一种用于双电机动力调配的减速箱机构及机器人
本申请涉及机器人,尤其涉及一种用于双电机动力调配的减速箱机构及机器人。
背景技术:
1、减速器在原动机和工作机或执行机构之间起匹配转速和传递转矩的作用,在现代机械中应用极为广泛。随着机器人技术不断发展,作为机器人“三大件”之一的减速器设计日新月异。
2、但现有技术所提出的减速器机构,无法满足电机等动力部件的动力在存在时序差异的执行机构间合理调配的问题。如在足式机器人中,减速器配合电机、控制器组成了机器人的各个“关节”,但目前在人形机器人存在这样几个现象:人形机器人运动过程中,尤其行走过程中,双腿交替而使得摆动腿的动力需求很小,而支撑腿动力需求很大,即肢体间动力需求存在峰谷差异;而同一条腿设计的多个关节并不会在同一个任务中同时使用,即关节之间动力需求也存在峰谷差异。因此通常一个“关节”一套控制器、电机、减速器的方式存在大量的“浪费”,大部分关节在部分时间段内是不需要做功的。
技术实现思路
1、本申请实施例的目的是提供一种用于双电机动力调配的减速箱机构,以至少解决相关技术中存在的无法实现动力在存在时序差异的执行机构间合理调配的问题。
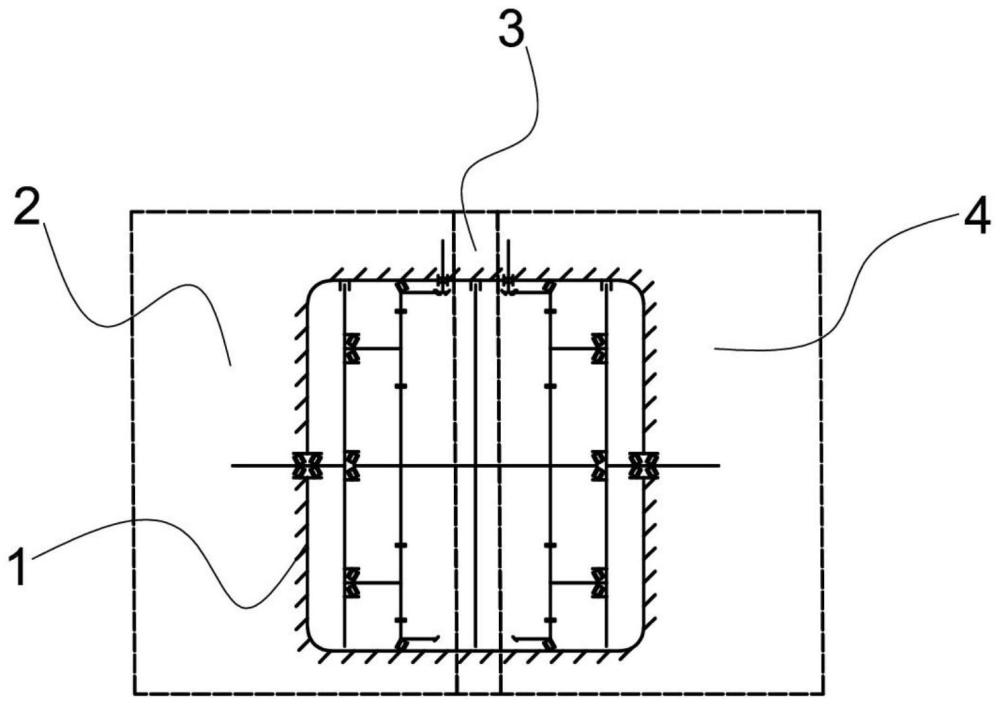
2、根据本申请实施例的第一方面,提供一种用于双电机动力调配的减速箱机构,包括壳体以及安装在所述壳体上的左行星齿轮减速排、调配机构和右行星齿轮减速排,所述调配机构的中心轴分别与所述左行星齿轮减速排的太阳齿轮以及所述右行星齿轮减速排中的右太阳齿轮固定连接。
3、进一步地,所述左行星齿轮减速排包括:左动力输入轴、左锥齿轮、左齿圈、左行星齿轮、左太阳齿轮、左行星架电磁抱刹器、左行星架、左输出轴,所述左动力输入轴伸入所述壳体后与所述左锥齿轮相连,所述左锥齿轮与所述左齿圈相啮合,所述左齿圈支承在所述壳体内,所述左齿圈与所述左行星齿轮相啮合,所述左行星齿轮与所述左太阳齿轮相啮合,所述左行星齿轮和左太阳齿轮的转轴均转动连接在所述左行星架上,所述左行星架固定在所述左输出轴的一端,所述左输出轴的另一端伸出所述壳体,所述左行星架外缘与所述左行星架电磁抱刹器间隙配合。
4、进一步地,所述左齿圈上具有左外锥齿和左内齿,所述左外锥齿与所述锥齿轮外啮合,所述左内齿与所述行星齿轮内啮合。
5、进一步地,所述调配机构包括调配电磁抱刹器、制动轮和中心轴,所述调配电磁抱刹器与所述壳体固定,所述制动轮与所述中心轴固定连接,所述制动轮外缘与所述调配电磁抱刹器间隙配合。
6、进一步地,所述右行星齿轮减速排包括:右动力输入轴、右锥齿轮、右齿圈、右行星齿轮、右太阳齿轮、右行星架电磁抱刹器、右行星架、右输出轴,所述右动力输入轴伸入所述壳体后与所述右锥齿轮相连,所述右锥齿轮与所述右齿圈相啮合,所述右齿圈支承在所述壳体内,所述右齿圈与所述右行星齿轮相啮合,所述右行星齿轮与所述右太阳齿轮相啮合,所述右行星齿轮和右太阳齿轮的转轴均转动连接在所述右行星架上,所述右行星架固定在所述右输出轴的一端,所述右输出轴的另一端伸出所述壳体,所述右行星架外缘与所述右行星架电磁抱刹器间隙配合。
7、进一步地,所述右齿圈上具有右外锥齿和右内齿,所述右外锥齿与所述锥齿轮外啮合,所述右内齿与所述行星齿轮内啮合。
8、根据本申请实施例的第二方面,提供一种机器人,包括第一方面所述的一种用于双电机动力调配的减速箱机构。
9、本申请的实施例提供的技术方案可以包括以下有益效果:
10、1、本申请提供的双电机动力调配的减速箱机构采用两套可解耦的耦合行星齿轮减速排,以较小体积获得大减速比。
11、2、本申请提供的双电机动力调配的减速箱机构以一套减速箱机构适配两个电机,双输入双输出,有效降低多关节机器人系统的结构复杂度。
