消除水的矿化度影响的油气水三相流微波持水率测量方法与流程
[0001]
本发明涉及工业领域中的水矿化度影响下的油气水三相流持水率测量方法。
背景技术:
[0002]
油气水三相流广泛存在于油气田开采开发过程中,其持水率动态监测对理解油井生产特性及优化油气储集层管理具有重要实际意义。然而,不同地区油气田地质构造的差异及开采时对地层水的改变等均会导致不同地层水溶液的矿化度有很大的差别,矿化度的不同会导致水相的电导率及介电常数发生变化,从而使以电学法(电导、电容和微波)为主的油气水三相流持水率测量产生偏差。
[0003]
研究表明,电导测量技术(a novel online technique for water conductivity detection of vertical upward oil
–
gas
–
water pipe flow using conductance method,measurement science and technology,2018,29:105302),伽马辐射技术(salinity independent measurement of gas volume fraction in oil/gas/water pipe flows,applied radiation and isotopes,2000,53:595-601)及微波技术(united states patent,patent no.:us6831470b2,date of patent:dec.14,2004)已被研究用于水电导率的监测及克服水的矿化度变化对多相流持水率测量的影响。电导测量技术需要设计全水捕获区以获取水电导率信息,捕获区存在堵塞风险,且在水电导率测量的实时性方面有所欠缺。伽马辐射技术存在放射性不易防护等问题。现有的微波技术包括采用一个终端开路的同轴探头等来获取混合液的介电常数和电导率,通过寻找水电导率与混合液的介电常数和电导率之间的关系来获取水的电导率信息,进而获取持水率。本发明提出的一种新的不受水矿化度影响的微波持水率测量方法。设计了容易制作的同轴馈电的矩形微带天线微波传感器,通过微波幅值衰减和相位移动同步感知混合液介电常数的变化,通过提出新的解耦方法实现水电导率的获取及不受矿化度影响的持水率测量。
技术实现要素:
[0004]
本发明的目的是提供一种新的消除水的矿化度影响的油气水三相流微波持水率测量方法,设计同轴馈电的矩形微带天线微波传感器,通过微波幅值衰减和相位移动同步感知混合液介电常数的变化,通过提出新的解耦方法实现水电导率的获取及不受矿化度影响的持水率测量,技术方案如下:
[0005]
一种消除水的矿化度影响的油气水三相流微波持水率测量系统,包括微波传感器,高频信号源,功分器,幅值衰减和相位移动检测模块、数据采集模块和计算机,所述的微波传感器包括矩形微带天线构成的传感器的发射端,以及由相同的矩形微带天线构成的传感器的接收端,二者夹持在测量管道的外管壁上,从而形成矩形微带天线微波传感器,每个矩形微带天线为矩形平面结构,包括介质基片,敷设于天线介质基片背部的参考地,敷设于介质基片正面的矩形辐射贴片以及设置在辐射贴片上的馈电点;高频信号源产生的高频信号通过功分器输出两路相同的激励信号,一路激励信号接至微波传感器发射端,透过流体
的微波由微波传感器接收端接收并与功分器分出的另一路激励信号同时接至幅值衰减和相位移动检测模块的两端,进行幅值衰减和相位移动的探测;幅值衰减和相位移动的信号通过数据采集设备被送入计算机存储。
[0006]
优选地,矩形微带天线的介质基片的长度lg=57mm,宽度wg=76mm,厚度t=1.6mm;矩形辐射贴片长度l0=28.5mm,宽度w0=38mm;馈电点处于矩形辐射贴片宽度方向的中心位置,且在长度方向距离辐射贴片的中心的距离l1=6.9mm。
[0007]
本发明同时提供采用所述的测量系统实现的油气水三相流微波持水率测量方法,包括如下步骤:
[0008]
(1)利用微波传感器发射端的同轴馈电的矩形微带天线发射微波,经过流体后由微波传感器接收端接收,通过测量系统获得微波经过流体后的微波的幅值衰减δa(db)和相位移动δθ(degree);
[0009]
(2)微波幅值衰减δa(db)和相位移动δθ(degree)与三相混合介电常数ε
m
有关,而ε
m
是持水率y
w
及水的电导率σ
w
