前后轴独立驱动电动汽车的能效最优换挡控制方法
11.式中,t
total
为地面提供给汽车的总驱动力矩;i
1m
为所述第一驱动轴的总传动比,当所述两挡变速器挂一挡时,m=1;当所述两挡变速器挂二挡时,m=2;
12.步骤二、所述vcu根据所述两挡变速器当前挡位、汽车当前总驱动力矩t
total
以及当前车速u,查表获得使电机总驱动损失功率最小的转矩分配系数dif
_min
,以及相应的最小电机总损失功率p
loss_min
;
13.步骤三、所述vcu根据当前的行驶条件进行换挡条件的判断:若不满足,则返回执行步骤一;若满足,则执行后续步骤;
14.步骤四、所述vcu根据两挡变速器另一挡位(非当前工作挡位)、汽车当前总驱动力矩t
total
以及当前车速u,查表获得另一挡位下使得电机总驱动损失功率最小的转矩分配系数dif
′
_min
,以及相应的最小电机总损失功率p
′
loss_min
;
15.步骤五、所述vcu比较p
loss_min
与p
′
loss_min
,若p
loss_min
≥(1+a%)p
′
loss_min
,则所述两挡变速器执行换挡操作,且选取另一挡位下使得电机总驱动损失功率最小的转矩分配系数dif
′
_min
作为dif
_min
,即dif
_min
=dif
′
_min
;若p
loss_min
《(1+a%)p
′
loss_min
,则所述两挡变速器保持原挡位不变;
16.步骤六、所述vcu根据转矩分配系数dif
_min
,计算得:所述第一电机的驱动力矩为所述第二电机的驱动力矩为随后所述vcu将计算所得转矩指令发送给所述第一电机与所述第二电机;
17.步骤七、程序结束。
18.作为一种优选,所述前后轴独立驱动电动汽车的能效最优换挡控制方法,应用于前后轴分别由电机独立驱动的电动汽车,且其中某一轴安装有所述两挡变速器,则该轴电机为所述第一电机,另一轴上的电机为所述第二电机;所述第一电机的输出端与所述两挡变速器的输入端连接,所述两挡变速器的输出端经主减速器、差速器、传动轴与车轮连接;所述第二电机的输出端直接经主减速器、差速器、传动轴与车轮连接。
19.作为一种优选,定义转矩分配系数为::
[0020][0021]
另外计算当前驱动工况下电机总驱动损失功率p
loss
:
[0022][0023]
式中,η1为所述第一电机在转矩为t1,转速为n1时的效率,η2为所述第二电机在转矩为t2,转速为n2时的效率,t
drag_1
为所述第一电机倒拖转矩,t
drag_2
为所述第二电机倒拖转矩。
[0024]
作为一种优选,所述步骤二中,根据所述两挡变速器当前挡位、汽车总驱动力矩t
total
以及当前车速u,查表获得在该挡位下使电机总驱动损失功率最小的转矩分配系数
dif
_min
以及相应的最小电机总驱动损失功率p
loss_min
的具体方法为:
[0025]
根据所述第一电机、所述第二电机的map图,基于所述电机总驱动损失功率计算公式,可离线优化求解在不同车速u(此时所述第一电机和第二电机的转速分别为:)与不同汽车总驱动力矩t
total
下,使p
loss
最小的转矩分配系数dif
_min
,以及此时的最小电机总驱动损失功率p
loss_min
;则在汽车实际行驶过程中所述vcu可根据所述两挡变速器当前挡位、汽车总驱动力矩t
total
以及当前车速u,直接调取已经离线计算好的转矩分配系数dif
_min
,以及此时的最小电机总驱动损失功率p
loss_min
。
[0026]
作为一种优选,所述步骤四中,根据所述两挡变速器非当前工作挡位、汽车总驱动力矩t
total
以及当前车速u,查表获得在该未挂挡挡位下使电机总驱动损失功率最小的转矩分配系数dif
′
_min
以及相应的最小电机总驱动损失功率p
′
loss_min
的具体方法为:
[0027]
根据所述第一电机、所述第二电机的map图,基于所述电机总驱动损失功率计算公式,可离线优化求解在不同车速u(此时所述第一电机和第二电机的转速分别为:)与不同汽车总驱动力矩t
total
下,使p
′
loss
最小的转矩分配系数dif
′
_min
,以及此时的最小电机总驱动损失功率p
′
loss_min
;则在汽车实际行驶过程中所述vcu可根据所述两挡变速器未挂挡挡位、汽车总驱动力矩t
total
