一种用于高温压力管道检测机器人的爬行装置的制作方法
1.本实用新型属于管道检测领域,具体为一种用于高温压力管道检测机器人的爬行装置。
背景技术:
2.石化企业中典型炼油过程的主要工艺温度范围在200-550℃之间,在催化裂化和焦化的部分工艺温度达到700-800℃之间,压力管道在长时间在高温环境下服役,容易发生蠕变损伤现象,如果管道存在一些超标缺陷,伴随着蠕变裂纹扩展,容易发生泄漏和爆炸事故。因此,对在役高温压力管道进行安全评估显得尤为重要。然而在高温压力管道的安全评定过程中,需要获取高温压力管道的各个位置的应力参数,但是目前采用的检测方式多为人工检测,检测成本高,且检测效率低。
技术实现要素:
3.本实用新型为了克服现有技术存在的不足,提供了一种用于高温压力管道检测机器人的爬行装置,所述爬行装置可以带动应力检测装置在高温压力管道上行走,从而使得应力检测装置可以自动检测高温压力管道的各个位置上的应力参数,进而为后续对高温压力管道进行安全评定提供数据支撑。
4.本实用新型解决上述技术问题的技术方案是:
5.一种用于高温压力管道检测机器人的爬行装置,包括爬行机构,所述爬行机构两组,分别为第一爬行机构和第二爬行机构;其中,所述爬行机构包括支架、设置在支架上的第一夹持机构、第二夹持机构以及用于驱动所述第一夹持机构沿着高温压力管道的轴线方向运动的直线驱动机构,其中,所述第一夹持机构和所述第二夹持机构均用于实现对所述高温压力管道进行夹持和松开;
6.所述第二爬行机构与所述第一爬行机构之间设置有用于驱动所述第二爬行机构或第一爬行机构绕着所述高温压力管道的轴线方向转动的旋转驱动机构;当所述第一爬行机构中的第一夹持机构和第二夹持机构对所述高温压力管道进行夹持、而所述第二爬行机构中的第一夹持机构和第二夹持机构松开所述高温压力管道时,所述旋转驱动机构用于驱动所述第二爬行机构绕着所述高温压力管道的轴线转动;当所述第二爬行机构中的第一夹持机构和第二夹持机构对所述高温压力管道进行夹持、而所述第一爬行机构中的第一夹持机构和第二夹持机构松开所述高温压力管道时,所述旋转驱动机构用于驱动所述第一爬行机构绕着所述高温压力管道的轴线转动。
7.优选的,所述旋转驱动机构包括设置在所述第二爬行机构的连接座上的支撑架以及设置在支撑架上的旋转电机,其中,所述旋转电机的主轴上设置有旋转齿轮,所述第一爬行机构的支架上设置有弧形导块,所述弧形导块的中间位置设置有与所述旋转齿轮啮合的弧形齿条,所述弧形齿条沿着所述弧形导块的长度方向延伸;所述支撑架上设置有弧形导套,所述弧形导套的弧度与所述弧形导块的弧度一致,且所述弧形导套安装在所述弧形导
块上;所述弧形导套和所述弧形导块能够沿着该弧形导套或弧形导块的延伸方向移动。
8.优选的,所述旋转驱动机构与所述第一爬行机构之间还设置有用于驱动所述第一爬行机构或者所述第二爬行机构和所述旋转驱动机构整体摆动的摆动驱动机构,其中,当所述第一爬行机构中的第一夹持机构和第二夹持机构对所述高温压力管道进行夹持、而所述第二爬行机构中的第一夹持机构和第二夹持机构松开所述高温压力管道时,所述摆动驱动机构用于驱动所述第二爬行机构和所述旋转驱动机构整体摆动;当所述第二爬行机构中的第一夹持机构和第二夹持机构对所述高温压力管道进行夹持、而所述第一爬行机构中的第一夹持机构和第二夹持机构松开所述高温压力管道时,所述摆动驱动机构用于驱动所述第一爬行机构摆动。
9.优选的,所述摆动驱动机构包括摆动座、设置在所述摆动座上的摆动电机,其中,所述弧形导块安装在所述摆动座上,且延伸出该摆动座外;所述摆动电机的主轴与安装在所述第一爬行机构中的支架上的转动座连接,用于带动所述第一爬行机构中的支架转动。
