现动力输入。
11.进一步地,所述转向控制系统包括涡轮、蜗杆、驱动电机、电机控制器、左调速控制器、右调速控制器、双面转向齿条、转向齿轮和速度传感器,所述涡轮固定设置在所述差速输入轴上,所述蜗杆与所述驱动电机的输出轴相连接并用于驱动所述涡轮旋转,所述速度传感器用于对车辆的传动轴进行测速,所述转向齿轮固定设置在车辆的转向轴的下端,所述转向齿轮与所述双面转向齿条的一侧相啮合,所述左调速控制器和所述右调速控制器分别能够与所述双面转向齿条的另一侧的两端相啮合,且所述双面转向齿条的另一侧的齿条长度小于所述左调速控制器与所述双面转向齿条的啮合点至所述右调速控制器与所述双面转向齿条的啮合点之间的距离,所述左调速控制器、所述右调速控制器、所述驱动电机和所述速度传感器均与所述电机控制器信号互连。
12.进一步地,所述左调速控制器包括左固定轴、左调速控制齿轮和左转速传感器,所述左调速控制齿轮转动设置在所述左固定轴上,所述左转速传感器用于测量所述左调速控制齿轮的方向和位置,所述左转速传感器与所述电机控制器信号互连。
13.进一步地,所述右调速控制器包括右固定轴、右调速控制齿轮和右转速传感器,所述右调速控制齿轮转动设置在所述右固定轴上,所述右转速传感器用于测量所述右调速控制齿轮的方向和位置,所述右转速传感器与所述电机控制器信号互连。
14.进一步地,所述左轮输出模块采用轮轴或者轮毂。
15.进一步地,所述右轮输出模块采用轮轴或者轮毂。
16.本发明的上述技术方案的有益效果如下:本发明摒弃了传统采用半轴结构的差速器,采用差速系统和转向控制系统的结构,转向控制系统用于监控车辆的转向并控制差速系统,其中,差速系统采用以下结构,具体包括左圆锥齿轮、右圆锥齿轮、差速圆锥齿轮、动力输入轴和差速输入轴的结构,其中,左圆锥齿轮和右圆锥齿轮分别转动设置在动力输入轴的左侧和右侧,而差速圆锥齿轮同时与左圆锥齿轮和右圆锥齿轮相啮合,差速输入轴设置在差速圆锥齿轮上,动力输入轴的左端与左圆锥齿轮的外端之间通过左齿轮啮合机构实现传动连接,动力输入轴的右端与右圆锥齿轮的外端之间通过右齿轮啮合机构实现传动连接,左齿轮啮合机构的外端和右齿轮啮合机构的外端分别设置有左轮输出模块和右轮输出模块。采用上述结构的车辆用智能差速装置,具有结构和制造工艺简单的优点,而且制造成本低,转向控制方便,有利于推广使用。
附图说明
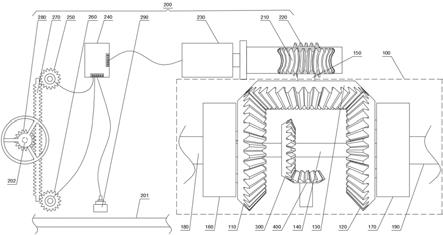
17.图1为本发明一种车辆用智能差速装置的结构示意图;图2为本发明中差速系统的结构主视示意图;图3为本发明中差速系统的结构剖面示意图;
图4为本发明中差速系统的结构左视示意图;图5为本发明中差速系统的结构右视示意图;图6为本发明中差速系统的结构立体示意图;图7为本发明中左太阳轮与左行星轮的装配结构示意图;图8为本发明中双面转向齿条的装配结构示意图;图中:差速系统100;左圆锥齿轮110;右圆锥齿轮120;差速圆锥齿轮130;动力输入轴140;左端部141;右端部142;差速输入轴150;左齿轮啮合机构160;左太阳轮161;左行星轮162;左内齿圈163;右齿轮啮合机构170;右太阳轮171;右行星轮172;右内齿圈173;左轮输出模块180;右轮输出模块190;转向控制系统200;传动轴201;转向轴202;涡轮210;蜗杆220;驱动电机230;电机控制器240;左调速控制器250;左固定轴251;左调速控制齿轮252;左转速传感器253;右调速控制器260;右固定轴261;右调速控制齿轮262;右转速传感器263;双面转向齿条270;转向齿轮280;速度传感器290;动力连接轮300;动力输入轮400。
具体实施方式
18.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例的附图1
‑
8,对本发明实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本发明保护的范围。
19.如图1
‑
