一种镭射膜印刷在线纠偏检测装置及检测方法与流程
[0001]
本发明涉及定位技术领域,具体涉及一种镭射膜印刷在线纠偏检测装置及检测方法。
背景技术:
[0002]
镭射膜表面光滑、颜色多变,具有防伪、耐磨、环保等特点,被广泛应用在烟酒、食品以及广告宣传等包装上。传统镭射印刷过程中需要经历镭射印刷、湿式复合、分切等过程,容易出现诸如带材跑偏、纵向撕裂和边沿磨损等现象。特别是遇到跑偏时,如不能及时发现和纠偏,必然会造成镭射膜的浪费,影响产品质量,降低生产效率。
[0003]
目前,最为常用的检测带材跑偏技术为利用光电传感器检测带材的边缘、中心线或单一标志线。但由于镭射膜物理特性,其自身表面光滑、颜色多变,在外界光干扰情况下出现反光现象,且随位置移动颜色发生变化,检测信号干扰很大,检测效果不足。同时对检测信号进行定性分析,而无法达到定量检测,检测精度低,相应时间长。机器视觉方案则往往较为复杂,检测效率偏低。
[0004]
因此,必须对现有的跑偏检测装置和检测方案进行改进,提高检测效率和检测精度,控制系统在允许误差范围,提高生产加工效率,降低废品率。
技术实现要素:
[0005]
本发明的目的在于克服现有技术的不足,提供一种镭射膜印刷在线纠偏检测装置及检测方法。
[0006]
为实现上述目的,本发明提供了如下技术方案来实现的:
[0007]
一种镭射膜印刷在线纠偏检测装置,其特征在于:包括激光传感器模块、回滞比较器、核心控制器、和设置在镭射膜上裁切衔接区的反射区,激光传感器模块包括激光传感器安装架、激光发射传感器、激光接收传感器、滤光镜、细缝块,回滞比较器负责接收激光接收传感器反馈的激光强度电信号序号,并进行高速去抖处理,核心控制器负责接收回滞比较器的去抖信号,分析信号序列和设定的编码序列,确定跑偏方向和跑偏量;
[0008]
反射区内设有一个第一强反射条和若干个第二强反射条、第三强反射条、弱反射条,反射区的形状为矩形,第一强反射条的形状为矩形,第一强反射条沿反射区的宽度方向设置,第二强反射条形状为直角梯形,第二强反射条长边的宽度与反射区宽度相同、短边的宽度为反射区宽度的一半,第三强反射条的形状与第二强反射条形状相同,第二强反射条的直角腰贴合反射区的其中一条长边,第三强反射条的直角腰贴合反射区的另一条长边,第二强反射条和第三强反射条的短边相对设置,第二强反射条和第三强反射条在第一强反射条后循环设置,相邻强反射条之间的最小间距相同,反射区内除第一强反射条、第二强反射条、第三强反射条之外的位置设置弱反射条;
[0009]
激光传感器安装架上设有激光发射传感器安装孔、激光接收传感器安装孔,激光发射传感器安装在激光发射传感器安装孔内,激光接收传感器安装在激光接收传感器安装
孔内,激光传感器安装架上位于激光发射传感器安装孔下方的位置设有细缝块安装槽,细缝块安装槽内安装有细缝块,激光传感器安装架上位于激光接收传感器安装孔下方的位置设有滤光镜安装槽,滤光镜安装槽内安装有滤光镜;
[0010]
激光发射传感器发射的激光信号透过细缝块上的细缝发射到反射区上,滤光镜的频率与激光发射传感器、激光接收传感器相匹配,确保滤光后的信号为所需的激光信号,激光接收传感器负责接收经过滤光镜后的激光反射信号,并转换为电信号输出给回滞比较器。
[0011]
细缝块上细缝的宽度小于0.2mm。
[0012]
第一强反射条的宽度为0.4mm,第二强反射条、第三强反射条的高均为0.2mm,相邻强反射条之间的最小间距为0.2mm,反射区的长度为2mm。
[0013]
一种镭射膜印刷在线纠偏检测方法,采用镭射膜印刷在线纠偏检测装置实施,其特征在于:包括如下步骤:
[0014]