以及当前车速u,直接调取已经离线计算好的转矩分配系数dif
′
_min
,以及此时的最小电机驱动总损失功率p
′
loss_min
。
[0028]
作为一种优选,所述步骤三中,根据当前的行驶条件进行换挡条件的判断是指,在进行换挡前应判断当前工况下换挡是否满足整车安全性或舒适性要求,以及应判断当前工况下是否需要优先满足整车动力性要求;若判断结果为:当前工况下换挡满足整车安全性或舒适性要求,且当前工况下不需要优先满足整车动力性要求,则满足换挡条件,否则不满足换挡条件。
[0029]
作为一种优选,所述步骤五中,所述公式p
loss_min
≥(1+a%)p
′
loss_min
与p
loss_min
《(1+a%)p
′
loss_min
中的a的取值范围为0~1,具体取值可根据实际需求确定,其设置的目的是为了避免所述两挡变速器在某些工况下进行频繁的换挡。
[0030]
本发明的有益效果是:
[0031]
1.本发明所述前后轴独立驱动电动汽车的能效最优换挡控制方法,相较于传统的电动汽车两挡变速器或前后轴独立驱动技术,提出了一种将电动汽车两挡变速器与前后轴独立驱动技术结合起来,进一步提高汽车总驱动效率的方法。即在两挡变速器的任意档位下,通过前后轴独立驱动电机的转矩分配,实现该挡位下的总驱动效率最高化;进一步,通过比较在当前工况下,两个挡位的电机总驱动损失功率,决定是否进行换挡(两档变速器切换为电机总驱动损失功率较小的挡位)。
[0032]
2.本发明所述前后轴独立驱动电动汽车的能效最优换挡控制方法,相较于传统电动汽车前后轴四驱技术,可通过前后轴独立驱动电机的转矩分配,实现前后轴电机工作区间的优化,使得电机尽可能工作在高效区间,提高整车的经济性。
[0033]
3.本发明所述基于前后轴独立驱动的无动力中断换挡控制方法,基于已有的两挡变速器与前后轴独立驱动技术,不需额外增加相关的辅助装置,商业化应用成本低。
附图说明
[0034]
图1为本发明所述的前后轴独立驱动电动汽车的能效最优换挡控制方法电动汽车驱动系统原理图。
[0035]
图2为本发明所述的前后轴独立驱动电动汽车的能效最优换挡控制方法的两挡变速器结构简图。
[0036]
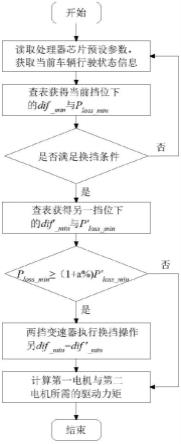
图3为本发明所述的前后轴独立驱动电动汽车的能效最优换挡控制方法的控制流程图。
[0037]
图4为本发明所述的前后轴独立驱动电动汽车的能效最优换挡控制方法的换挡条件判断流程图。
[0038]
图5为本发明所述的前后轴独立驱动电动汽车的能效最优换挡控制方法的第一电机map图实施例。
[0039]
图6为本发明所述的前后轴独立驱动电动汽车的能效最优换挡控制方法的第二电机map图实施例。
具体实施方式
[0040]
下面结合附图对本发明做进一步的详细说明,以令本领域技术人员参照说明书文字能够据以实施。
[0041]
如图1所示,一种基于前后轴独立驱动的无动力中断换挡控制方法所适用的电动汽车包括:第一主减速器110、第一差速器120、两挡变速器200、第一电机(m1)300、整车控制器(vcu)400、第二电机(m2)500、第二主减速器610、第二差速器620、第一电机控制器(mc1)700、第二电机控制器(mc2)800、两挡变速器控制器(tcu)900、左前轮1000、右前轮1100、左后轮1200与右后轮1300。
[0042]
其中第一电机300、两挡变速器200、第一主减速器110与第一差速器120位于第一驱动轴上,第一电机300输出的动力经两挡变速器200、第一主减速器110、第一差速器120后传递至左后轮1200与右后轮1300上;第二电机500、第二主减速器610、第二差速器620位于第二驱动轴上,第二电机500输出的动力经第二主减速器610、第二差速器620后传递至左前轮1000与右前轮1100上。
[0043]
整车控制器400通过信号线与第一电机控制器700、第二电机控制器800以及两挡变速器控制器900信号连接,第一电机控制器700、第二电机控制器800、两挡变速器控制器900分别与第一电机300、第二电机500、两挡变速器200信号连接。
[0044]
如图2所示,所述两挡变速器200,主要包括:输入轴211、一挡主动齿轮212、第一同步环213、花键毂214、接合套215、第二同步环216、二挡主动齿轮217、输出轴221、一挡从动齿轮222、二挡从动齿轮223。
