一种基于四面体型轮系的管道检测装置
本发明涉及管道检测装置,尤其涉及一种基于四面体型轮系的管道检测装置。
背景技术:
1、管道在工业、基础设施建设等方面发挥着巨大作用,然而对其裂纹、形变等性能指标的检测却并非易事。目前,已经出现了不同形式的管道检测机器人,针对不同工况下的管道进行工作。其类型包括四轮式、三履带式、多足式等等,结构和控制系统较为复杂,体积和重量很难精简。在管道承载能力较小、电磁环境复杂等等工作条件有限的情况下,此类设备并不能很好地完成预期任务。此外,多组轮系的设计,可能让设备的约束出现冗余,一部分轮可能无法发挥驱动或支撑的作用,造成资源浪费。
2、针对上述问题,设计一种结构简单、控制方便、体积轻便的管道检测设备。对于二维场景下的管道截面,只需要三个点来确定其半径;而对于三维场景下的管道,则需要沿管道延伸方向额外增加一个点,由此确定了四面体式的轮系分布方式。
技术实现思路
1、本发明目的在于针对现有技术的缺陷,提供一种基于四面体型轮系的管道检测装置,解决管道检测设备结构和控制复杂等问题,降低其制造成本,同时解决轮组过多可能出现的冗余约束问题。
2、为解决上述技术问题,本发明提供技术方案如下:
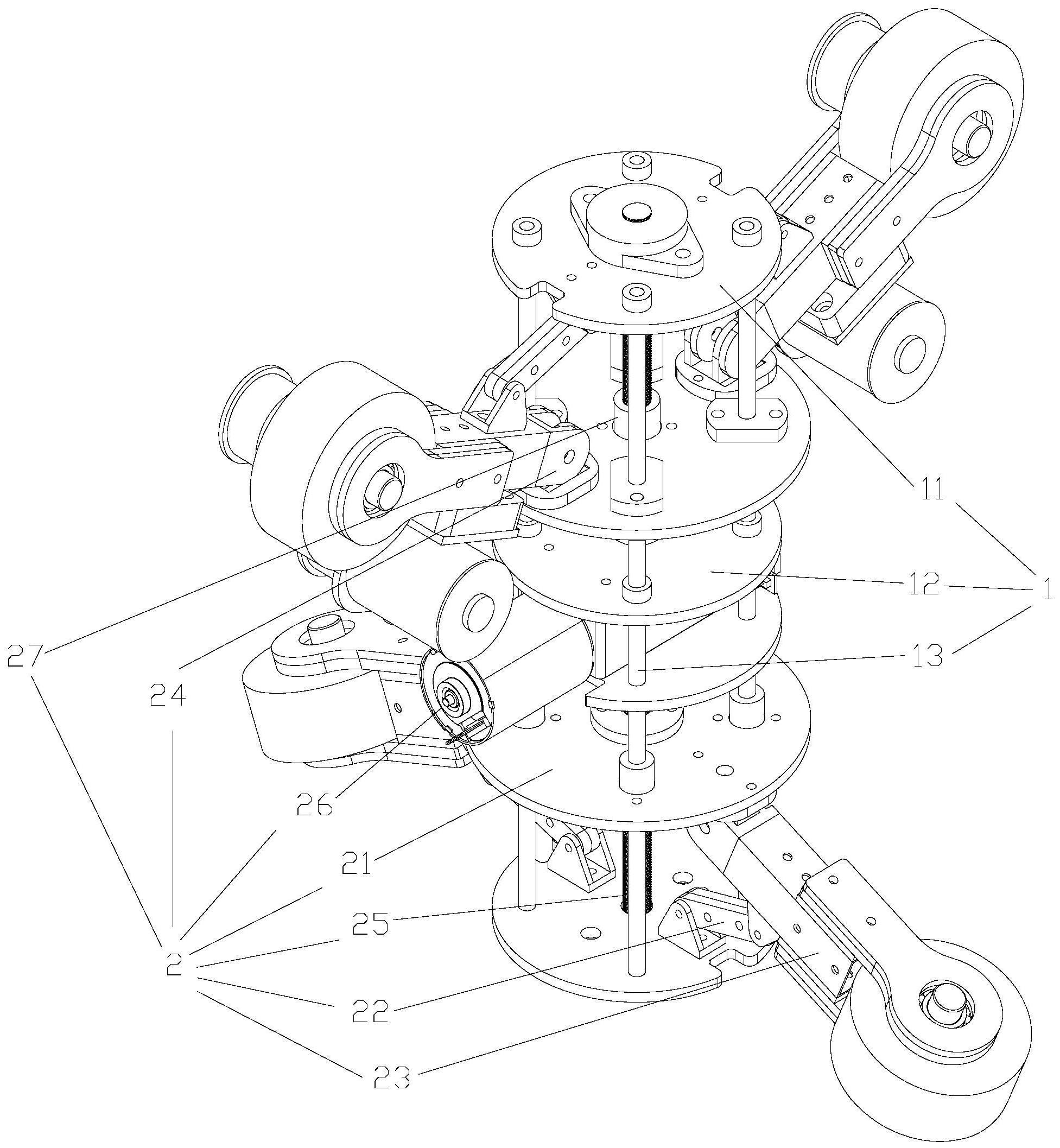
3、一种基于四面体型轮系的管道检测装置,其特征在于:包括支撑机构、变径机构、运动机构;所述支撑机构用于固定和连接变径机构和运动机构,包括光轴和固定连接在光轴两端的末端支撑板;所述变径机构用于改变运动机构的相对位置并进而改变装置所确定管道直径,包括滑动板、拉杆、轮子支撑杆、丝杠、变径驱动电机,所述滑动板滑动连接在所述光轴上,所述轮子支撑杆的一端铰接在滑动板上,所述拉杆的一端铰接在所述末端支撑板上,另一端铰接在轮子支撑杆上,所述丝杠设置在两端的末端支撑板之间并与滑动板螺纹连接,所述变径驱动电机驱动连接丝杠;所述运动机构用于驱动装置整体在管道中移动,包括主动轮装置和从动轮装置,所述主动轮装置和从动轮装置分设在装置两端的轮子支撑杆上。
4、进一步的,所述支撑机构还包括电机支撑板,所述电机支撑板固定连接在所述光轴的中部,所述变径驱动电机固定连接在电机支撑板上。
5、进一步的,所述末端支撑板和电机支撑板均通过光轴固定环固定连接在所述光轴上。
6、进一步的,所述光轴共设置有四根,且呈中心对称分布。
7、进一步的,所述滑动板通过丝杠螺母螺纹连接在所述丝杠上,通过直线轴承连接在所述光轴上。
8、进一步的,位于丝杠同一端的所述轮子支撑杆关于所述丝杠对称布置,且分布在同一平面内,位于丝杠两端的轮子支撑杆的布置平面之间互相垂直,使所述运动机构上的轮系呈四面体型分布。
9、进一步的,所述主动轮装置包括主动轮、第一轴承安装板、轮子驱动电机,所述主动轮通过所述第一轴承安装板连接在所述轮子支撑杆上,所述轮子驱动电机固定连接在轮子支撑杆上并与主动轮驱动连接。