8所示:一种车辆用智能差速装置,包括差速系统和转向控制系统,所述转向控制系统用于监控车辆的转向并控制所述差速系统;所述差速系统包括左圆锥齿轮、右圆锥齿轮、差速圆锥齿轮、动力输入轴和差速输入轴,所述左圆锥齿轮和所述右圆锥齿轮分别转动设置在所述动力输入轴的左侧和右侧,所述差速圆锥齿轮同时与所述左圆锥齿轮和所述右圆锥齿轮相啮合,所述差速输入轴设置在所述差速圆锥齿轮上,所述动力输入轴的左端与所述左圆锥齿轮的外端之间通过左齿轮啮合机构实现传动连接,所述动力输入轴的右端与所述右圆锥齿轮的外端之间通过右齿轮啮合机构实现传动连接,所述左齿轮啮合机构的外端和所述右齿轮啮合机构的外端分别设置有左轮输出模块和右轮输出模块; 所述转向控制系统为所述差速输入轴提供差速动力输入。
20.具体而言,如图1和图8所示,一种车辆用智能差速装置,包括差速系统100和转向控制系统200,所述转向控制系统200用于监控车辆的转向并控制所述差速系统100;所述差速系统100包括左圆锥齿轮110、右圆锥齿轮120、差速圆锥齿轮130、动力输入轴140和差速输入轴150,所述左圆锥齿轮110和所述右圆锥齿轮120分别转动设置在所述动力输入轴140的左侧和右侧,所述差速圆锥齿轮130同时与所述左圆锥齿轮110和所述右圆锥齿轮120相啮合,所述差速输入轴150设置在所述差速圆锥齿轮130上,所述动力输入轴140的左端与所述左圆锥齿轮110的外端之间通过左齿轮啮合机构160实现传动连接,所述动力输入轴140的右端与所述右圆锥齿轮120的外端之间通过右齿轮啮合机构170实现传动连接,所述左齿轮啮合机构160的外端和所述右齿轮啮合机构170的外端分别设置有左轮输出模块180和右轮输出模块190; 所述转向控制系统200为所述差速输入轴150提供差速动
力输入。
21.根据本发明的另一个实施例,如图4和图3所示,所述左齿轮啮合机构160包括左太阳轮161、三个左行星轮162和左内齿圈163,所述左太阳轮161固定设置在位于所述左圆锥齿轮110外侧的所述动力输入轴140上,全部的左行星轮162转动且呈周向均匀转动设置在所述左圆锥齿轮110的外端面上,所述左内齿圈163与全部的左行星轮162同时相内啮合,所述左轮输出模块180固定设置在所述左内齿圈163的外端面上,所述左太阳轮161与所述左行星轮162相啮合。
22.该实施例中,左行星轮162的数量为三个,很显然,左行星轮162的数量也可以采用其他数量,比如采用四个,同样能够起到相同的传动的效果。
23.根据本发明的另一个实施例,如图3所示,所述动力输入轴140的左端部141伸出所述左太阳轮161,且所述左内齿圈163的中心转动设置在所述动力输入轴140的左端部141上。
24.根据本发明的另一个实施例,如图5和图3所示,所述右齿轮啮合机构170包括右太阳轮171、三个右行星轮172和右内齿圈173,所述右太阳轮171固定设置在位于所述右圆锥齿轮120外侧的所述动力输入轴140上,全部的右行星轮172转动且呈周向均匀转动设置在所述右圆锥齿轮120的外端面上,所述右内齿圈173与全部的右行星轮172同时相内啮合,所述右轮输出模块190固定设置在所述右内齿圈173的外端面上,所述右太阳轮171与所述右行星轮172相啮合。
25.该实施例中,右行星轮172的数量为三个,很显然,右行星轮172的数量也可以采用其他数量,比如采用四个,同样能够起到相同的传动的效果。
26.根据本发明的另一个实施例,如图3所示,所述动力输入轴140的右端部142伸出所述右太阳轮171,且所述右内齿圈173的中心转动设置在所述动力输入轴140的右端部142上。
27.根据本发明的另一个实施例,如图2、图3和图6所示,位于所述左圆锥齿轮110和所述右圆锥齿轮120之间的所述动力输入轴140上固定设置有动力连接轮300,所述动力连接轮300采用圆锥齿轮,所述动力连接轮300由动力输入轮400实现动力输入。
