一种根据负载变化自动调整的张紧方法以及张紧系统与流程
本发明涉及传动设备,尤其涉及一种根据负载变化自动调整的张紧方法以及张紧系统。
背景技术:
1、现有皮带张紧大多为固定张紧、弹性张紧和恒张力张紧,以上几种张紧方式对皮带施加的张紧力均为定值,理论上皮带拉力是随着负载的变化而变化的,从而施加在皮带上的张紧力也应该实时变化,目前恒定张力的张紧装置存在设定张紧力值过小或过大的问题,从而导致皮带打滑传递功率不足、早期磨损、过度磨损以及断裂故障。
技术实现思路
1、本发明所要解决的技术问题是针对现有技术的不足,提供一种根据负载变化自动调整的张紧方法以及张紧系统。
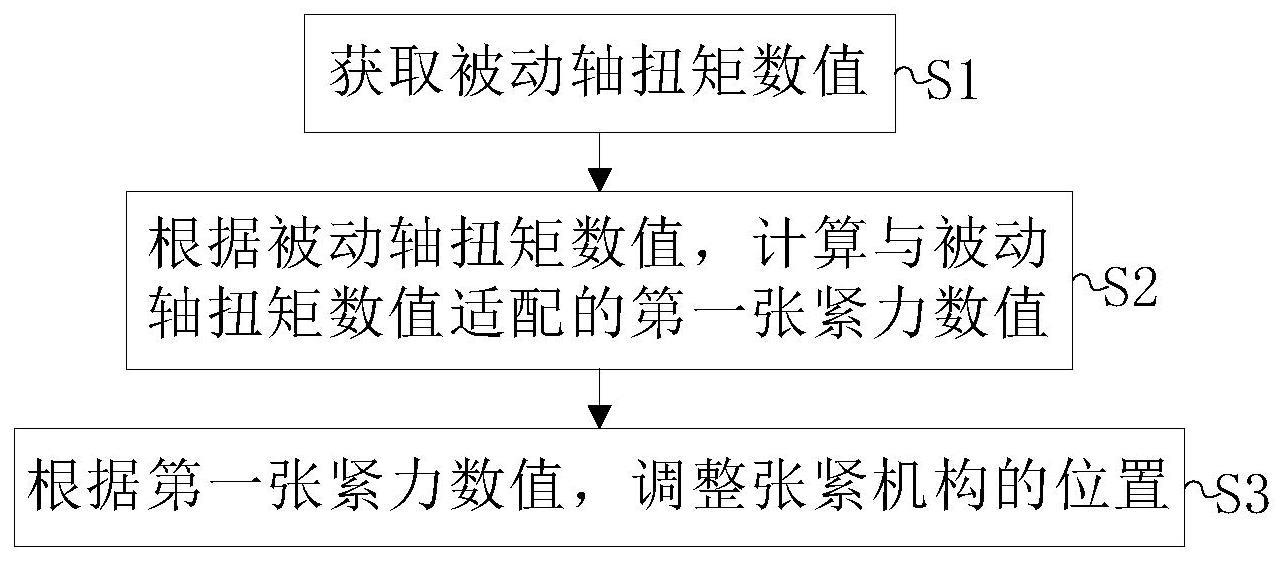
2、本发明解决上述技术问题的技术方案如下:一种根据负载变化自动调整的张紧方法,包括:
3、s1、获取被动轴扭矩数值;
4、s2、根据所述被动轴扭矩数值,计算与所述被动轴扭矩数值适配的第一张紧力数值;
5、s3、根据所述第一张紧力数值,调整张紧机构的位置。
6、采用本发明技术方案的有益效果是:通过检测被动轴扭矩,传输负载信号给控制器,由控制器输出所需的压力控制以及调整张紧机构,使得传动部件的拉力随着负载的变化而变化,从而施加在传动部件上的张紧力也实时变化,避免张紧力值过小或过大的问题,防止传动部件打滑,防止传递功率不足、早期磨损、过度磨损以及断裂故障的情况发生。
7、进一步地,步骤2包括:
8、s21、判断所述被动轴扭矩数值是否发生变化;
9、当所述被动轴扭矩数值发生变化时,获取被动轴扭矩数值变化时间以及预设时间;
10、s22、判断所述被动轴扭矩数值变化时间是否小于所述预设时间;
11、当所述被动轴扭矩数值变化时间大于或等于所述预设时间时,根据所述被动轴扭矩数值,计算与所述被动轴扭矩数值适配的第一张紧力数值。
12、采用上述进一步技术方案的有益效果是:瞬时启动或堵塞导致的负载变化,时间小于预设时间时,控制器输出张力信号不发生变化,充分考虑启动以及偶发负载波动的情形,提高稳定性以及可靠性。时间大于或等于预设时间时,控制器根据最终负载变化及时匹配与最终负载数值适配的张紧力数值,根据张紧力数值调整张紧机构的位置,提高张紧及时性以及精准度。
13、进一步地,步骤s22包括:当所述被动轴扭矩数值变化时间小于所述预设时间时,返回步骤s1。
14、采用上述进一步技术方案的有益效果是:瞬时启动或堵塞导致的负载变化,时间小于预设时间时,控制器输出张力信号不发生变化,充分考虑启动以及偶发负载波动的情形,提高稳定性以及可靠性。
15、进一步地,所述预设时间为2秒。
16、采用上述进一步技术方案的有益效果是:瞬时启动或堵塞导致的负载变化,时间小于预设时间时,控制器输出张力信号不发生变化,充分考虑启动以及偶发负载波动的情形,提高稳定性以及可靠性。