10.优选的,所述摆动驱动机构还包括设置在所述摆动座上的用于对所述高温压力管道进行夹持的第三夹持机构;当所述摆动驱动机构工作时,所述第三夹持机构对所述高温压力管道进行夹持。
11.优选的,所述第一夹持机构、所述第二夹持机构、所述第三夹持机构的结构相同,均包括夹爪以及用于驱动所述夹爪抱紧或松开所述高温压力管道的夹持气缸。
12.优选的,所述直线驱动机构采用电机与丝杆传动机构结合的方式,
13.优选的,所述丝杆传动机构中的丝杆的一侧或两侧设置直线导向机构,用于对所述第一爬行机构中的连接座或第二爬行机构中的连接座进行导向;所述直线导向机构采用滑杆与滑套/滑孔结合的方式。
14.本实用新型与现有技术相比,具有如下优点和有益效果:
15.1、本实用新型的用于高温压力管道检测机器人的爬行装置通过第一爬行机构和第二爬行机构来实现行走,所述第一爬行机构和所述第二爬行机构的爬行方式为:第二夹持机构抱紧高温压力管道,然后第一夹持机构松开高温压力管道,接着所述直线驱动机构驱动所述第一夹持机构向前运动;随后所述第一夹持机构抱紧高温压力管道,所述直线驱动机构复位,使得所述支架以及设置在所述支架上的第二夹持机构向前运动,以此来实现本实用新型的用于高温压力管道检测机器人的爬行装置在高温压力管道上爬行。
16.2、本实用新型的用于高温压力管道检测机器人的爬行装置通过在第一爬行机构和第二爬行机构之间设置旋转驱动机构,当所述第一爬行机构中的第一夹持机构和第二夹持机构对所述高温压力管道进行夹持、而所述第二爬行机构中的第一夹持机构和第二夹持机构松开所述高温压力管道时,所述旋转驱动机构用于驱动所述第二爬行机构绕着所述高温压力管道的轴线转动;当所述第二爬行机构中的第一夹持机构和第二夹持机构对所述高温压力管道进行夹持、而所述第一爬行机构中的第一夹持机构和第二夹持机构松开所述高温压力管道时,所述旋转驱动机构用于驱动所述第一爬行机构绕着所述高温压力管道的轴线转动。通过上述方式,可以带动与所述第一爬行机构或所述第二爬行机构连接的应力检测装置对高温压力管道的周向位置(即高温压力管道的外侧面)进行应力检测。
附图说明
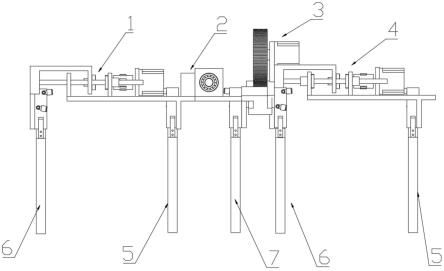
17.图1为本实用新型的用于高温压力管道检测机器人的爬行装置的主视图。
18.图2和图3为本实用新型的用于高温压力管道检测机器人的爬行装置的两个不同视角的立体结构示意图。
19.图4和图5为所述摆动驱动机构和所述旋转驱动机构的两个不同视角的立体结构示意图。
具体实施方式
20.下面结合实施例及附图对本实用新型作进一步详细的描述,但本实用新型的实施方式不限于此。
21.参见图1-图5,本实用新型的用于高温压力管道检测机器人的爬行装置包括爬行机构,所述爬行机构两组,分别为第一爬行机构1和第二爬行机构4,其中,应力检测装置与所述第一爬行机构1或所述第二爬行机构4连接,所述第一爬行机构1与所述第二爬行机构4连接,当本实用新型的爬行装置需要在高温压力管道上行走上,可以所述第一爬行机构1或/和所述第二爬行机构4单独工作;其中,
22.所述爬行机构包括支架8、设置在支架8上的第一夹持机构5、第二夹持机构6以及用于驱动所述第一夹持机构5沿着高温压力管道的轴线方向运动的直线驱动机构,其中,所述第一夹持机构5和所述第二夹持机构6均用于实现对所述高温压力管道进行夹持和松开;
23.其中,所述爬行机构的爬行方式为:
24.第二夹持机构6抱紧高温压力管道,然后第一夹持机构5松开高温压力管道,接着所述直线驱动机构驱动所述第一夹持机构5向前运动;随后所述第一夹持机构5抱紧高温压力管道,所述直线驱动机构复位,使得所述支架8以及设置在所述支架8上的第二夹持机构6向前运动,以此来实现本实用新型的用于高温压力管道检测机器人的爬行装置在高温压力管道上爬行。
25.参见图1-图5,所述第二爬行机构4与所述第一爬行机构1之间设置有用于驱动所述第二爬行机构4或第一爬行机构1绕着所述高温压力管道的轴线方向转动的旋转驱动机构3;当所述第一爬行机构1中的第一夹持机构5和第二夹持机构6对所述高温压力管道进行夹持、而所述第二爬行机构4中的第一夹持机构5和第二夹持机构6松开所述高温压力管道时,所述旋转驱动机构3用于驱动所述第二爬行机构4绕着所述高温压力管道的轴线转动;当所述第二爬行机构4中的第一夹持机构5和第二夹持机构6对所述高温压力管道进行夹持、而所述第一爬行机构1中的第一夹持机构5和第二夹持机构6松开所述高温压力管道时,所述旋转驱动机构3用于驱动所述第一爬行机构1绕着所述高温压力管道的轴线转动;
26.其中,所述旋转驱动机构3包括设置在所述第二爬行机构4的连接座上的支撑架以及设置在支撑架上的旋转电机301,其中,所述旋转电机301的主轴上设置有旋转齿轮302,所述第一爬行机构1的支架8上设置有弧形导块303,所述弧形导块303的中间位置设置有与所述旋转齿轮302啮合的弧形齿条,所述弧形齿条沿着所述弧形导块303的长度方向延伸;所述支撑架上设置有弧形导套304,所述弧形导套304的弧度与所述弧形导块303的弧度一致,且所述弧形导套304安装在所述弧形导块303上;所述弧形导套304和所述弧形导块303能够沿着该弧形导套304或弧形导块303的延伸方向移动。
27.通过上述设置,其目的在于:
28.(1)、当需要对高温压力管道的圆周面进行应力检测时,所述第二爬行机构4中的第一夹持机构5和第二夹持机构6抱紧高温压力管道,接着所述第一爬行机构1中的第一夹持机构5和第二夹持机构6松开高温压力管道。随后所述旋转电机301带动所述旋转齿轮302转动,从而带动所述弧形导块303在所述弧形导套304内沿着该弧形导套304的弧线运动运动,使得所述第一夹持机构5及与其连接的应力检测装置绕着高温压力管道的轴线转动,例如从高温压力管道的上侧面转到下侧面;使得所述应力检测装置可以实现对高温压力管道的周向进行应力检测。
29.(2)、由于“当所述第一爬行机构1中的第一夹持机构5和第二夹持机构6对所述高温压力管道进行夹持、而所述第二爬行机构4中的第一夹持机构5和第二夹持机构6松开所述高温压力管道时,所述旋转驱动机构3用于驱动所述第二爬行机构4绕着所述高温压力管道的轴线转动;当所述第二爬行机构4中的第一夹持机构5和第二夹持机构6对所述高温压力管道进行夹持、而所述第一爬行机构1中的第一夹持机构5和第二夹持机构6松开所述高温压力管道时,所述旋转驱动机构3用于驱动所述第一爬行机构1及应力检测装置绕着所述高温压力管道的轴线转动。”,因此,也可以通过上述方式来使得所述第一爬行机构1和所述第二爬行机构4单独转动,以此来避让障碍物。
