一种圆柱齿轮与行星轮组合式电动助力循环球转向器的制作方法
1.本发明涉及一种圆柱齿轮与行星轮组合式电动助力循环球转向器,用于中型及重型车。
背景技术:
2.商用车转向系统的发展经历了从简单的机械转向、液压助力转向到电动液压助力转向,直到更为节能、操纵性更好的纯电动转向系统的出现。纯电转向系统不仅节约能源,提高安全性,还有利于保护环境,是一项紧扣现代汽车发展主题的高新技术,是汽车转向系统发展的必然趋势。
3.目前的纯电转向系统,只能满足轻型卡车的助力要求。对于中重型卡车,市场上暂无纯电的转向系统。
4.轻型卡车用的纯电转向系统基本都采用蜗轮蜗杆减速,直接助力于螺杆的形式。其主要缺点是效率低,承载能力小。
5.该形式的转向器如果扩展到中重型卡车上时,由于车重增加,需要的助力同比例增大。而这部分非常大的助力同样需要通过蜗轮蜗杆、螺杆、钢球、螺母及相应的轴承来传递,从而导致转向器的体积及自重都将过大,整车布置难度加大。
6.鉴于以上原因,我们发明了一种适用于中、重型卡车的纯电转向系统。其优点是助力直接作用于臂轴,且保留了原有的传统循环球转向器。具有效率高,承载能力大,体积小,重量轻,且易于整车布置的优点。
技术实现要素:
7.本发明的目的在于提供一种圆柱齿轮与行星轮组合式电动助力循环球转向器,该转向器将上述两种力分开传递,来自于方向盘的操作力仍然通过机械式循环球转向器总成进行传递,而电机助力则通过初级减速器总成、圆柱齿轮减速器总成、带有行星轮减速机构的转向臂轴总成进行传递。这样,带有行星轮减速机构的转向臂轴的齿扇只传递来自于方向盘的操作力,而不传递来自于电机的助力,因此螺杆、螺母、钢球等不再承受过大的载荷。而电机的助力通过初级减速器总成、圆柱齿轮减速器总成、带有行星轮减速机构的转向臂轴总成传递,具有体积小、重量轻,易整车布置等优点。
8.本发明的技术方案是这样实现的:一种圆柱齿轮与行星轮组合式的电动助力循环球转向器,包括动力单元总成,初级减速器总成,圆柱齿轮减速器总成,齿轮箱侧盖总成,机械式循环球转向器总成以及带有行星轮减速机构的转向臂轴总成;其特征在于:动力单元总成及初级减速器总成通过动力单元总成固定螺栓与机械式循环球转向器总成固定在一起;圆柱齿轮减速器总成装配在齿轮箱侧盖总成及机械式循环球转向器之间;齿轮箱侧盖总成通过齿轮箱侧盖固定螺栓与机械式循环球转向器总成固定在一起。内齿圈通过内齿圈固定螺栓与机械式循环球转向器总成固定在一起。带有行星轮减速机构的转向臂轴总成通过臂轴输入端轴承及臂轴输出端轴承装配在机械式循环球转向器总成上,然后通过转向臂
轴固定螺母进行轴向固定。
9.其中动力单元总成由电机与控制器组成,电机与控制器是集成在一起的。
10.初级减速器总成由初级减速器销轴、第一齿轮、初级减速器滚针轴承、初级减速器行星轮、初级减速器垫片、初级减速器副行星架、螺钉、初级减速器内齿圈及初级减速器太阳轮组成;初级减速器销轴与第一齿轮内孔过盈压装在一起,初级减速器行星轮与初级减速器滚针轴承外圈过盈压装在一起,初级减速器行星轮与初级减速器垫片共同装入初级减速器销轴,初级减速器副行星架通过螺钉固定在初级减速器销轴上。初级减速器内齿圈通过动力单元总成固定螺栓与壳体固定在一起。初级减速器太阳轮为电机的输出端。
11.圆柱齿轮减速器总成由第一齿轮、第一轴锁紧螺母、第二轴固定轴承、第一轴固定轴承、第一轴滚针轴承、第三齿轮、第二轴滚针轴承、第三轴滚针轴承、第二齿轮、第四齿轮、第五齿轮、转向臂轴太阳轮、第六齿轮、第四轴固定轴承及第三轴固定轴承组成;第一轴滚针轴承外圈过盈压装在齿轮箱侧盖上,第一齿轮一侧与第一轴滚针轴承配合,另一侧通过第一轴固定轴承及第一轴锁紧螺母固定在壳体上;第二轴滚针轴承外圈过盈压装在壳体上,第三齿轮与第二齿轮过盈压装在一起,一侧通过第二轴固定轴承固定在齿轮箱侧盖上,另一侧与第二轴滚针轴承配合,第二齿轮与第一齿轮相互啮合;第三轴滚针轴承外圈过盈压装在壳体上,第四齿轮与第五齿轮过盈压装在一起,一侧通过第三轴固定轴承固定在齿轮箱侧盖上,另一侧与第三轴滚针轴承配合,第四齿轮与第三齿轮相互啮合;转向臂轴太阳轮与第六齿轮过盈压装在一起,一侧通过第四轴固定轴承固定在齿轮箱侧盖上,另一侧与第四轴滚针轴承配合,第六齿轮与第五齿轮相互啮合。
12.齿轮箱侧盖总成由第三轴锁紧螺母、第二轴锁紧螺母、第三轴o型圈、第二轴o型圈、齿轮箱侧盖、第四轴锁紧螺母、第四轴o型圈、堵盖、堵盖固定螺栓组成;第三轴锁紧螺母将第三轴固定轴承固定在齿轮箱侧盖上,第三轴锁紧螺母与齿轮箱侧盖之间用第三轴o型圈密封;第二轴锁紧螺母将第二轴固定轴承固定在齿轮箱侧盖上,第二轴锁紧螺母与齿轮箱侧盖之间用第二轴o型圈密封;第四轴锁紧螺母将第四轴固定轴承固定在齿轮箱侧盖上,堵盖通过堵盖固定螺栓与齿轮箱侧盖固定在一起,堵盖与齿轮箱侧盖之间用第四轴o型圈密封。