17、进一步地,步骤s3包括:
18、s31、获取主动轴转速、被动轴转速、预设打滑率以及张紧机构的实际位置;
19、s32、根据所述主动轴转速以及所述被动轴转速计算实际打滑率;
20、s33、判断所述实际打滑率是否大于或等于所述预设打滑率;
21、当所述实际打滑率小于所述预设打滑率时,根据所述第一张紧力数值,调整张紧机构的位置。
22、采用上述进一步技术方案的有益效果是:主动轴转速传感器以及被动轴转速传感器分别检测主动轴转速以及被动轴转速,当打滑率≥5%时,控制器根据张紧机构中的张紧轮位置(通过张紧轮位置传感器检测)和负载信号自动调整压力到设定值。充分考虑张紧机构满足被动轴负载时存在的传动部件打滑情形,根据打滑率情况精准选择继续第一张紧力数值工作,还是在采用能够克服打滑现象的第二张紧力数值工作,提高稳定性以及可靠性。
23、进一步地,步骤s33包括:当所述实际打滑率大于或等于所述预设打滑率时,根据第一张紧力数值以及所述张紧机构的实际位置,计算第二张紧力数值;
24、根据所述第二张紧力数值,调整张紧机构的位置。
25、采用上述进一步技术方案的有益效果是:主动轴转速传感器以及被动轴转速传感器分别检测主动轴转速以及被动轴转速,当打滑率≥5%时,控制器根据张紧机构中的张紧轮位置(通过张紧轮位置传感器检测)和负载信号自动调整压力到设定值。充分考虑张紧机构满足被动轴负载时存在的传动部件打滑情形,根据打滑率情况精准选择继续第一张紧力数值工作,还是在采用能够克服打滑现象的第二张紧力数值工作,提高稳定性以及可靠性。
26、此外,本发明还提供了一种根据负载变化自动调整的张紧系统,包括:张力控制器、主动轴、被动轴、传动部件、负载传感器、电动推杆以及张紧机构,所述主动轴通过所述传动部件与所述被动轴连接,所述电动推杆与所述张紧机构连接,所述张紧机构与所述传动部件抵接,所述负载传感器安装在所述被动轴上,所述负载传感器以及所述电动推杆均与所述张力控制器连接;
27、所述负载传感,用于获取被动轴扭矩数值;
28、所述张力控制器,用于根据所述被动轴扭矩数值,计算与所述被动轴扭矩数值适配的第一张紧力数值;
29、所述张力控制器,还用于根据所述第一张紧力数值,调整张紧机构的位置。
30、采用本发明技术方案的有益效果是:通过检测被动轴扭矩,传输负载信号给控制器,由控制器输出所需的压力控制以及调整张紧机构,使得传动部件的拉力随着负载的变化而变化,从而施加在传动部件上的张紧力也实时变化,避免张紧力值过小或过大的问题,防止传动部件打滑,防止传递功率不足、早期磨损、过度磨损以及断裂故障的情况发生。
31、进一步地,所述张力控制器,还用于判断所述被动轴扭矩数值是否发生变化;