10、进一步的,所述主动轮和轮子驱动电机的电机轴上同轴设置有同步带轮,所述轮子驱动电机通过同步带驱动连接所述同步带轮,从而带动主动轮转动。
11、进一步的,所述从动轮装置包括从动轮、第二轴承安装板,所述从动轮通过所述第二轴承安装板连接在所述轮子支撑杆上。
12、进一步的,还包括电力模块,所述电力模块包括单片机、供电模块、遥控模块,所述供电模块为装置提供电力;所述单片机实现所述变径驱动电机、轮子驱动电机的启停、转向及速度控制;所述遥控模块用于接受遥控指令,实现装置的远程控制,通过配备超声检伤设备,实现装置在管道中的各种工作任务。
13、与现有技术相比,本发明的有益效果是:
14、1.实现车轮数量的最精简。通过设置呈四面体型分布的四个轮子,实现了设备在管道中所受约束的最小化,防止冗余约束的产生,同时确保了设备的稳定性。
15、2.实现了变径原理的简化。通过一个双出轴电机控制两边滑动板的运动,并进而通过曲柄滑块机构控制四个轮子张开的夹角,改变所确定圆管道的直径,适用于不同直径的圆管道。
16、3.实现了多级的变径范围。通过调整从动轮的朝向,可以使设备进入不同的工作状态,以适应更加广泛的变径需求。
技术特征:
1.一种基于四面体型轮系的管道检测装置,其特征在于:包括支撑机构(1)、变径机构(2)、运动机构;所述支撑机构(1)用于固定和连接变径机构(2)和运动机构,包括光轴(13)和固定连接在光轴(13)两端的末端支撑板(11);所述变径机构(2)用于改变运动机构的相对位置并进而改变装置所确定管道直径,包括滑动板(21)、拉杆(22)、轮子支撑杆(23)、丝杠(25)、变径驱动电机(26),所述滑动板(21)滑动连接在所述光轴(13)上,所述轮子支撑杆(23)的一端铰接在滑动板(21)上,所述拉杆(22)的一端铰接在所述末端支撑板(11)上,另一端铰接在轮子支撑杆(23)上,所述丝杠(25)设置在两端的末端支撑板(11)之间并与滑动板(21)螺纹连接,所述变径驱动电机(26)驱动连接丝杠(25);所述运动机构用于驱动装置整体在管道中移动,包括主动轮装置(3)和从动轮装置(4),所述主动轮装置(3)和从动轮装置(4)分设在装置两端的轮子支撑杆(23)上。
2.根据权利要求1所述一种基于四面体型轮系的管道检测装置,其特征在于:所述支撑机构(1)还包括电机支撑板(12),所述电机支撑板(12)固定连接在所述光轴(13)的中部,所述变径驱动电机(26)固定连接在电机支撑板(12)上。
3.根据权利要求2所述一种基于四面体型轮系的管道检测装置,其特征在于:所述末端支撑板(11)和电机支撑板(12)均通过光轴固定环固定连接在所述光轴(13)上。