13.机械式循环球转向器总成由下盖固定螺栓、下盖、螺杆固定轴承、螺杆锁紧螺母、螺杆、螺母、导管、导管夹、导管夹固定螺栓、钢球、传感器转子、下盖o型圈、壳体、圆柱销、扭杆、螺杆上端轴承、螺杆上端油封、传感器、输入轴、孔用弹性挡圈、输入轴轴承、输入轴油封、上盖o型圈、线束密封圈、上盖、上盖固定螺栓、防尘封、防尘盖组成。
14.螺杆上端轴承及螺杆上端油封外圈过盈压装在壳体上;传感器转子通过激光焊接在螺杆上,螺母通过钢球、导管、导管夹、导管夹固定螺栓与螺杆装配在一起。螺杆一侧通过螺杆固定轴承及螺杆锁紧螺母固定在下盖上,另一侧与螺杆上端轴承及螺杆上端油封配合。下盖通过下盖固定螺栓固定在壳体上,下盖与壳体之间用下盖o型圈密封;输入轴轴承过盈装配在输入轴上,传感器通过激光焊接在输入轴上。输入轴油封及输入轴轴承装配在上盖一侧,并通过孔用弹性挡圈固定。上盖通过上盖固定螺栓固定在
壳体上。上盖与壳体之间用上盖o型圈密封。输入轴与螺杆之间用扭杆连接,并通过圆柱销分别与输入轴和螺杆固定在一起。上盖另一侧装有防尘封及防尘盖,上侧装有线束密封圈用于引出传感器线束并起到密封作用。
15.带有行星轮减速机构的转向臂轴总成由转向臂轴销轴、转向臂轴副行星架、转向臂轴行星轮滚针轴承、转向臂轴行星轮、转向臂轴行星轮垫片、锁紧螺母、转向臂轴螺栓、第四轴滚针轴承及转向臂轴组成;第四轴滚针轴承外圈过盈压装在转向臂轴上,转向臂轴螺栓通过锁紧螺母固定在转向臂轴上;转向臂轴副行星架与转向臂轴通过焊接固定在一起,转向臂轴销轴过盈压装在转向臂轴副行星架与转向臂轴上。转向臂轴行星轮滚针轴承通过过盈压装与转向臂轴行星轮固定在一起,转向臂轴行星轮装配在转向臂轴销轴上,转向臂轴行星轮两侧装有转向臂轴行星轮垫片。
16.本发明的积极效果是带有行星轮减速机构的转向臂轴的齿扇只传递来自于方向盘的操作力,而不传递来自于电机的助力,因此螺杆、螺母、钢球等不再承受过大的载荷。而电机的助力通过初级减速器总成、圆柱齿轮减速器总成、带有行星轮减速机构的转向臂轴总成传递,具有体积小、重量轻,易整车布置等优点。
附图说明
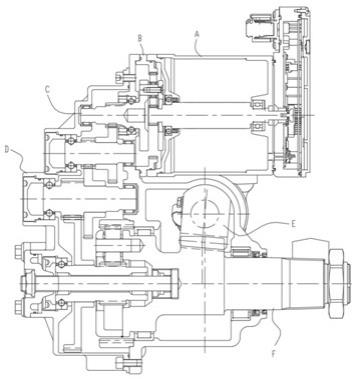
17.图1是本发明一种圆柱齿轮与行星轮组合式的循环球电动助力转向器的剖视图。
18.图2是本发明一种圆柱齿轮与行星轮组合式的循环球电动助力转向器的轴测图。
19.图3是本发明的动力单元总成的轴测图。
20.图4是本发明的初级减速器总成的轴测图。
21.图5是本发明的圆柱齿轮减速器总成及齿轮箱侧盖总成的轴测图。
22.图6是本发明的机械式循环球转向器总成的轴测图。
23.图7是本发明的带有行星轮减速机构的转向臂轴总成的轴测图。
24.图8是本发明实施例2的实施图。
25.图9是本发明实施2的示意图。
26.图10是本发明的实施3的实施图。
27.图11是本发明的实施3的示意图。
28.图12是本发明的实施4的实施图。
29.图13是本发明的实施4的示意图。
30.图14是本发明的实施例5的示意图。
具体实施方式
31.下面结合附图对本发明做进一步的描述:实施例1如图1-7所示,一种圆柱齿轮与行星轮组合式的电动助力循环球转向器,动力单元总成a及初级减速器总成b通过动力单元总成固定螺栓1与机械式循环球转向器总成e固定在一起。圆柱齿轮减速器总成c装配在齿轮箱侧盖总成d及机械式循环球转向器e之间;齿轮箱侧盖总成d通过齿轮箱侧盖固定螺栓2与机械式循环球转向器总成e固定在一起。内齿圈5通过内齿圈固定螺栓4与机械式循环球转向器总成e固定在一起。带有行星轮减速机构的转
向臂轴总成f通过臂轴输入端轴承6及臂轴输出端轴承7装配在机械式循环球转向器总成e上,然后通过转向臂轴固定螺母3进行轴向固定。
32.动力单元总成a由电机8与控制器9组成,电机8与控制器9是集成在一起的。
33.初级减速器总成b由初级减速器销轴10、第一齿轮11、初级减速器滚针轴承12、初级减速器行星轮13、初级减速器垫片14、初级减速器副行星架15、螺钉16、初级减速器内齿圈17及初级减速器太阳轮18组成;初级减速器销轴10与第一齿轮11内孔过盈压装在一起,初级减速器行星轮13与初级减速器滚针轴承12外圈过盈压装在一起,初级减速器行星轮13与初级减速器垫片14共同装入初级减速器销轴10,初级减速器副行星架15通过螺钉16固定在初级减速器销轴10上。初级减速器内齿圈17通过动力单元总成固定螺栓1与壳体31固定在一起,初级减速器太阳轮18为电机8的输出端。