步骤1:在镭射膜的裁切衔接区印刷反射区,反射区内设有一个第一强反射条和若干个第二强反射条、第三强反射条、弱反射条,反射区的形状为矩形,第一强反射条的形状为矩形,第一强反射条沿反射区的宽度方向设置,第二强反射条形状为直角梯形,第二强反射条长边的宽度与反射区宽度相同、短边的宽度为反射区宽度的一半,第三强反射条的形状与第二强反射条形状相同,第二强反射条的直角腰贴合反射区的其中一条长边,第三强反射条的直角腰贴合反射区的另一条长边,第二强反射条和第三强反射条的短边相对设置,第二强反射条和第三强反射条在第一强反射条后循环设置,相邻强反射条之间的最小间距相同,反射区内除第一强反射条、第二强反射条、第三强反射条之外的位置设置弱反射条,
[0015]
步骤2:激光发射传感器对准反射区中间位置时产生的信号作为预设编码序列输入核心控制器;
[0016]
步骤3:激光发射传感器连续发射特定频率激光,反射区随镭射膜的匀速移动经过激光传感器模块下方,激光经反射区中的各反射条反射后由激光接收传感器接收;
[0017]
步骤4:激光接收传感器接收的激光信号传输给回滞比较器,回滞比较器对信号进行去抖处理后发送至核心控制器;
[0018]
步骤5:核心控制器分析反馈信号,并与预设的特定编码序列值进行比较,从而判断当前镭射膜所处的位置,确定跑偏方向和跑偏量。
[0019]
步骤1中,第一强反射条的宽度为0.4mm,第二强反射条、第三强反射条的高均为0.2mm,相邻强反射条之间的最小间距为0.2mm,反射区的长度为2mm。
[0020]
与现有技术相比,本发明的有益效果是:通过设计和检测反射区的特定顺序和特定形状的反射条,在不浪费印刷区的情况下对镭射膜的位置进行检测;采用激光传感发射器前安装细缝块和回滞比较器对接收信号过滤去抖等操作,提高编码序列的可识别度和识别准度,确保检测结果不受正常印刷图案和运行速度干扰,大幅提高识别准确性。
附图说明
[0021]
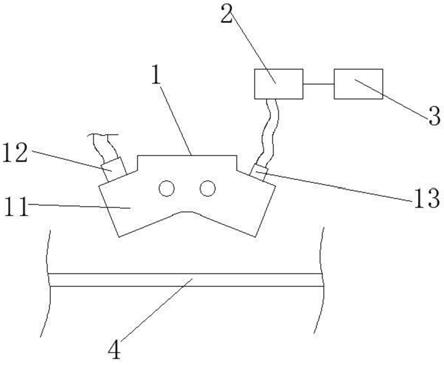
图1为本发明一种镭射膜印刷在线纠偏检测装置的结构示意图;
[0022]
图2为本发明中激光传感器模块的剖视图;
[0023]
图3为本发明中激光传感器安装架的仰视图;
[0024]
图4为本发明中镭射膜的结构示意图;
[0025]
图5为本发明中反射区的结构示意图;
[0026]
图6为本发明中激光反射信号的变化示意图。
具体实施方式
[0027]
下面结合附图1-6对本发明的实施例进行详细阐述。
[0028]
一种镭射膜印刷定位检测装置,包括激光传感器模块1、回滞比较器2、核心控制器3、和设置在镭射膜4上裁切衔接区41的反射区5,裁切衔接区41位于镭射膜4上两个有效印刷区42之间;激光传感器模块1包括激光传感器安装架11、激光发射传感器12、激光接收传感器13、滤光镜14、细缝块15,回滞比较器2负责接收激光接收传感器13反馈的激光强度电信号序号,并进行高速去抖处理,核心控制器3负责接收回滞比较器2的去抖信号,分析信号序列与设定的编码序列的差异;激光传感器安装架11上设有激光发射传感器安装孔111、激光接收传感器安装孔112,激光发射传感器12安装在激光发射传感器安装孔111内,激光接收传感器13安装在激光接收传感器安装孔112内,激光传感器安装架11上位于激光发射传感器安装孔111下方的位置设有细缝块安装槽113,细缝块安装槽113内安装有细缝块15,激光传感器安装架11上位于激光接收传感器安装孔112下方的位置设有滤光镜安装槽114,滤光镜安装槽114内安装有滤光镜14;激光发射传感器12发射的激光信号透过细缝块15上的细缝发射到反射区5上,滤光镜14的频率与激光发射传感器12、激光接收传感器13相匹配,确保滤光后的信号为所需的激光信号,激光接收传感器13负责接收经过滤光镜14后的激光反射信号,并转换为电信号输出给回滞比较器2。
[0029]