4.根据权利要求1所述一种基于四面体型轮系的管道检测装置,其特征在于:所述光轴(13)共设置有四根,且呈中心对称分布。
5.根据权利要求1所述一种基于四面体型轮系的管道检测装置,其特征在于:所述滑动板(21)通过丝杠螺母(27)螺纹连接在所述丝杠(25)上,通过直线轴承(28)连接在所述光轴(13)上。
6.根据权利要求1所述一种基于四面体型轮系的管道检测装置,其特征在于:位于丝杠(25)同一端的所述轮子支撑杆(23)关于所述丝杠(25)对称布置,且分布在同一平面内,位于丝杠(25)两端的轮子支撑杆(23)的布置平面之间互相垂直,使所述运动机构上的轮系呈四面体型分布。
7.根据权利要求1所述一种基于四面体型轮系的管道检测装置,其特征在于:所述主动轮装置(3)包括主动轮(32)、第一轴承安装板(34)、轮子驱动电机(33),所述主动轮(32)通过所述第一轴承安装板(34)连接在所述轮子支撑杆(23)上,所述轮子驱动电机(33)固定连接在轮子支撑杆(23)上并与主动轮(32)驱动连接。
8.根据权利要求7所述一种基于四面体型轮系的管道检测装置,其特征在于:所述主动轮(32)和轮子驱动电机(33)的电机轴上同轴设置有同步带轮(36),所述轮子驱动电机(33)通过同步带驱动连接所述同步带轮(36),从而带动主动轮(32)转动。
9.根据权利要求1所述一种基于四面体型轮系的管道检测装置,其特征在于:所述从动轮装置(4)包括从动轮(42)、第二轴承安装板(43),所述从动轮(42)通过所述第二轴承安装板(43)连接在所述轮子支撑杆(23)上。
10.根据权利要求1所述一种基于四面体型轮系的管道检测装置,其特征在于:还包括电力模块,所述电力模块包括单片机(51)、供电模块、遥控模块,所述供电模块为装置提供电力;所述单片机(51)实现所述变径驱动电机(26)、轮子驱动电机(33)的启停、转向及速度控制;所述遥控模块用于接受遥控指令,实现装置的远程控制,通过配备超声检伤设备,实现装置在管道中的各种工作任务。
技术总结
本发明公开了一种基于四面体型轮系的管道检测装置,主要由支撑机构、变径机构、运动机构三部分组成。支撑机构由支撑杆和板材组合而成,起到固定和连接其它机构的作用;变径机构可带动四个轮子发生位置变化,进而改变机构所确定管道的直径;运动机构由两个主动轮、两个从动轮及相关驱动和支撑组件构成。通过使变径机构运作,配合装置的不同工作状态,可以使装置适应不同管道直径下的工况,以达成管道检测的作业需求。解决了管道检测设备结构和控制复杂等问题,降低其制造成本,同时解决轮组过多可能出现的冗余约束问题。
技术研发人员:王斗文,张茜贝,邢行杰,赵古田
受保护的技术使用者:东南大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!