34.圆柱齿轮减速器总成c由第一齿轮11、第一轴锁紧螺母24、第二轴固定轴承25、第一轴固定轴承26、第一轴滚针轴承27、第三齿轮28、第二轴滚针轴承29、第三轴滚针轴承30、第二齿轮32、第四齿轮34、第五齿轮33、转向臂轴太阳轮35、第六齿轮36、第四轴固定轴承37及第三轴固定轴承38组成;第一轴滚针轴承27外圈过盈压装在齿轮箱侧盖23上,第一齿轮11一侧与第一轴滚针轴承27配合,另一侧通过第一轴固定轴承26及第一轴锁紧螺母24固定在壳体31上;第二轴滚针轴承29外圈过盈压装在壳体31上,第三齿轮28与第二齿轮32过盈压装在一起,一侧通过第二轴固定轴承25固定在齿轮箱侧盖23上,另一侧与第二轴滚针轴承29配合,第二齿轮32与第一齿轮11相互啮合;第三轴滚针轴承30外圈过盈压装在壳体31上,第四齿轮34与第五齿轮33过盈压装在一起,一侧通过第三轴固定轴承38固定在齿轮箱侧盖23上,另一侧与第三轴滚针轴承30配合,第四齿轮34与第三齿轮28相互啮合;转向臂轴太阳轮35与第六齿轮36过盈压装在一起,一侧通过第四轴固定轴承37固定在齿轮箱侧盖23上,另一侧与第四轴滚针轴承77配合。第六齿轮36与第五齿轮33相互啮合。
35.齿轮箱侧盖总成d由第三轴锁紧螺母19、第二轴锁紧螺母20、第三轴o型圈21、第二轴o型圈22、齿轮箱侧盖23、第四轴锁紧螺母39、第四轴o型圈40、堵盖41、堵盖固定螺栓42组成;第三轴锁紧螺母19将第三轴固定轴承38固定在齿轮箱侧盖23上,第三轴锁紧螺母19与齿轮箱侧盖23之间用第三轴o型圈21密封;第二轴锁紧螺母20将第二轴固定轴承25固定在齿轮箱侧盖23上,第二轴锁紧螺母20与齿轮箱侧盖23之间用第二轴o型圈22密封;第四轴锁紧螺母39将第四轴固定轴承37固定在齿轮箱侧盖23上。堵盖41通过堵盖固定螺栓42与齿轮箱侧盖23固定在一起,堵盖41与齿轮箱侧盖23之间用第四轴o型圈40密封。
36.机械式循环球转向器总成e由下盖固定螺栓43、下盖44、螺杆固定轴承45、螺杆锁紧螺母46、螺杆47、螺母48、导管49、导管夹50、导管夹固定螺栓51、钢球52、传感器转子53、下盖o型圈54、壳体31、圆柱销55、扭杆56、螺杆上端轴承57、螺杆上端油封58、传感器59、输入轴60、孔用弹性挡圈61、输入轴轴承62、输入轴油封63、上盖o型圈64、线束密封圈65、上盖66、上盖固定螺栓67、防尘封68、防尘盖69组成;螺杆上端轴承57及螺杆上端油封58外圈过
盈压装在壳体31上;传感器转子53通过激光焊接在螺杆52上。螺母48通过钢球52、导管49、导管夹50、导管夹固定螺栓51与螺杆47装配在一起。螺杆47一侧通过螺杆固定轴承45及螺杆锁紧螺母46固定在下盖44上,另一侧与螺杆上端轴承57及螺杆上端油封58配合。下盖44通过下盖固定螺栓43固定在壳体31上,下盖44与壳体31之间用下盖o型圈54密封;输入轴轴承62过盈装配在输入轴60上,传感器59通过激光焊接在输入轴60上。输入轴油封63及输入轴轴承62装配在上盖66一侧,并通过孔用弹性挡圈61固定。上盖66通过上盖固定螺栓67固定在壳体31上。上盖66与壳体31之间用上盖o型圈64密封。输入轴60与螺杆47之间用扭杆56连接,并通过圆柱销55分别与输入轴60和螺杆47固定在一起。上盖66另一侧装有防尘封68及防尘盖69,上侧装有线束密封圈65,用于引出传感器线束并起到密封作用。
37.带有行星轮减速机构的转向臂轴总成f由转向臂轴销轴70、转向臂轴副行星架71、转向臂轴行星轮滚针轴承72、转向臂轴行星轮73、转向臂轴行星轮垫片74、锁紧螺母75、转向臂轴螺栓76、第四轴滚针轴承77及转向臂轴78组成;第四轴滚针轴承77外圈过盈压装在转向臂轴78上,转向臂轴螺栓76通过锁紧螺母75固定在转向臂轴上;转向臂轴副行星架71与转向臂轴78通过焊接固定在一起,转向臂轴销轴70过盈压装在转向臂轴副行星架71与转向臂轴78上。转向臂轴行星轮滚针轴承72通过过盈压装与转向臂轴行星轮73固定在一起,转向臂轴行星轮73装配在转向臂轴销轴70上,转向臂轴行星轮73两侧装有转向臂轴行星轮垫片74;方向盘输入的操作力,传递给输入轴60,输入轴60转动带动扭杆56扭转变形,扭杆56将扭矩输入给螺杆47,带动螺杆47转动,螺杆47通过钢球52驱动螺母48运动,螺母48将输入轴的扭转运动变换为直线运动,通过螺母48上的齿扇传递给带有行星轮机构的转向臂轴78上的齿扇,驱动带有行星轮机构的转向臂轴78进行转动,最终将方向盘的操作力通过带有行星轮机构的转向臂轴78的输出端花键输出;传感器59与传感器转子53分别焊接在输入轴60与螺杆47上,当扭杆56扭转变形时,即可测量输入轴60与螺杆47之间的相对转角,并将测得的转角信号输出给控制器9;控制器9得到传感器59的转角信号后,控制器9根据内部程序驱动电机8转动。
38.电机8输出的助力通过初级减速器总成b、圆柱齿轮减速器总成c、带有行星轮减速机构的转向臂轴总成f带动转向臂轴78转动,最终将电机8的助力通过输出花键输出。
39.实施例2如图8-9所示,初级减速器总成b由行星轮传动更改为锥齿轮传动。
40.动力单元总成a及初级减速器总成b通过动力单元总成固定螺栓1与机械式循环球转向器总成e固定在一起。圆柱齿轮减速器总成c装配在齿轮箱侧盖总成d及机械式循环球转向器e之间;齿轮箱侧盖总成d通过齿轮箱侧盖固定螺栓2与机械式循环球转向器总成e固定在一起。内齿圈5通过内齿圈固定螺栓4与机械式循环球转向器总成e固定在一起。带有行星轮减速机构的转向臂轴总成f通过臂轴输入端轴承6及臂轴输出端轴承7装配在机械式循环球转向器总成e上,然后通过转向臂轴固定螺母3进行轴向固定。
