车辆控制方法、系统、车辆及存储介质与流程
本发明属于车辆控制,具体而言,涉及一种车辆控制方法、系统、车辆及存储介质。
背景技术:
1、同步器在现代变速器中应用非常广泛,尤其是乘用车变速器,在整车电动化高度发展的今天,同步器仍然在混动专用变速器中广为应用,以其噪音低,振动小等优点颇受广大自动变速器设计工程师喜爱。
2、但齿套倒锥角的设计无法完全兼顾挡位稳定性(防止脱挡)、低摘挡力等要求,较小的倒锥角虽减轻了摘挂挡执行系统的功率要求,但带来了脱挡风险,尤其在颠簸路面或者在大的输入扭矩要求下,车辆很容易出现脱挡的风险。
技术实现思路
1、本发明实施例提供了一种车辆控制方法、系统、车辆及存储介质,以至少解决现有技术中在颠簸路面或者在大的输入扭矩要求下,车辆容易脱挡的技术问题。
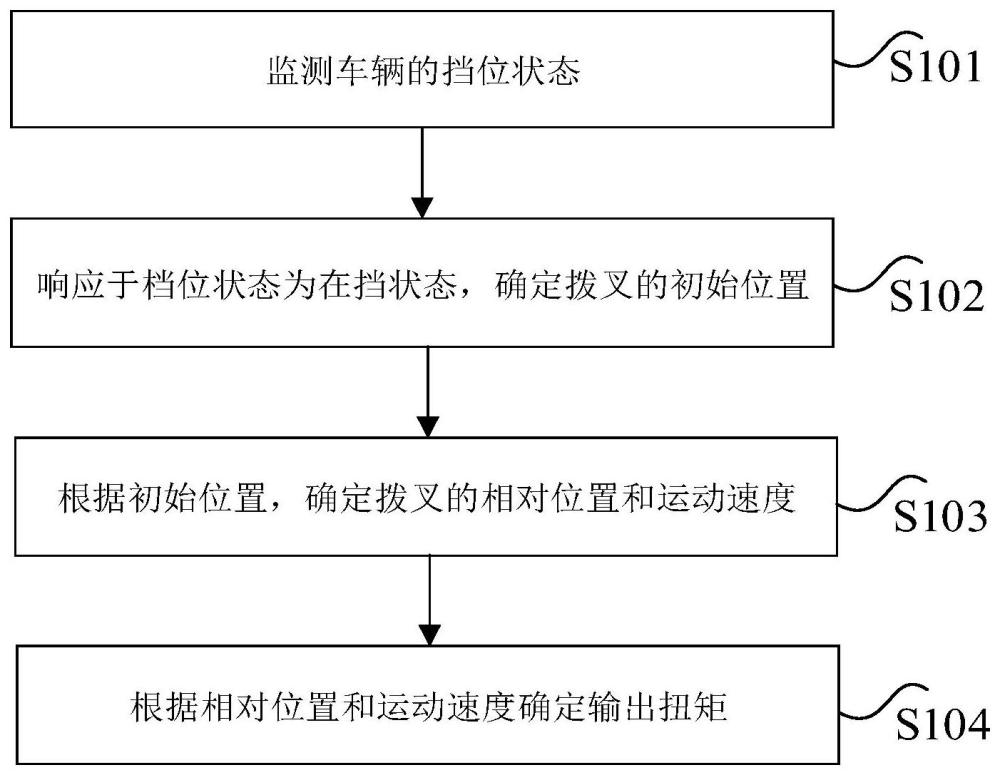
2、根据本发明实施例的第一个方面,提供了一种车辆控制方法,包括:监测车辆的挡位状态,其中,挡位状态包括在挡状态和非在挡状态;响应于挡位状态为在挡状态,确定拨叉的初始位置;根据初始位置,确定拨叉的相对位置和运动速度;根据相对位置和运动速度确定输出扭矩,其中,输出扭矩用于指导挂挡执行系统输出。
3、可选的,根据初始位置,确定拨叉的相对位置包括:获取拨叉的位置得到当前位置;响应于当前位置与初始位置的差值等于挡位进挡,将当前位置确定为相对位置。
4、可选的,车辆控制方法还包括:响应于当前位置与初始位置的差值小于挡位进挡,执行获取拨叉的位置得到当前位置的步骤。
5、可选的,根据初始位置,确定拨叉的运动速度包括:获取拨叉从初始位置运动至相对位置的运动时间;确定初始位置和相对位置之间的运动距离;根据运动时间和运动距离,确定运动速度。
6、可选的,根据相对位置和运动速度确定输出扭矩包括:根据相对位置和运动速度,查询预设扭矩对照表格,确定输出扭矩,其中,预设扭矩对照表格中包括、运动速度与输出扭矩的对照关系。
7、可选的,预设扭矩对照表格通过对实车进行标定得到。
8、可选的,根据相对位置和运动速度确定输出扭矩包括:根据相对位置和运动速度确定初始扭矩;响应于初始扭矩属于预设扭矩范围,确定初始扭矩为输出扭矩。
9、根据本发明实施例的第二方面,还提供一种车辆控制系统,包括:
10、监测模块,用于监测车辆的挡位状态,其中,挡位状态包括在挡状态和非在挡状态;第一确定模块,用于响应于挡位状态为在挡状态,确定拨叉的初始位置;第二确定模块,用于根据初始位置,确定拨叉的相对位置和运动速度;第三确定模块,用于根据相对位置和运动速度确定输出扭矩,其中,输出扭矩用于指导挂挡执行系统输出。
11、可选的,第二确定模块还用于:获取拨叉的位置得到当前位置;响应于当前位置与初始位置的差值等于挡位进挡,将当前位置确定为相对位置。
12、可选的,第二确定模块还用于:响应于当前位置与初始位置的差值小于挡位进挡,执行获取拨叉的位置得到当前位置的步骤。
13、可选的,第二确定模块还用于:获取拨叉从初始位置运动至相对位置的运动时间;确定初始位置和相对位置之间的运动距离;根据运动时间和运动距离,确定运动速度。