反射区5内设有一个第一强反射条51和若干个第二强反射条52、第三强反射条53、弱反射条54,反射区5的形状为矩形,第一强反射条51的形状为矩形,第一强反射条51沿反射区5的宽度方向设置,第二强反射条52形状为直角梯形,第二强反射条52长边的宽度与反射区5宽度相同、短边的宽度为反射区5宽度的一半,第三强反射条53的形状与第二强反射条52形状相同,第二强反射条52的直角腰贴合反射区5的其中一条长边,第三强反射条53的直角腰贴合反射区5的另一条长边,第二强反射条52和第三强反射条53的短边相对设置,第二强反射条52和第三强反射条53在第一强反射条51后循环设置,相邻强反射条之间的最小间距相同,反射区5内除第一强反射条51、第二强反射条52、第三强反射条53之外的位置设置弱反射条54。
[0030][0031]
作为优选,细缝块15上细缝的宽度小于0.2mm。
[0032]
作为优选,第一强反射条51的宽度为0.4mm,第二强反射条52、第三强反射条53的高均为0.2mm,反射区5的长度为2mm。
[0033]
一种镭射膜印刷定位检测方法,采用镭射膜印刷在线纠偏检测装置实施,包括如下步骤:
[0034]
步骤1:在镭射膜的裁切衔接区印刷反射区,反射区内设有一个第一强反射条和若干个第二强反射条、第三强反射条、弱反射条,反射区的形状为矩形,第一强反射条的形状为矩形,第一强反射条沿反射区的宽度方向设置,第二强反射条形状为直角梯形,第二强反
射条长边的宽度与反射区宽度相同、短边的宽度为反射区宽度的一半,第三强反射条的形状与第二强反射条形状相同,第二强反射条的直角腰贴合反射区的其中一条长边,第三强反射条的直角腰贴合反射区的另一条长边,第二强反射条和第三强反射条的短边相对设置,第二强反射条和第三强反射条在第一强反射条后循环设置,相邻强反射条之间的最小间距相同,反射区内除第一强反射条、第二强反射条、第三强反射条之外的位置设置弱反射条,
[0035]
步骤2:激光发射传感器对准反射区中间位置时产生的信号作为预设编码序列输入核心控制器;
[0036]
步骤3:激光发射传感器连续发射特定频率激光,反射区随镭射膜的匀速移动经过激光传感器模块下方,激光经反射区中的各反射条反射后由激光接收传感器接收;
[0037]
步骤4:激光接收传感器接收的激光信号传输给回滞比较器,回滞比较器对信号进行去抖处理后发送至核心控制器;
[0038]
步骤5:核心控制器分析反馈信号,并与预设的特定编码序列值进行比较,从而判断当前镭射膜所处的位置,确定跑偏方向和跑偏量。
[0039]
步骤1中,第一强反射条的宽度为0.4mm,第二强反射条、第三强反射条的高均为0.2mm,相邻强反射条之间的最小间距为0.2mm,反射区的长度为2mm。
[0040]
激光射在强反射条上,反射后最终得到一个高数值的信号,射在弱反射条上,反射后最终得到一个低数值的信号。
[0041]
最前侧的第一强反射条宽度较宽,得到高数值的信号的持续时间长,有别于其余反射条产生的信号,从而可作为起始检测信号。
[0042]
通过获得的信号与预设值做对比,即可得到现在激光射在反射区的精确位置,从而计算出隔离膜的跑偏方向和跑偏量。
[0043]
激光发射传感器对准反射区中间,即激光发射传感器相对于反射区位于a位置时,得到的信号作为初始信号;
[0044]
镭射膜跑偏后,激光发射传感器相对于反射区的位置发生改变,到达b、c位置,此时得到的信号相对于初始信号发射改变,通过分析得到的信号与初始信号的差异,根据高数值信号、低数值信号的持续时间和强反射条、低反射条的相关性,即可计算出镭射膜的跑偏位置和跑偏量。
[0045]
以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1