41.动力单元总成a由电机8与控制器9组成。电机8与控制器9是集成在一起的。
42.初级减速器总成b由大圆锥齿轮79及小圆锥齿轮80组成;大圆锥齿轮79固定在壳体31上,小圆锥齿轮80为电机8的输出端。
43.圆柱齿轮减速器总成c由第一齿轮11、第一轴锁紧螺母24、第二轴固定轴承25、第
一轴固定轴承26、第一轴滚针轴承27、第三齿轮28、第二轴滚针轴承29、第三轴滚针轴承30、第二齿轮32、第四齿轮34、第五齿轮33、转向臂轴太阳轮35、第六齿轮36、第四轴固定轴承37及第三轴固定轴承38组成;第一轴滚针轴承27外圈过盈压装在齿轮箱侧盖23上,第一齿轮11一侧与第一轴滚针轴承27配合,另一侧通过第一轴固定轴承26及第一轴锁紧螺母24固定在壳体31上;第二轴滚针轴承29外圈过盈压装在壳体31上,第三齿轮28与第二齿轮32过盈压装在一起,一侧通过第二轴固定轴承25固定在齿轮箱侧盖23上,另一侧与第二轴滚针轴承29配合,第二齿轮32与第一齿轮11相互啮合;第三轴滚针轴承30外圈过盈压装在壳体31上,第四齿轮34与第五齿轮33过盈压装在一起,一侧通过第三轴固定轴承38固定在齿轮箱侧盖23上,另一侧与第三轴滚针轴承30配合,第四齿轮34与第三齿轮28相互啮合;转向臂轴太阳轮35与第六齿轮36过盈压装在一起,一侧通过第四轴固定轴承37固定在齿轮箱侧盖23上,另一侧与第四轴滚针轴承77配合。第六齿轮36与第五齿轮33相互啮合。
44.齿轮箱侧盖总成d由第三轴锁紧螺母19、第二轴锁紧螺母20、第三轴o型圈21、第二轴o型圈22、齿轮箱侧盖23、第四轴锁紧螺母39、第四轴o型圈40、堵盖41、堵盖固定螺栓42组成;第三轴锁紧螺母19将第三轴固定轴承38固定在齿轮箱侧盖23上,第三轴锁紧螺母19与齿轮箱侧盖23之间用第三轴o型圈21密封;第二轴锁紧螺母20将第二轴固定轴承25固定在齿轮箱侧盖23上,第二轴锁紧螺母20与齿轮箱侧盖23之间用第二轴o型圈22密封;第四轴锁紧螺母39将第四轴固定轴承37固定在齿轮箱侧盖23上。堵盖41通过堵盖固定螺栓42与齿轮箱侧盖23固定在一起,堵盖41与齿轮箱侧盖23之间用第四轴o型圈40密封。
45.机械式循环球转向器总成e由下盖固定螺栓43、下盖44、螺杆固定轴承45、螺杆锁紧螺母46、螺杆47、螺母48、导管49、导管夹50、导管夹固定螺栓51、钢球52、传感器转子53、下盖o型圈54、壳体31、圆柱销55、扭杆56、螺杆上端轴承57、螺杆上端油封58、传感器59、输入轴60、孔用弹性挡圈61、输入轴轴承62、输入轴油封63、上盖o型圈64、线束密封圈65、上盖66、上盖固定螺栓67、防尘封68、防尘盖69组成;螺杆上端轴承57及螺杆上端油封58外圈过盈压装在壳体31上;传感器转子53通过激光焊接在螺杆52上,螺母48通过钢球52、导管49、导管夹50、导管夹固定螺栓51与螺杆47装配在一起。螺杆47一侧通过螺杆固定轴承45及螺杆锁紧螺母46固定在下盖44上,另一侧与螺杆上端轴承57及螺杆上端油封58配合。下盖44通过下盖固定螺栓43固定在壳体31上,下盖44与壳体31之间用下盖o型圈54密封;输入轴轴承62过盈装配在输入轴60上,传感器59通过激光焊接在输入轴60上。输入轴油封63及输入轴轴承62装配在上盖66一侧,并通过孔用弹性挡圈61固定。上盖66通过上盖固定螺栓67固定在壳体31上,上盖66与壳体31之间用上盖o型圈64密封。输入轴60与螺杆47之间用扭杆56连接,并通过圆柱销55分别与输入轴60和螺杆47固定在一起。上盖66另一侧装有防尘封68及防尘盖69,上侧装有线束密封圈65,用于引出传感器线束并起到密封作用。
46.带有行星轮减速机构的转向臂轴总成f由转向臂轴销轴70、转向臂轴副行星架71、转向臂轴行星轮滚针轴承72、转向臂轴行星轮73、转向臂轴行星轮垫片74、锁紧螺母75、转向臂轴螺栓76、第四轴滚针轴承77及转向臂轴78组成;第四轴滚针轴承77外圈过盈压装在转向臂轴78上,转向臂轴螺栓76通过锁紧螺母75固定在转向臂轴上;转向臂轴副行星架71与转向臂轴78通过焊接固定在一起,转向臂轴销轴70过盈压装在转向臂轴副行星架71与转向臂轴78上。转向臂轴行星轮滚针轴承72通过过盈压装与转向臂轴行星轮73固定在一起,转向臂轴行星轮73装配在转向臂轴销轴70上,转向臂轴行星轮73两侧装有转向臂轴行星轮垫片74;方向盘输入的操作力,传递给输入轴60,输入轴60转动带动扭杆56扭转变形,扭杆56将扭矩输入给螺杆47,带动螺杆47转动,螺杆47通过钢球52驱动螺母48运动,螺母48将输入轴的扭转运动变换为直线运动,通过螺母48上的齿扇传递给带有行星轮机构的转向臂轴78上的齿扇,驱动带有行星轮机构的转向臂轴78进行转动,最终将方向盘的操作力通过带有行星轮机构的转向臂轴78的输出端花键输出。