[0045]
输入轴211与第一电机300输出端固定连接,一挡主动齿轮212与二挡主动齿轮217旋转支撑在输入轴211上,一挡主动齿轮212的左侧加工有结合齿圈与外摩擦锥面,二挡主动齿轮217右侧加工有结合齿圈与外摩擦锥面;花键毂214与输入轴211通过花键固定连接;接合套215安装在花键毂214外圈上,并通过花键滑动连接;第一同步环213安装在花键毂214与一挡主动齿轮212之间,其右侧的内摩擦锥面与一挡主动齿轮的左侧的外摩擦锥面相对;第二同步环216安装在花键毂214与二挡主动齿轮217之间,其左侧的内摩擦锥面与二挡
主动齿轮的右侧的外摩擦锥面相对。
[0046]
接合套215,可在换挡机构的作用下向左或向右轴向移动,经第一同步环213或第二同步环216的“同步作用”下,分别与一挡主动齿轮212左侧结合齿圈或二挡主动齿轮217右侧结合齿圈啮合,从而将第一电机300的动力经输入轴211、花键毂214与结合套215,分别传递至一挡主动齿轮212,或二挡主动齿轮217。
[0047]
输出轴221与输入轴211平行布置;一挡从动齿轮222与二挡从动齿轮223固定支撑在输出轴221上,并分别与一挡主动齿轮212、二挡主动齿轮217啮合;传递至一挡主动齿轮212,或二挡主动齿轮217上的动力经一挡主动齿轮212、或二挡主动齿轮217传递至输出轴221上。
[0048]
第一主减速器110包括主减小齿轮111与主减大齿轮112,其中主减小齿轮111固定支撑在输出轴221上,主减大齿轮112固定安装在第一差速器120上,并与主减小齿轮111啮合;传递至输出轴221的动力经主减小齿轮111、主减大齿轮112传递至第一差速器上。
[0049]
如图3所示,本发明所述的基于前后轴独立驱动的无动力中断换挡控制方法应用于图1、图2所示的电动汽车的控制流程具体如下:
[0050]
步骤一、整车控制器vcu400实时读取处理器芯片中存储的第一驱动轴上的两挡变速器200挂一挡时的总传动比i
11
与挂二挡时的总传动比i
12
、第二驱动轴上的减速比i2、轮胎半径rw以及当前行驶条件下的换挡条件,并通过传感器实时获取位于第一驱动轴上的第一电机300的实时转矩t1与实时转速n1、位于第二驱动轴上的第二电机500的实时转矩t2与实时转速n2以及当前车速u,并可求得地面给汽车的总驱动力矩为
[0051]
t
total
=i
1m
t1+i2t2[0052]
式中,t
total
为地面提供给汽车的总驱动力矩;i
1m
为所述第一驱动轴的总传动比,当两挡变速器200挂一挡时,m=1;当所述两挡变速器挂二挡时,m=2;);
[0053]
步骤二、整车控制器400根据两挡变速器200当前挡位、汽车总驱动力矩t
total
以及当前车速u,查表获得使电机总驱动损失功率最小的转矩分配系数dif
_min
,以及相应的最小电机总损失功率p
loss_min
,具体方法为:
[0054]
定义转矩分配系数为:
[0055][0056]
式中,i
1m
为所述第一驱动轴的总传动比,m为两挡变速器200当前挡位,t
total
为地面提供给汽车的总驱动力矩;
[0057]
另外计算当前驱动工况下电机总驱动损失功率p
loss
:
[0058][0059]
式中,η1为所述第一电机300在转矩为t1、转速为n1时的效率,η2为所述第二电机500在转矩为t2、转速为n2时的效率,t
drag_1
为所述第一电机300的倒拖转矩,t
drag_2
为所述第
二电机500的倒拖转矩。
[0060]
如图5、图6所示,根据第一电机300、第二电机500的map图,基于驱动工况下电机总驱动损失功率p
loss
计算公式,可离线优化求解该挡位不同车速u与不同汽车总驱动力矩t
total
下,p
loss
最小的转矩分配系数dif
_min
,以及此时的最小电机总驱动损失功率p
loss_min
。
[0061]
则在实际换挡过程中所述整车控制器可根据两挡变速器200当前挡位、汽车总驱动力矩t
total
以及当前车速u,直接调取已经离线计算好的转矩分配系数dif
_min
,以及此时的最小电机总驱动损失功率p
loss_min
。
[0062]