28.根据本发明的另一个实施例,如图1和图8所示,所述转向控制系统200包括涡轮210、蜗杆220、驱动电机230、电机控制器240、左调速控制器250、右调速控制器260、双面转向齿条270、转向齿轮280和速度传感器290,所述涡轮210固定设置在所述差速输入轴150上,所述蜗杆220与所述驱动电机230的输出轴相连接并用于驱动所述涡轮210旋转,所述速度传感器290用于对车辆的传动轴201进行测速,所述转向齿轮280固定设置在车辆的转向轴202的下端,所述转向齿轮280与所述双面转向齿条270的一侧相啮合,所述左调速控制器250和所述右调速控制器260分别能够与所述双面转向齿条270的另一侧的两端相啮合,且所述双面转向齿条270的另一侧的齿条长度小于所述左调速控制器250与所述双面转向齿条270的啮合点至所述右调速控制器260与所述双面转向齿条270的啮合点之间的距离,所述左调速控制器250、所述右调速控制器260、所述驱动电机230和所述速度传感器290均与所述电机控制器240信号互连。
29.根据本发明的另一个实施例,如图8所示,所述左调速控制器250包括左固定轴251、左调速控制齿轮252和左转速传感器253,所述左调速控制齿轮252转动设置在所述左
固定轴251上,所述左转速传感器253用于测量所述左调速控制齿轮252的方向和位置,所述左转速传感器253与所述电机控制器240信号互连。
30.根据本发明的另一个实施例,如图8所示,所述右调速控制器260包括右固定轴261、右调速控制齿轮262和右转速传感器263,所述右调速控制齿轮262转动设置在所述右固定轴261上,所述右转速传感器263用于测量所述右调速控制齿轮262的方向和位置,所述右转速传感器263与所述电机控制器240信号互连。
31.根据本发明的另一个实施例,如图2和图3所示,所述左轮输出模块180采用轮轴。该实施例中,所述左轮输出模块180采用轮轴,很显然,也可以采用其他类型,比如采用轮毂。
32.根据本发明的另一个实施例,如图2和图3所示,所述右轮输出模块190采用轮轴。该实施例中,所述右轮输出模块190采用轮轴,很显然,也可以采用其他类型,比如采用轮毂。
33.本发明的工作方法(或工作原理):当车辆转弯时,速度传感器290监测到车辆的传动轴201处于旋转状态,车辆方向盘向左或向右转动带动转向轴202向左或向右转动,固定设置在车辆的转向轴202的下端的转向齿轮280带动双面转向齿条270向左或向右移动,进而双面转向齿条270带动左调速控制器250或右调速控制器260移动并啮合,电机控制器240监测到左调速控制器250或右调速控制器260的信号后控制驱动电机230正转或反转,进而通过蜗杆220和涡轮210的传动,进而带动差速圆锥齿轮130正转或反转,使得左内齿圈163和右内齿圈173以不同转速转动带动左轮输出模块180和右轮输出模块190以不同转速转动,进而实现车辆的转弯。具体地,由于差速圆锥齿轮130旋转带动左圆锥齿轮110和右圆锥齿轮120以相反的方向旋转,使得转动设置在左圆锥齿轮110和右圆锥齿轮120的外端面上的左行星轮162和右行星轮172以相反的方向以动力输入轴140为轴心进行旋转,从而使得左轮输出模块180的转速增加或减少,同时使得左轮输出模块180的转速的变化量补偿给右轮输出模块190,即当左轮输出模块180的转速增加某一数值时右轮输出模块190的转速会相应的减少相同的数值。
34.当车辆直行时,速度传感器290监测到车辆的传动轴201处于旋转状态,左调速控制器250和右调速控制器260同时与双面转向齿条270处于分离状态,左调速控制器250和右调速控制器260不会产生信号,涡轮210和蜗杆220具有自锁功能,差速圆锥齿轮130处于静止状态,使得左圆锥齿轮110和右圆锥齿轮120处于锁止状态,进而使得左内齿圈163和右内齿圈173等速转动,使得左轮输出模块180和右轮输出模块190等速转动,实现车辆直行。
35.当车辆原地不动时,速度传感器290监测到车辆的传动轴201处于停止状态,此时电机控制器240控制驱动电机230处于停止状态。
36.本发明具有结构和制造工艺简单的优点,而且制造成本低,转向控制方便,有利于推广使用。
37.在本发明中,除非另有明确的规定和限定,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定,对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
38.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1