47.传感器59与传感器转子53分别焊接在输入轴60与螺杆47上,当扭杆56扭转变形时,即可测量输入轴60与螺杆47之间的相对转角,并将测得的转角信号输出给控制器9;控制器9得到传感器59的转角信号后,控制器9根据内部程序驱动电机8转动。
48.电机8输出的助力通过初级减速器总成b、圆柱齿轮减速器总成c、带有行星轮减速机构的转向臂轴总成f带动转向臂轴78转动,最终将电机8的助力通过输出花键输出。
49.实施例3如图10-11所示,初级减速器总成b由行星轮传动更改为蜗轮蜗杆传动。
50.动力单元总成a及初级减速器总成b通过动力单元总成固定螺栓1与机械式循环球转向器总成e固定在一起。圆柱齿轮减速器总成c装配在齿轮箱侧盖总成d及机械式循环球转向器e之间;齿轮箱侧盖总成d通过齿轮箱侧盖固定螺栓2与机械式循环球转向器总成e固定在一起。内齿圈5通过内齿圈固定螺栓4与机械式循环球转向器总成e固定在一起。带有行星轮减速机构的转向臂轴总成f通过臂轴输入端轴承6及臂轴输出端轴承7装配在机械式循环球转向器总成e上,然后通过转向臂轴固定螺母3进行轴向固定。
51.动力单元总成a由电机8与控制器9组成;电机8与控制器9是集成在一起的。
52.初级减速器总成b由大圆锥齿轮81、蜗轮82及蜗杆83组成。
53.齿轮81与蜗轮82过盈压装在一起,固定在壳体31上,蜗杆83为电机8的输出端。
54.圆柱齿轮减速器总成c由第一齿轮11、第一轴锁紧螺母24、第二轴固定轴承25、第一轴固定轴承26、第一轴滚针轴承27、第三齿轮28、第二轴滚针轴承29、第三轴滚针轴承30、第二齿轮32、第四齿轮34、第五齿轮33、转向臂轴太阳轮35、第六齿轮36、第四轴固定轴承37及第三轴固定轴承38组成;第一轴滚针轴承27外圈过盈压装在齿轮箱侧盖23上,第一齿轮11一侧与第一轴滚针轴承27配合,另一侧通过第一轴固定轴承26及第一轴锁紧螺母24固定在壳体31上。
55.第二轴滚针轴承29外圈过盈压装在壳体31上,第三齿轮28与第二齿轮32过盈压装在一起,一侧通过第二轴固定轴承25固定在齿轮箱侧盖23上,另一侧与第二轴滚针轴承29配合,第二齿轮32与第一齿轮11相互啮合。
56.第三轴滚针轴承30外圈过盈压装在壳体31上,第四齿轮34与第五齿轮33过盈压装
在一起,一侧通过第三轴固定轴承38固定在齿轮箱侧盖23上,另一侧与第三轴滚针轴承30配合,第四齿轮34与第三齿轮28相互啮合。
57.转向臂轴太阳轮35与第六齿轮36过盈压装在一起,一侧通过第四轴固定轴承37固定在齿轮箱侧盖23上,另一侧与第四轴滚针轴承77配合。第六齿轮36与第五齿轮33相互啮合。
58.齿轮箱侧盖总成d由第三轴锁紧螺母19、第二轴锁紧螺母20、第三轴o型圈21、第二轴o型圈22、齿轮箱侧盖23、第四轴锁紧螺母39、第四轴o型圈40、堵盖41、堵盖固定螺栓42组成;第三轴锁紧螺母19将第三轴固定轴承38固定在齿轮箱侧盖23上,第三轴锁紧螺母19与齿轮箱侧盖23之间用第三轴o型圈21密封。
59.第二轴锁紧螺母20将第二轴固定轴承25固定在齿轮箱侧盖23上,第二轴锁紧螺母20与齿轮箱侧盖23之间用第二轴o型圈22密封。
60.第四轴锁紧螺母39将第四轴固定轴承37固定在齿轮箱侧盖23上。堵盖41通过堵盖固定螺栓42与齿轮箱侧盖23固定在一起,堵盖41与齿轮箱侧盖23之间用第四轴o型圈40密封。
61.机械式循环球转向器总成e由下盖固定螺栓43、下盖44、螺杆固定轴承45、螺杆锁紧螺母46、螺杆47、螺母48、导管49、导管夹50、导管夹固定螺栓51、钢球52、传感器转子53、下盖o型圈54、壳体31、圆柱销55、扭杆56、螺杆上端轴承57、螺杆上端油封58、传感器59、输入轴60、孔用弹性挡圈61、输入轴轴承62、输入轴油封63、上盖o型圈64、线束密封圈65、上盖66、上盖固定螺栓67、防尘封68、防尘盖69组成;螺杆上端轴承57及螺杆上端油封58外圈过盈压装在壳体31上。
62.传感器转子53通过激光焊接在螺杆52上。螺母48通过钢球52、导管49、导管夹50、导管夹固定螺栓51与螺杆47装配在一起。螺杆47一侧通过螺杆固定轴承45及螺杆锁紧螺母46固定在下盖44上,另一侧与螺杆上端轴承57及螺杆上端油封58配合。下盖44通过下盖固定螺栓43固定在壳体31上,下盖44与壳体31之间用下盖o型圈54密封。
63.输入轴轴承62过盈装配在输入轴60上,传感器59通过激光焊接在输入轴60上。输入轴油封63及输入轴轴承62装配在上盖66一侧,并通过孔用弹性挡圈61固定。上盖66通过上盖固定螺栓67固定在壳体31上。上盖66与壳体31之间用上盖o型圈64密封。输入轴60与螺杆47之间用扭杆56连接,并通过圆柱销55分别与输入轴60和螺杆47固定在一起。上盖66另一侧装有防尘封68及防尘盖69,上侧装有线束密封圈65,用于引出传感器线束并起到密封作用。