步骤三、如图4所示,所述整车控制器400根据当前的行驶条件进行换挡条件的判断:若不满足,则返回执行步骤一,若满足,则执行后续步骤。换挡条件的判断是指,在进行换挡前应判断当前工况下换挡是否满足整车安全性或舒适性要求,以及应判断当前工况下是否需要优先满足整车动力性要求。若判断结果为:当前工况下换挡满足整车安全性或舒适性要求,且当前工况下不需要优先满足整车动力性要求,则满足换挡条件;若判断结果为:当前当前工况下换挡不满足整车安全性或舒适性要求,或当前工况下需要优先满足整车动力性要求,则不满足换挡条件。
[0063]
步骤四、整车控制器400根据两挡变速器200另一挡位、汽车总驱动力矩t
total
以及当前车速u,查表获得在该未挂挡挡位下使电机总驱动损失功率最小的转矩分配系数dif
′
_min
以及相应的最小电机总驱动损失功率p
′
loss_min
的具体方法为:
[0064]
定义转矩分配系数为:
[0065][0066]
式中,i
1m
为所述第一驱动轴的总传动比,m为两挡变速器200当前挡位,t
total
为地面提供给汽车的总驱动力矩;
[0067]
另外计算当前驱动工况下电机总驱动损失功率p
loss
:
[0068][0069]
如图5、图6所示,根据第一电机300、第二电机500的map图,基于驱动工况下电机总驱动损失功率p
′
loss
计算公式,可离线优化求解该挡位不同车速u与不同汽车总驱动力矩t
total
下,p
′
loss
最小的转矩分配系数dif
′
_min
,以及此时的最小电机总驱动损失功率p
′
loss_min
。
[0070]
则在实际换挡过程中所述整车控制器可根据两挡变速器200未挂挡的挡位、汽车总驱动力矩t
total
以及当前车速u,直接调取表格中已经离线计算好的转矩分配系数dif
′
_min
,以及此时的最小电机总损失功率p
′
loss_min
。
[0071]
步骤五、整车控制器400比较p
loss_min
与p
′
loss_min
,若p
loss_min
≥(1+a%)p
′
loss_min
,则所述两挡变速器执行换挡操作,且选取另一挡位下使得电机总驱动损失功率最小的转矩分配系数dif
′
_min
作为dif
_min
,即dif
_min
=dif
′
_min
;若p
loss_min
《(1+a%)p
′
loss_min
,则所述两挡变速器保持原挡位不变;公式中的a的取值范围为0~1,具体取值可根据实际需求确定,其设置的目的是为了避免所述两挡变速器200在某些工况下进行频繁的换挡;作为一种优选的实施例,a优选设置为0.3,避免在某些特殊工况下p
loss_min
在p
′
loss_min
数值左右来回波动,造成两挡变速器200的频繁换挡操作,影响乘坐人员的舒适性。
[0072]
具体的换挡操作如下:当两挡变速器200由一挡挂二挡时,接合套215,可在换挡机构的作用下向左轴向移动,经第二同步环216的“同步作用”,与二挡主动齿轮217右侧结合齿圈啮合,从而将第一电机300的动力经输入轴211、花键毂214与结合套215,传递至二挡主动齿轮217。当两挡变速器200由二挡挂一挡时,接合套215,可在换挡机构的作用下向右轴向移动,经第一同步环213的“同步作用”,与一挡主动齿轮212左侧结合齿圈啮合,从而将第一电机300的动力经输入轴211、花键毂214与结合套215,传递至一挡主动齿轮212。
[0073]
步骤六、整车控制器400根据转矩分配系数dif
_min
,计算得:
[0074]
第一电机300的驱动力矩为:
[0075][0076]
第二电机500的驱动力矩为:
[0077][0078]
随后整车控制器400将计算所得转矩指令t1和t2分别发送给第一电机控制器700与第二电机控制器800,从而分别控制第一电机300与第二电机500按照相应的转矩信号输出转矩。
[0079]
步骤七、程序结束。
[0080]
尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域,对熟悉本领域的人员而言,可容易地实现另外地修改,因此在不背离权利要求及等同范围所限定地一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1