12、3、本申请提供的双电机动力调配的减速箱机构可以通过调配机构调整两个输入轴输入功率的流向,实现双输出模式和两种单侧输出模式,实现动力在存在时序差异的执行机构间的合理调配,可以为多关节机器人研发节省更多的设计空间、时间和经济成本。
13、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种用于双电机动力调配的减速箱机构,其特征在于,包括壳体以及安装在所述壳体上的左行星齿轮减速排、调配机构和右行星齿轮减速排,所述调配机构的中心轴分别与所述左行星齿轮减速排的太阳齿轮以及所述右行星齿轮减速排中的右太阳齿轮固定连接。
2.根据权利要求1所述的一种用于双电机动力调配的减速箱机构,其特征在于,所述左行星齿轮减速排包括:左动力输入轴、左锥齿轮、左齿圈、左行星齿轮、左太阳齿轮、左行星架电磁抱刹器、左行星架、左输出轴,所述左动力输入轴伸入所述壳体后与所述左锥齿轮相连,所述左锥齿轮与所述左齿圈相啮合,所述左齿圈支承在所述壳体内,所述左齿圈与所述左行星齿轮相啮合,所述左行星齿轮与所述左太阳齿轮相啮合,所述左行星齿轮和左太阳齿轮的转轴均转动连接在所述左行星架上,所述左行星架固定在所述左输出轴的一端,所述左输出轴的另一端伸出所述壳体,所述左行星架外缘与所述左行星架电磁抱刹器间隙配合。
3.根据权利要求2所述的一种用于双电机动力调配的减速箱机构,其特征在于,所述左锥齿轮和左齿圈的轴向相垂直。
4.根据权利要求2所述的一种用于双电机动力调配的减速箱机构,其特征在于,所述左齿圈上具有左外锥齿和左内齿,所述左外锥齿与所述锥齿轮外啮合,所述左内齿与所述行星齿轮内啮合。
5.根据权利要求1所述的一种用于双电机动力调配的减速箱机构,其特征在于,所述调配机构包括调配电磁抱刹器、制动轮和中心轴,所述调配电磁抱刹器与所述壳体固定,所述制动轮与所述中心轴固定连接,所述制动轮外缘与所述调配电磁抱刹器间隙配合。
6.根据权利要求1所述的一种用于双电机动力调配的减速箱机构,其特征在于,所述右行星齿轮减速排包括:右动力输入轴、右锥齿轮、右齿圈、右行星齿轮、右太阳齿轮、右行星架电磁抱刹器、右行星架、右输出轴,所述右动力输入轴伸入所述壳体后与所述右锥齿轮相连,所述右锥齿轮与所述右齿圈相啮合,所述右齿圈支承在所述壳体内,所述右齿圈与所述右行星齿轮相啮合,所述右行星齿轮与所述右太阳齿轮相啮合,所述右行星齿轮和右太阳齿轮的转轴均转动连接在所述右行星架上,所述右行星架固定在所述右输出轴的一端,所述右输出轴的另一端伸出所述壳体,所述右行星架外缘与所述右行星架电磁抱刹器间隙配合。
7.根据权利要求5所述的一种用于双电机动力调配的减速箱机构,其特征在于,所述右锥齿轮和右齿圈的轴向相垂直。
8.根据权利要求5所述的一种用于双电机动力调配的减速箱机构,其特征在于,所述右齿圈上具有右外锥齿和右内齿,所述右外锥齿与所述锥齿轮外啮合,所述右内齿与所述行星齿轮内啮合。
9.一种机器人,其特征在于,包括权利要求1-8任一项所述的一种用于双电机动力调配的减速箱机构。
技术总结
本申请公开了一种用于双电机动力调配的减速箱机构,包括壳体以及安装在所述壳体上的左行星齿轮减速排、调配机构和右行星齿轮减速排,所述调配机构的中心轴分别与所述左行星齿轮减速排的太阳齿轮以及所述右行星齿轮减速排中的右太阳齿轮固定连接。还公开一种机器人,包括上述的一种用于双电机动力调配的减速箱机构。
技术研发人员:徐业业,朱世强
受保护的技术使用者:浙江大学
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!