64.带有行星轮减速机构的转向臂轴总成f由转向臂轴销轴70、转向臂轴副行星架71、转向臂轴行星轮滚针轴承72、转向臂轴行星轮73、转向臂轴行星轮垫片74、锁紧螺母75、转向臂轴螺栓76、第四轴滚针轴承77及转向臂轴78组成;第四轴滚针轴承77外圈过盈压装在转向臂轴78上,转向臂轴螺栓76通过锁紧螺母75固定在转向臂轴上。
65.转向臂轴副行星架71与转向臂轴78通过焊接固定在一起,转向臂轴销轴70过盈压装在转向臂轴副行星架71与转向臂轴78上。转向臂轴行星轮滚针轴承72通过过盈压装与转向臂轴行星轮73固定在一起,转向臂轴行星轮73装配在转向臂轴销轴70上,转向臂轴行星
轮73两侧装有转向臂轴行星轮垫片74。
66.方向盘输入的操作力,传递给输入轴60,输入轴60转动带动扭杆56扭转变形,扭杆56将扭矩输入给螺杆47,带动螺杆47转动,螺杆47通过钢球52驱动螺母48运动,螺母48将输入轴的扭转运动变换为直线运动,通过螺母48上的齿扇传递给带有行星轮机构的转向臂轴78上的齿扇,驱动带有行星轮机构的转向臂轴78进行转动,最终将方向盘的操作力通过带有行星轮机构的转向臂轴78的输出端花键输出。
67.传感器59与传感器转子53分别焊接在输入轴60与螺杆47上,当扭杆56扭转变形时,即可测量输入轴60与螺杆47之间的相对转角,并将测得的转角信号输出给控制器9。
68.控制器9得到传感器59的转角信号后,控制器9根据内部程序驱动电机8转动。
69.电机8输出的助力通过初级减速器总成b、圆柱齿轮减速器总成c、带有行星轮减速机构的转向臂轴总成f带动转向臂轴78转动,最终将电机8的助力通过输出花键输出。
70.实施例4如图12-13所示,初级减速器总成b由行星轮传动更改为带传动。
71.动力单元总成a及初级减速器总成b通过动力单元总成固定螺栓1与机械式循环球转向器总成e固定在一起。圆柱齿轮减速器总成c装配在齿轮箱侧盖总成d及机械式循环球转向器e之间;齿轮箱侧盖总成d通过齿轮箱侧盖固定螺栓2与机械式循环球转向器总成e固定在一起。内齿圈5通过内齿圈固定螺栓4与机械式循环球转向器总成e固定在一起。带有行星轮减速机构的转向臂轴总成f通过臂轴输入端轴承6及臂轴输出端轴承7装配在机械式循环球转向器总成e上,然后通过转向臂轴固定螺母3进行轴向固定。
72.动力单元总成a由电机8与控制器9组成;电机8与控制器9是集成在一起的。
73.初级减速器总成b由小带轮84、皮带85、齿轮86及大带轮87组成;齿轮86与大带轮87过盈压装在一起,小带轮84通过皮带85与大带轮87连接小带轮84为电机8的输出端。
74.圆柱齿轮减速器总成c由第一齿轮11、第一轴锁紧螺母24、第二轴固定轴承25、第一轴固定轴承26、第一轴滚针轴承27、第三齿轮28、第二轴滚针轴承29、第三轴滚针轴承30、第二齿轮32、第四齿轮34、第五齿轮33、转向臂轴太阳轮35、第六齿轮36、第四轴固定轴承37及第三轴固定轴承38组成;第一轴滚针轴承27外圈过盈压装在齿轮箱侧盖23上,第一齿轮11一侧与第一轴滚针轴承27配合,另一侧通过第一轴固定轴承26及第一轴锁紧螺母24固定在壳体31上。
75.第二轴滚针轴承29外圈过盈压装在壳体31上,第三齿轮28与第二齿轮32过盈压装在一起,一侧通过第二轴固定轴承25固定在齿轮箱侧盖23上,另一侧与第二轴滚针轴承29配合,第二齿轮32与第一齿轮11相互啮合。
76.第三轴滚针轴承30外圈过盈压装在壳体31上,第四齿轮34与第五齿轮33过盈压装在一起,一侧通过第三轴固定轴承38固定在齿轮箱侧盖23上,另一侧与第三轴滚针轴承30配合,第四齿轮34与第三齿轮28相互啮合。
77.转向臂轴太阳轮35与第六齿轮36过盈压装在一起,一侧通过第四轴固定轴承37固定在齿轮箱侧盖23上,另一侧与第四轴滚针轴承77配合。第六齿轮36与第五齿轮33相互啮合。
78.齿轮箱侧盖总成d由第三轴锁紧螺母19、第二轴锁紧螺母20、第三轴o型圈21、第二
轴o型圈22、齿轮箱侧盖23、第四轴锁紧螺母39、第四轴o型圈40、堵盖41、堵盖固定螺栓42组成。
79.第三轴锁紧螺母19将第三轴固定轴承38固定在齿轮箱侧盖23上,第三轴锁紧螺母19与齿轮箱侧盖23之间用第三轴o型圈21密封。
80.第二轴锁紧螺母20将第二轴固定轴承25固定在齿轮箱侧盖23上,第二轴锁紧螺母20与齿轮箱侧盖23之间用第二轴o型圈22密封。
81.第四轴锁紧螺母39将第四轴固定轴承37固定在齿轮箱侧盖23上。堵盖41通过堵盖固定螺栓42与齿轮箱侧盖23固定在一起,堵盖41与齿轮箱侧盖23之间用第四轴o型圈40密封。
