一种光刻胶灌装机的制作方法
本技术涉及光刻胶生产,具体的为一种光刻胶灌装机。
背景技术:
1、光刻胶是芯片生产中必不可缺的关键材料,在硅片制造中,光刻胶以液态涂覆在硅片的表面,干燥后形成胶膜,在曝光区域发生化学反应,造成曝光和非曝光部分在溶液中溶解性产生差异;经过适当的溶剂处理后,溶去可溶解部分,以在硅片上得到所需图样。
2、生产出来的光刻胶通常需要进行灌装,在特定的容器中保存;现有一申请号为cn201921368644.0的专利,公开了一种全自动光刻胶灌装装置,通过设置动力室与灌胶盒,将光刻胶吸出并通过灌胶口送出;该专利虽然设置了批量灌装的结构,但是其结构较为固定化,扩展以及更改配置的空间有限,在产品参数变更时难以进行调节,灵活性较差;而且其缺乏与常规设备的配套设计,难以直接置入现有流水线中使用。
技术实现思路
1、本实用新型的目的在于提供一种设置更加灵活,可以直接与常规生产设备配套使用的光刻胶灌装机。
2、基于上述目的,本实用新型采用如下技术方案:
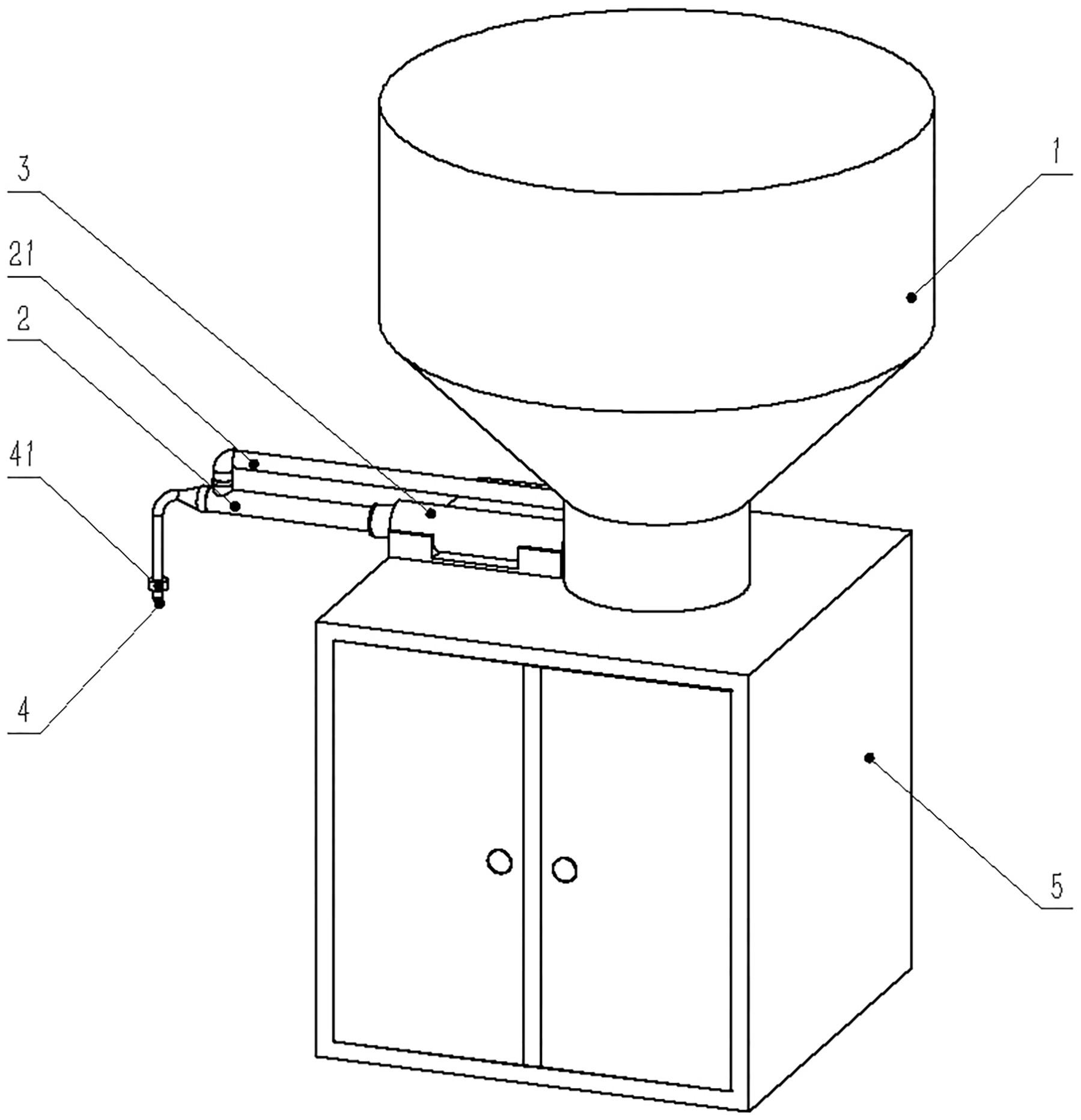
3、一种光刻胶灌装机,包括设置在底座上的储胶桶,其特征在于:储胶桶通过出胶管道连接有出胶机构,出胶机构包括与出胶管道连通的预装管;预装管的出口端连接有出胶口,预装管的另一端设置有推胶气缸;推胶气缸的活塞杆伸入预装管内,活塞杆的末端设置有密封塞结构。
4、优选地,推胶气缸的活塞杆上设置有定量气缸,定量气缸为伺服气缸;定量气缸的活塞杆末端设置有密封塞结构。
5、优选地,出胶口处设置有止回阀;出胶管道与预装管的连接处设置有止回阀。
6、优选地,底座为圆柱状结构,底座的侧壁上设置有旋转座;底座内设置有旋转伺服电机,旋转伺服电机与旋转座配合连接;旋转座上设置有取瓶机械臂,在底座的侧面分别设置有与取瓶机械臂配合的上料传送带和下料传送带。
7、优选地,取瓶机械臂包括与旋转座固定连接的连接臂,连接臂的末端固定设置有升降器,升降器通过丝杆结构连接有抓取爪。
8、优选地,连接臂为伸缩臂结构。
9、优选地,上料传送带和下料传送带之间设置有多个出胶机构,旋转座上配合地设置有多个取瓶机械臂。
10、本实用新型的有益效果有:
11、本实用新型为一种光刻胶灌装机,用于将光刻胶自动灌装到容器内;本实用新型采用预装管作为储胶桶与罐装容器之间的中间容器,通过推胶气缸将预装管内的胶体排出,整个过程光刻胶不接触任何电机、电泵,能够保持光刻胶的性质稳定;本实用新型设置了定量气缸,通过定量气缸对预装管的容量进行精确定量设置,进而能够精准设定每一次灌装的容量,实现了精确定量灌装,避免了光刻胶在灌装过程中浪费,或是由于灌装不足等缺陷导致硅片生产中的良品率下降。
12、本实用新型在出胶口处设置了止回阀,可以防止推胶气缸回程时将空气从出胶口压回预装管中,使得定量精确度下降;出胶口处的止回阀设置为对夹双瓣止回阀,通过弹簧强制复位,可以只在推胶气缸推动胶体出胶时打开,也避免了完成一次出胶之后管道内的剩余胶体流出导致浪费;本实用新型还在出胶管道与预装管的连接处设置了止回阀,可以防止出胶过程中胶体回流导致出胶量精确性下降。