30.参见图1-图5,所述旋转驱动机构3与所述第一爬行机构1之间还设置有用于驱动所述第一爬行机构1或者所述第二爬行机构4和所述旋转驱动机构3整体摆动的摆动驱动机构2,其中,当所述第一爬行机构1中的第一夹持机构5和第二夹持机构6对所述高温压力管道进行夹持、而所述第二爬行机构4中的第一夹持机构5和第二夹持机构6松开所述高温压力管道时,所述摆动驱动机构2用于驱动所述第二爬行机构4和所述旋转驱动机构3整体摆动;当所述第二爬行机构4中的第一夹持机构5和第二夹持机构6对所述高温压力管道进行夹持、而所述第一爬行机构1中的第一夹持机构5和第二夹持机构6松开所述高温压力管道时,所述摆动驱动机构2用于驱动所述第一爬行机构1摆动;
31.其中,所述摆动驱动机构2包括摆动座、设置在所述摆动座上的摆动电机201,其中,所述弧形导块303安装在所述摆动座上,且延伸出该摆动座;所述摆动电机201的主轴与安装在所述第一爬行机构1中的支架8上的转动座202连接,用于带动所述第一爬行机构1中的支架8转动,以此来带动所述第一爬行机构1和所述应力检测装置摆动。
32.通过上述设置,其目的在于;
33.通过设置所述摆动驱动机构2,使得所述第一爬行机构1和所述应力检测装置摆动,或者所述第二爬行机构4和所述旋转驱动机构3摆动;当爬行装置在所述高温压力管道中运动到非水平段时,例如90度的垂直段时,所述第二爬行机构4中的第一夹持机构5和第二夹持机构6可以抱紧所述高温压力管道。接着所述第一爬行机构1中的第一夹持机构5和第二夹持机构6松开所述高温压力管道,然后所述摆动电机201带动所述第一爬行机构1中的支架8转动,以此来带动所述第一爬行机构1和所述应力检测装置摆动,使得所述第一爬行机构1与所述第二爬行机构4呈90度夹角,然后爬行装置中的第二爬行机构4带动整体向前运动,使得所述第一爬行机构1中的第一夹持机构5和第二夹持机构6再次抱紧所述高温压力管道的垂直段。接着,所述第二爬行机构4中的第一夹持机构5和第二夹持机构6松开所述高温压力管道,所述爬行装置中的第一爬行机构1负责带动本实用新型的爬行装置整体
移动,待上升到足够的高度后,所述第一爬行机构1中的第一夹持机构5和第二夹持机构6再次抱紧高温压力管道,所述摆动电机201转动,从而使得所述第二爬行机构4由水平状态转为竖直状态,该第二爬行机构4中的第一夹持机构5和第二夹持机构6再次抱紧高温压力管道,最后,所述第一爬行机构1和第二爬行机构4再次爬行,从而实现爬行装置从高温压力管道的水平段爬上竖直段,以此来适用不同角度的管道。同时配合所述旋转驱动机构3,从而实现对不同角度的管道的不同位置进行应力检测。
34.参见图1-图5,所述摆动驱动机构2还包括设置在所述摆动座上的用于对所述高温压力管道进行夹持的第三夹持机构7;当所述摆动驱动机构2工作时,所述第三夹持机构7对所述高温压力管道进行夹持。通过上述设置,即使所述第一爬行机构1或所述第二爬行机构4中的第一夹持机构5和第二夹持机构6未抱紧高温压力管道,所述摆动驱动机构2也可以驱动所述第二爬行机构4或所述第一爬行机构1摆动。另外,通过设置所述第三夹持机构7,也可以增强支撑力或抱紧力。
35.参见图1-图5,所述第一夹持机构5、所述第二夹持机构6、所述第三夹持机构7的结构相同,均包括夹爪12以及用于驱动所述夹爪12抱紧或松开所述高温压力管道的夹持气缸13;所述直线驱动机构采用电机9与丝杆传动机构10结合的方式,且在所述丝杆传动机构10中的丝杆的一侧或两侧设置有直线导向机构,所述直线导向机构采用滑杆与滑套/滑孔结合的方式,用于对连接座11进行直线导向,保证其运动精度。
36.上述为本实用新型较佳的实施方式,但本实用新型的实施方式并不受上述内容的限制,其他的任何未背离本实用新型的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1