82.机械式循环球转向器总成e由下盖固定螺栓43、下盖44、螺杆固定轴承45、螺杆锁紧螺母46、螺杆47、螺母48、导管49、导管夹50、导管夹固定螺栓51、钢球52、传感器转子53、下盖o型圈54、壳体31、圆柱销55、扭杆56、螺杆上端轴承57、螺杆上端油封58、传感器59、输入轴60、孔用弹性挡圈61、输入轴轴承62、输入轴油封63、上盖o型圈64、线束密封圈65、上盖66、上盖固定螺栓67、防尘封68、防尘盖69组成。
83.螺杆上端轴承57及螺杆上端油封58外圈过盈压装在壳体31上。
84.传感器转子53通过激光焊接在螺杆52上。螺母48通过钢球52、导管49、导管夹50、导管夹固定螺栓51与螺杆47装配在一起。螺杆47一侧通过螺杆固定轴承45及螺杆锁紧螺母46固定在下盖44上,另一侧与螺杆上端轴承57及螺杆上端油封58配合。下盖44通过下盖固定螺栓43固定在壳体31上,下盖44与壳体31之间用下盖o型圈54密封。
85.输入轴轴承62过盈装配在输入轴60上,传感器59通过激光焊接在输入轴60上。输入轴油封63及输入轴轴承62装配在上盖66一侧,并通过孔用弹性挡圈61固定。上盖66通过上盖固定螺栓67固定在壳体31上。上盖66与壳体31之间用上盖o型圈64密封。输入轴60与螺杆47之间用扭杆56连接,并通过圆柱销55分别与输入轴60和螺杆47固定在一起。上盖66另一侧装有防尘封68及防尘盖69,上侧装有线束密封圈65,用于引出传感器线束并起到密封作用。
86.带有行星轮减速机构的转向臂轴总成f由转向臂轴销轴70、转向臂轴副行星架71、转向臂轴行星轮滚针轴承72、转向臂轴行星轮73、转向臂轴行星轮垫片74、锁紧螺母75、转向臂轴螺栓76、第四轴滚针轴承77及转向臂轴78组成。
87.第四轴滚针轴承77外圈过盈压装在转向臂轴78上,转向臂轴螺栓76通过锁紧螺母75固定在转向臂轴上。
88.转向臂轴副行星架71与转向臂轴78通过焊接固定在一起,转向臂轴销轴70过盈压装在转向臂轴副行星架71与转向臂轴78上。转向臂轴行星轮滚针轴承72通过过盈压装与转向臂轴行星轮73固定在一起,转向臂轴行星轮73装配在转向臂轴销轴70上,转向臂轴行星轮73两侧装有转向臂轴行星轮垫片74。
89.方向盘输入的操作力,传递给输入轴60,输入轴60转动带动扭杆56扭转变形,扭杆56将扭矩输入给螺杆47,带动螺杆47转动,螺杆47通过钢球52驱动螺母48运动,螺母48将输入轴的扭转运动变换为直线运动,通过螺母48上的齿扇传递给带有行星轮机构的转向臂轴78上的齿扇,驱动带有行星轮机构的转向臂轴78进行转动,最终将方向盘的操作力通过带有行星轮机构的转向臂轴78的输出端花键输出。
90.传感器59与传感器转子53分别焊接在输入轴60与螺杆47上,当扭杆56扭转变形时,即可测量输入轴60与螺杆47之间的相对转角,并将测得的转角信号输出给控制器9。
91.控制器9得到传感器59的转角信号后,控制器9根据内部程序驱动电机8转动。
92.电机8输出的助力通过初级减速器总成b、圆柱齿轮减速器总成c、带有行星轮减速机构的转向臂轴总成f带动转向臂轴78转动,最终将电机8的助力通过输出花键输出。
93.实施例5如图14所示,动力单元总成a为分体式。
94.动力单元总成a及初级减速器总成b通过动力单元总成固定螺栓1与机械式循环球转向器总成e固定在一起。圆柱齿轮减速器总成c装配在齿轮箱侧盖总成d及机械式循环球转向器e之间;齿轮箱侧盖总成d通过齿轮箱侧盖固定螺栓2与机械式循环球转向器总成e固定在一起。内齿圈5通过内齿圈固定螺栓4与机械式循环球转向器总成e固定在一起。带有行星轮减速机构的转向臂轴总成f通过臂轴输入端轴承6及臂轴输出端轴承7装配在机械式循环球转向器总成e上,然后通过转向臂轴固定螺母3进行轴向固定。
95.动力单元总成a由电机8、控制器9机线束88组成;电机8与控制器9通过线束88集成在一起的。
96.初级减速器总成b由初级减速器销轴10、第一齿轮11、初级减速器滚针轴承12、初级减速器行星轮13、初级减速器垫片14、初级减速器副行星架15、螺钉16、初级减速器内齿圈17及初级减速器太阳轮18组成。
97.初级减速器销轴10与第一齿轮11内孔过盈压装在一起,初级减速器行星轮13与初级减速器滚针轴承12外圈过盈压装在一起,初级减速器行星轮13与初级减速器垫片14共同装入初级减速器销轴10,初级减速器副行星架15通过螺钉16固定在初级减速器销轴10上。初级减速器内齿圈17通过动力单元总成固定螺栓1与壳体31固定在一起。初级减速器太阳轮18为电机8的输出端。
98.圆柱齿轮减速器总成c由第一齿轮11、第一轴锁紧螺母24、第二轴固定轴承25、第一轴固定轴承26、第一轴滚针轴承27、第三齿轮28、第二轴滚针轴承29、第三轴滚针轴承30、第二齿轮32、第四齿轮34、第五齿轮33、转向臂轴太阳轮35、第六齿轮36、第四轴固定轴承37及第三轴固定轴承38组成。
99.第一轴滚针轴承27外圈过盈压装在齿轮箱侧盖23上,第一齿轮11一侧与第一轴滚针轴承27配合,另一侧通过第一轴固定轴承26及第一轴锁紧螺母24固定在壳体31上。