13、本实用新型设置了自动抓取容器的取瓶机械臂,通过可以旋转的旋转座进行转动,将上料传送带上的容器抓取后移动到出胶机构处进行灌装,完成灌装后再移动到下料传送带上;取瓶机械臂上设置了升降器,可以将抓取爪下降以抓取传送带上的容器,或是将灌装后的容器放置到下料传送带上,也可以在抓取容器之后上升以与出胶口配合;通过设置自动的取瓶机械臂,使得本实用新型不需要特别设置上下料机构,可以直接与现有的传送带配合,设置更加方便灵活。
14、本实用新型可以在上下料传送带之间设置多组出胶机构,并且与出胶机构配合地设置多组取瓶机械臂结构,以方便同时进行多个容器的灌装工作,提高工作效率。
技术特征:
1.一种光刻胶灌装机,包括设置在底座上的储胶桶,其特征在于:所述储胶桶通过出胶管道连接有出胶机构,所述出胶机构包括与所述出胶管道连通的预装管;所述预装管的出口端连接有出胶口,预装管的另一端设置有推胶气缸;所述推胶气缸的活塞杆伸入预装管内,所述活塞杆的末端设置有密封塞结构;所述推胶气缸的活塞杆上设置有定量气缸,所述定量气缸为伺服气缸;所述定量气缸的活塞杆末端设置有密封塞结构;所述出胶口处设置有止回阀;所述出胶管道与预装管的连接处设置有止回阀。
2.根据权利要求1所述的光刻胶灌装机,其特征在于:所述底座为圆柱状结构,底座的侧壁上设置有旋转座;所述底座内设置有旋转伺服电机,所述旋转伺服电机与所述旋转座配合连接;所述旋转座上设置有取瓶机械臂,在所述底座的侧面分别设置有与所述取瓶机械臂配合的上料传送带和下料传送带。
3.根据权利要求2所述的光刻胶灌装机,其特征在于:所述取瓶机械臂包括与所述旋转座固定连接的连接臂,所述连接臂的末端固定设置有升降器,所述升降器通过丝杆结构连接有抓取爪。
4.根据权利要求3所述的光刻胶灌装机,其特征在于:所述连接臂为伸缩臂结构。
5.根据权利要求2所述的光刻胶灌装机,其特征在于:所述上料传送带和下料传送带之间设置有多个出胶机构,所述旋转座上配合地设置有多个取瓶机械臂。
技术总结
本技术涉及光刻胶生产设备技术领域,具体的为一种光刻胶灌装机,包括通过出胶管道连接到储胶桶的出胶机构;出胶机构预装管,预装管内设置有两段式的气动控制结构,能够分别进行定量控制以及推动出胶;本技术还设置了取瓶机械臂,能够自动将上料传送带上的光刻胶瓶取下进行灌装,完成后再放到下料传送带上;本技术能够实现全自动定量灌装,定量精度好;利用取料机械臂能够轻松与现有流水线传送带适配,使用设置灵活。
技术研发人员:李永斌,黄玉伟,何龙龙,陈志鹏
受保护的技术使用者:甘肃华隆芯材料科技有限公司
技术研发日:20230509
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!