摆线减速器及机器人的制作方法
本公开涉及机器人,具体涉及摆线减速器及机器人。
背景技术:
1、在相关技术中,摆线减速器的凸轮带动摆线盘实现摆线运动,并利用摆线盘外圈与针齿的啮合获得相对于凸轮减速的转动,摆线减速器的稳定性和减速比相较于普通减速机构具备明显优势。
2、然而,摆线减速器在加工过程中对啮合齿形及啮合位置的加工精度要求较高,导致摆线盘和针齿的配合结构复杂、加工难度及成本增加。
技术实现思路
1、本公开提供一种摆线减速器及机器人,以解决相关技术问题。
2、本公开的实施例提供一种摆线减速器,包括:
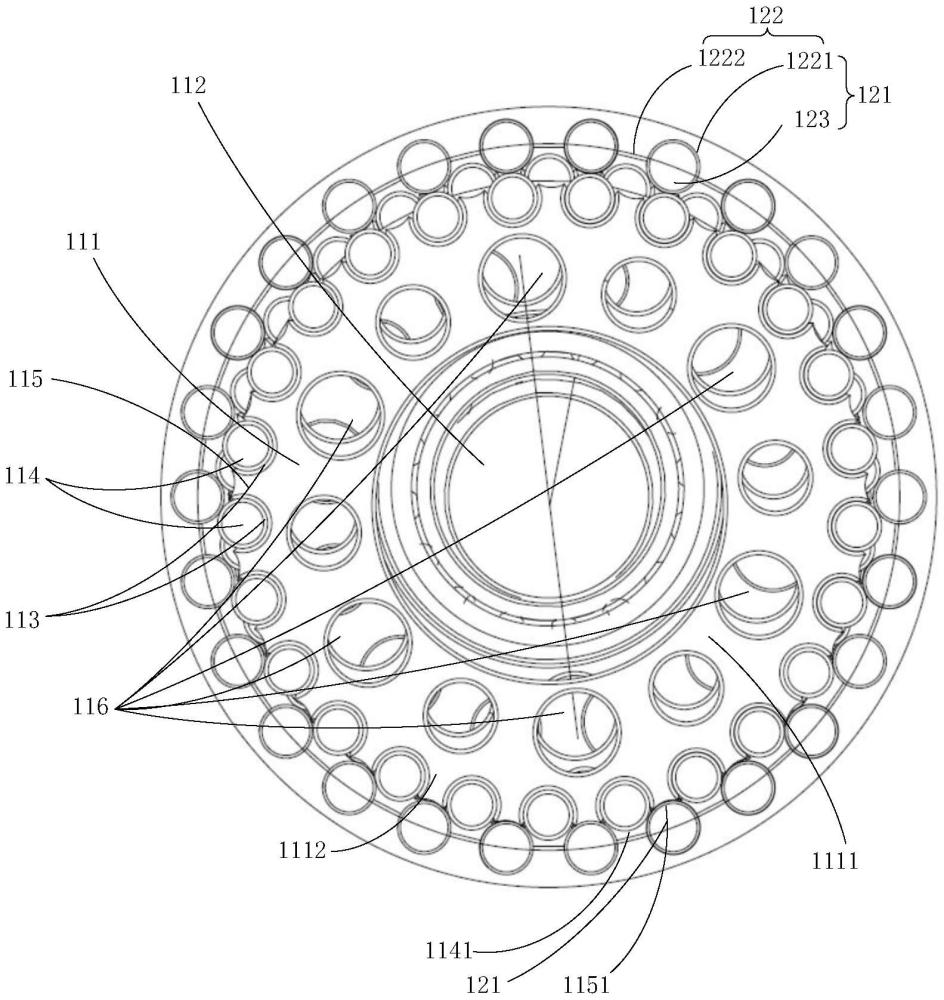
3、摆线盘,包括主体结构、传动连接部、若干限位槽、若干啮合转轴和若干间隔结构;所述主体结构包括边缘区域和设置于所述边缘区域内部的中间区域;所述限位槽设置于所述边缘区域,且相邻所述限位槽通过所述间隔结构分隔开来;所述啮合转轴活动插装于所述限位槽;
4、针齿组件,包括沿周向间隔设置于所述摆线盘外围的若干针齿主体;所述啮合转轴外露于所述限位槽的第一表面与所述间隔结构的弧形侧面形成配合于所述针齿主体的啮合面;
5、传动凸轮,与所述传动连接部相连,以带动所述啮合面与所述针齿主体啮合。
6、可选的,所述弧形侧面的曲率半径等于所述针齿主体的半径。
7、可选的,所述针齿组件包括针齿壳和针齿本体;所述针齿壳包括若干组装筒和连接相邻所述组装筒的连接结构;所述针齿本体插装于所述组装筒,以与所述组装筒形成沿周向间隔设置于所述摆线盘外围的若干所述针齿主体。
8、可选的,所述连接结构包括连接相邻所述组装筒的弧形片状结构,所述弧形片状结构位于同一圆周上。
9、可选的,所述传动连接部包括设置于所述中间区域中心的传动孔,所述传动凸轮的输出端组装于所述传动孔。
10、可选的,所述摆线减速器包括输出结构;所述输出结构包括第一输出轴和至少一个连接销轴;所述摆线盘还设有连接孔;所述连接销轴插装于所述连接孔,且所述连接销轴的直径小于所述连接孔,以使所述第一输出轴形成预设速度的转动。
11、可选的,所述摆线盘设有多个所述连接孔,所述连接孔的圆心分布于所述传动孔外围的同一圆周上。
12、可选的,所述摆线减速器包括第二输出轴;所述针齿组件随所述啮合面与所述针齿主体的啮合过程产生预设速度的转动;所述第二输出轴与所述针齿组件固定连接。
13、可选的,所述针齿主体包括相对设置的第一端和第二端;所述摆线减速器包括至少两个所述摆线盘,至少一个摆线盘形成的啮合面配合于所述第一端,至少一个所述摆线盘形成的啮合面配合于所述第二端。
14、根据本公开的第二方面提供一种机器人,所述机器人包括关节主体和第一方面所述的任一摆线减速器,所述摆线减速器组装于所述关节主体。
15、本公开提供的技术方案至少可以达到以下有益效果:
16、本公开的摆线减速器采用了为摆线盘设置限位槽,并通过活动插装在限位槽的啮合转轴外露于限位槽的部分与间隔结构的弧形侧面形成了配合于针齿主体的啮合面。针齿主体与啮合转轴在啮合过程中发生相对转动,因此有助于降低对啮合面的加工精度要求。且间隔结构的弧形侧面使得啮合面能够与摆线轨迹匹配,还有助于提升摆线减速器的结构可靠性和稳定性。
17、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
技术特征:
1.一种摆线减速器,其特征在于,包括:
2.根据权利要求1所述的摆线减速器,其特征在于,所述弧形侧面的曲率半径等于所述针齿主体的半径。
3.根据权利要求1所述的摆线减速器,其特征在于,所述针齿组件包括针齿壳和针齿本体;所述针齿壳包括若干组装筒和连接相邻所述组装筒的连接结构;所述针齿本体插装于所述组装筒,以与所述组装筒形成沿周向间隔设置于所述摆线盘外围的若干所述针齿主体。
4.根据权利要求3所述的摆线减速器,其特征在于,所述连接结构包括连接相邻所述组装筒的弧形片状结构,所述弧形片状结构位于同一圆周上。
5.根据权利要求1所述的摆线减速器,其特征在于,所述传动连接部包括设置于所述中间区域中心的传动孔,所述传动凸轮的输出端组装于所述传动孔。
6.根据权利要求5所述的摆线减速器,其特征在于,包括输出结构;所述输出结构包括第一输出轴和至少一个连接销轴;所述摆线盘还设有连接孔;所述连接销轴插装于所述连接孔,且所述连接销轴的直径小于所述连接孔,以使所述第一输出轴形成预设速度的转动。
7.根据权利要求6所述的摆线减速器,其特征在于,所述摆线盘设有多个所述连接孔,所述连接孔的圆心分布于所述传动孔外围的同一圆周上。
8.根据权利要求1所述的摆线减速器,其特征在于,包括第二输出轴;所述针齿组件随所述啮合面与所述针齿主体的啮合过程产生预设速度的转动;所述第二输出轴与所述针齿组件固定连接。
9.根据权利要求1或8所述的摆线减速器,其特征在于,所述针齿主体包括相对设置的第一端和第二端;所述摆线减速器包括至少两个所述摆线盘,至少一个摆线盘形成的啮合面配合于所述第一端,至少一个所述摆线盘形成的啮合面配合于所述第二端。
10.一种机器人,其特征在于,包括关节主体和如权利要求1-9任一项所述的摆线减速器,所述摆线减速器组装于所述关节主体。
技术总结
本公开提供一种摆线减速器及机器人。摆线减速器采用了为摆线盘设置限位槽,并通过活动插装在限位槽的啮合转轴外露于限位槽的部分与间隔结构的弧形侧面形成了配合于针齿主体的啮合面。针齿主体与啮合转轴在啮合过程中发生相对转动,因此有助于降低对啮合面的加工精度要求。且间隔结构的弧形侧面使得啮合面能够与摆线轨迹匹配,将上述摆线减速器应用于机器人关节有助于提升关节运动的结构可靠性和稳定性。
技术研发人员:符景名,王勃,郭文平
受保护的技术使用者:北京小米机器人技术有限公司
技术研发日:20230330
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!