32、所述张力控制器,还用于当所述被动轴扭矩数值发生变化时,获取被动轴扭矩数值变化时间以及预设时间;
33、所述张力控制器,还用于判断所述被动轴扭矩数值变化时间是否小于所述预设时间;
34、所述张力控制器,还用于当所述被动轴扭矩数值变化时间大于或等于所述预设时间时,根据所述被动轴扭矩数值,计算与所述被动轴扭矩数值适配的第一张紧力数值。
35、采用上述进一步技术方案的有益效果是:瞬时启动或堵塞导致的负载变化,时间小于预设时间时,控制器输出张力信号不发生变化,充分考虑启动以及偶发负载波动的情形,提高稳定性以及可靠性。时间大于或等于预设时间时,控制器根据最终负载变化及时匹配与最终负载数值适配的张紧力数值,根据张紧力数值调整张紧机构的位置,提高张紧及时性以及精准度。
36、进一步地,所述主动轴上设有主动轴转速传感器,所述被动轴上设有被动轴转速传感器,所述张紧机构上设有张紧轮位置传感器,所述主动轴转速传感器、所述被动轴转速传感器以及所述张紧轮位置传感器均与所述张力控制器连接;
37、所述主动轴转速传感器,用于获取主动轴转速;
38、所述被动轴转速传感器,用于获取被动轴转速;
39、所述张紧轮位置传感器,用于获取张紧机构的实际位置;
40、所述张力控制器,还用于根据所述主动轴转速以及所述被动轴转速计算实际打滑率;
41、所述张力控制器,还用于判断所述实际打滑率是否大于或等于所述预设打滑率;
42、当所述实际打滑率小于所述预设打滑率时,根据所述第一张紧力数值,调整张紧机构的位置。
43、采用上述进一步技术方案的有益效果是:主动轴转速传感器以及被动轴转速传感器分别检测主动轴转速以及被动轴转速,当打滑率≥5%时,控制器根据张紧机构中的张紧轮位置(通过张紧轮位置传感器检测)和负载信号自动调整压力到设定值。充分考虑张紧机构满足被动轴负载时存在的传动部件打滑情形,根据打滑率情况精准选择继续第一张紧力数值工作,还是在采用能够克服打滑现象的第二张紧力数值工作,提高稳定性以及可靠性。
44、进一步地,所述张紧机构上设有拉力传感器,所述传动部件为皮带或者钢带,所述电动推杆上设有弹簧,所述弹簧的一端与所述电动推杆抵接,所述弹簧的另一端与所述张紧机构抵接,所述主动轴上设有主动轮,所述被动轴上设有被动轮,所述传动部件的一端套在所述主动轮上,所述传动部件的另一端套在所述被动轮上。
45、采用上述进一步技术方案的有益效果是:拉力传感器的设置,用于获取张紧机构的实际张紧力,便于控制器根据实际情况以及张紧机构的实际位置精准调整张紧机构。弹簧的设置,便于张紧机构回位。
46、本发明附加的方面的优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!