100.第二轴滚针轴承29外圈过盈压装在壳体31上,第三齿轮28与第二齿轮32过盈压装在一起,一侧通过第二轴固定轴承25固定在齿轮箱侧盖23上,另一侧与第二轴滚针轴承29配合,第二齿轮32与第一齿轮11相互啮合。
101.第三轴滚针轴承30外圈过盈压装在壳体31上,第四齿轮34与第五齿轮33过盈压装在一起,一侧通过第三轴固定轴承38固定在齿轮箱侧盖23上,另一侧与第三轴滚针轴承30配合,第四齿轮34与第三齿轮28相互啮合。
102.转向臂轴太阳轮35与第六齿轮36过盈压装在一起,一侧通过第四轴固定轴承37固定在齿轮箱侧盖23上,另一侧与第四轴滚针轴承77配合。第六齿轮36与第五齿轮33相互啮合。
103.齿轮箱侧盖总成d由第三轴锁紧螺母19、第二轴锁紧螺母20、第三轴o型圈21、第二
轴o型圈22、齿轮箱侧盖23、第四轴锁紧螺母39、第四轴o型圈40、堵盖41、堵盖固定螺栓42组成。
104.第三轴锁紧螺母19将第三轴固定轴承38固定在齿轮箱侧盖23上,第三轴锁紧螺母19与齿轮箱侧盖23之间用第三轴o型圈21密封。
105.第二轴锁紧螺母20将第二轴固定轴承25固定在齿轮箱侧盖23上,第二轴锁紧螺母20与齿轮箱侧盖23之间用第二轴o型圈22密封。
106.第四轴锁紧螺母39将第四轴固定轴承37固定在齿轮箱侧盖23上。堵盖41通过堵盖固定螺栓42与齿轮箱侧盖23固定在一起,堵盖41与齿轮箱侧盖23之间用第四轴o型圈40密封。
107.机械式循环球转向器总成e由下盖固定螺栓43、下盖44、螺杆固定轴承45、螺杆锁紧螺母46、螺杆47、螺母48、导管49、导管夹50、导管夹固定螺栓51、钢球52、传感器转子53、下盖o型圈54、壳体31、圆柱销55、扭杆56、螺杆上端轴承57、螺杆上端油封58、传感器59、输入轴60、孔用弹性挡圈61、输入轴轴承62、输入轴油封63、上盖o型圈64、线束密封圈65、上盖66、上盖固定螺栓67、防尘封68、防尘盖69组成。
108.螺杆上端轴承57及螺杆上端油封58外圈过盈压装在壳体31上。
109.传感器转子53通过激光焊接在螺杆52上。螺母48通过钢球52、导管49、导管夹50、导管夹固定螺栓51与螺杆47装配在一起。螺杆47一侧通过螺杆固定轴承45及螺杆锁紧螺母46固定在下盖44上,另一侧与螺杆上端轴承57及螺杆上端油封58配合。下盖44通过下盖固定螺栓43固定在壳体31上,下盖44与壳体31之间用下盖o型圈54密封。
110.输入轴轴承62过盈装配在输入轴60上,传感器59通过激光焊接在输入轴60上。输入轴油封63及输入轴轴承62装配在上盖66一侧,并通过孔用弹性挡圈61固定。上盖66通过上盖固定螺栓67固定在壳体31上。上盖66与壳体31之间用上盖o型圈64密封。输入轴60与螺杆47之间用扭杆56连接,并通过圆柱销55分别与输入轴60和螺杆47固定在一起。上盖66另一侧装有防尘封68及防尘盖69,上侧装有线束密封圈65,用于引出传感器线束并起到密封作用。
111.带有行星轮减速机构的转向臂轴总成f由转向臂轴销轴70、转向臂轴副行星架71、转向臂轴行星轮滚针轴承72、转向臂轴行星轮73、转向臂轴行星轮垫片74、锁紧螺母75、转向臂轴螺栓76、第四轴滚针轴承77及转向臂轴78组成。
112.第四轴滚针轴承77外圈过盈压装在转向臂轴78上,转向臂轴螺栓76通过锁紧螺母75固定在转向臂轴上。
113.转向臂轴副行星架71与转向臂轴78通过焊接固定在一起,转向臂轴销轴70过盈压装在转向臂轴副行星架71与转向臂轴78上。转向臂轴行星轮滚针轴承72通过过盈压装与转向臂轴行星轮73固定在一起,转向臂轴行星轮73装配在转向臂轴销轴70上,转向臂轴行星轮73两侧装有转向臂轴行星轮垫片74。
114.方向盘输入的操作力,传递给输入轴60,输入轴60转动带动扭杆56扭转变形,扭杆56将扭矩输入给螺杆47,带动螺杆47转动,螺杆47通过钢球52驱动螺母48运动,螺母48将输入轴的扭转运动变换为直线运动,通过螺母48上的齿扇传递给带有行星轮机构的转向臂轴78上的齿扇,驱动带有行星轮机构的转向臂轴78进行转动,最终将方向盘的操作力通过带有行星轮机构的转向臂轴78的输出端花键输出。
115.传感器59与传感器转子53分别焊接在输入轴60与螺杆47上,当扭杆56扭转变形时,即可测量输入轴60与螺杆47之间的相对转角,并将测得的转角信号输出给控制器9。
116.控制器9得到传感器59的转角信号后,控制器9根据内部程序驱动电机8转动。
117.电机8输出的助力通过初级减速器总成b、圆柱齿轮减速器总成c、带有行星轮减速机构的转向臂轴总成f带动转向臂轴78转动,最终将电机8的助力通过输出花键输出。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1