14、可选的,第三确定模块还用于:根据相对位置和运动速度,查询预设扭矩对照表格,确定输出扭矩,其中,预设扭矩对照表格中包括、运动速度与输出扭矩的对照关系。
15、可选的,第三确定模块中的预设扭矩对照表格通过对实车进行标定得到。
16、可选的,第三确定模块还用于:根据相对位置和运动速度确定初始扭矩;响应于初始扭矩属于预设扭矩范围,确定初始扭矩为输出扭矩。
17、根据本发明实施例的第三方面,还提供了一种车辆,包括存储器和处理器,存储器中存储有计算机程序,处理器被设置为运行计算机程序以执行上述第一方面任一实施例中所述的车辆控制方法。
18、根据本发明实施例的第四方面,还提供了一种非易失性存储介质,非易失性存储介质中存储有计算机程序,其中,计算机程序被设置为在计算机或处理器上运行时,执行上述第一方面任一实施例中所述的车辆控制方法。
19、在本发明实施例中,首先监测车辆的挡位状态,其中,挡位状态包括在挡状态和非在挡状态;然后响应于挡位状态为在挡状态,确定拨叉的初始位置;然后根据初始位置,确定拨叉的相对位置和运动速度;最后根据相对位置和运动速度确定输出扭矩,其中,输出扭矩用于指导挂挡执行系统输出。本发明通过在拨叉位置变动时,根据拨叉的相对位置和运动速度,确定输出扭矩指导挂挡执行系统的输出,以使拨叉回正,避免拨叉脱挡,进而可以解决现有技术中在颠簸路面或者在大的输入扭矩要求下,车辆容易脱挡的技术问题。
技术特征:
1.一种车辆控制方法,其特征在于,包括:
2.根据权利要求1所述的车辆控制方法,其特征在于,所述根据所述初始位置,确定所述拨叉的相对位置包括:
3.根据权利要求2所述的车辆控制方法,其特征在于,还包括:
4.根据权利要求1所述的车辆控制方法,其特征在于,所述根据所述初始位置,确定所述拨叉的运动速度包括:
5.根据权利要求1所述的车辆控制方法,其特征在于,所述根据所述相对位置和所述运动速度确定输出扭矩包括:
6.根据权利要求5所述的车辆控制方法,其特征在于,所述预设扭矩对照表格通过对实车进行标定得到。
7.根据权利要求1所述的车辆控制方法,其特征在于,所述根据所述相对位置和所述运动速度确定输出扭矩包括:
8.一种车辆控制系统,其特征在于,包括:
9.一种车辆,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行上述权利要求1至7任一项中所述的车辆控制方法。
10.一种非易失性存储介质,其特征在于,所述非易失性存储介质中存储有计算机程序,其中,所述计算机程序被设置为在计算机或处理器上运行时,执行上述权利要求1至7任一项中所述的车辆控制方法。
技术总结
本发明公开了一种车辆控制方法、系统、车辆及存储介质,其中,方法包括:监测车辆的挡位状态,其中,挡位状态包括在挡状态和非在挡状态;响应于挡位状态为在挡状态,确定拨叉的初始位置;根据初始位置,确定拨叉的相对位置和运动速度;根据相对位置和运动速度确定输出扭矩,其中,输出扭矩用于指导挂挡执行系统输出。本发明解决了现有技术中在颠簸路面或者在大的输入扭矩要求下,车辆容易脱挡的技术问题。
技术研发人员:杨俊,梁宏宇,姜彤,赵健涛,刘君祺
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!