的函数,即:δa=f
a
(y
w
,σ
w
),且δθ=f
p
(y
w
,σ
w
),为求解出水的电导率及持水率,在水的电导率变化范围内选定n个能覆盖水电导率变化范围的值σ
w1
,σ
w2
,σ
w3
,...σ
wn
,建立在固定水电导下的微波传感器的幅值衰减与真实持水率之间的关系,即及相位移动与真实持水率之间的关系,即对于同一水电导率下的流体,采用幅值衰减和相位移动获取的持水率应该相同,定义p=f
pn
(δθ)-f
an
(δa),遍历水的电导率的可能取值,当选取的电导率为真实的电导率的时候,计算得到的p值应该是最小值,即p取最小值时,对应的电导率为所要获得的水的电导率,此时求得的持水率为不受矿化度影响的真实的持水率。
[0010]
本发明由于采取以上技术方案,具有以下优点:
[0011]
(1)本发明的测量系统基于微波法,具有灵敏度高,响应速度快,性能稳定,无放射性等一系列优点。
[0012]
(2)本发明为非接触式测量,且无需设置全水捕获区域,可在三相流动过程中实时的获取水的电导率及持水率信息。
[0013]
(3)本发明的测量方法可以适用于较高水电导率的油气水三相流情况,测量精度高,水电导率适用范围较广。
附图说明
[0014]
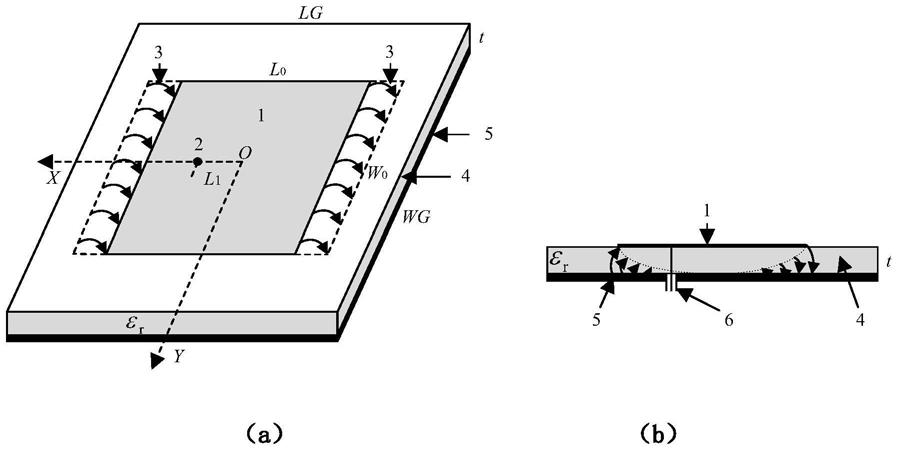
图1是同轴线馈电矩形微带天线结构图,(a)是立体示意图,(b)是侧视图。
[0015]
图2是基于矩形微带天线的微波传感器结构图。
[0016]
图3是矩形微带天线微波传感器测量系统结构图。
[0017]
图4是类泡状流结构部分的幅值衰减和相位移动在不同持水率下的扫频测量结果,(a)是类泡状流结构部分的幅值衰减在不同持水率下的扫频测量结果,(b)是类泡状流结构部分的相位移动在不同持水率下的扫频测量结果。
[0018]
图5是2.34ghz激励频率下,类泡状流结构部分的幅值衰减和相位移动与持水率的关系,(a)是2.34ghz激励频率下,类泡状流结构部分的幅值衰减与持水率的关系,(b)是2.34ghz激励频率下,类泡状流结构部分的相位移动与持水率的关系。
[0019]
图6是类段塞流结构部分的幅值衰减和相位移动在不同持水率下的扫频测量结果,(a)是类段塞流结构部分的幅值衰减在不同持水率下的扫频测量结果,(b)是类段塞流结构部分的相位移动在不同持水率下的扫频测量结果。
[0020]
图7是2.34ghz激励频率下,类段塞流结构部分的幅值衰减和相位移动与持水率的关系,(a)是2.34ghz激励频率下,类段塞流结构部分的幅值衰减与持水率的关系,(b)是2.34ghz激励频率下,类段塞流结构部分的相位移动与持水率的关系。
[0021]
图8是幅值衰减和相位移动在不同水电导率下的扫频测量结果,(a)是幅值衰减在不同水电导率下的扫频测量结果,(b)是相位移动在不同水电导率下的扫频测量结果。
[0022]
图9是2.34ghz激励频率下,幅值衰减和相位移动与水电导率的关系,(a)是2.34ghz激励频率下,幅值衰减与水电导率的关系,(b)是2.34ghz激励频率下,相位移动与水电导率的关系。
[0023]
图10是矩形微带天线微波传感器对段塞流、泡状流及混状流的输出响应,(a)是矩形微带天线微波传感器对段塞流的输出响应,(b)是矩形微带天线微波传感器对泡状流的输出响应,(c)是矩形微带天线微波传感器对混状流的输出响应。
[0024]
图11是水电导率为1000μs/cm时,段塞流不同工况下的微波幅值衰减和相位移动,(a)水电导率为1000μs/cm时,段塞流不同工况下的微波幅值衰减,(b)是水电导率为1000μs/cm时,段塞流不同工况下的微波相位移动。
[0025]
图12是水电导率为1000μs/cm时,泡状流不同工况下的微波幅值衰减和相位移动,(a)水电导率为1000μs/cm时,泡状流不同工况下的微波幅值衰减,(b)是水电导率为1000μs/cm时,泡状流不同工况下的微波相位移动。
[0026]
图13是水电导率为8000μs/cm时,段塞流不同工况下的微波幅值衰减和相位移动,(a)水电导率为8000μs/cm时,段塞流不同工况下的微波幅值衰减,(b)是水电导率为8000μs/cm时,段塞流不同工况下的微波相位移动
[0027]
图14是段塞流不同含油率下微波幅值衰减和相位移动,(a)是段塞流不同含油率下微波幅值衰减,(b)是段塞流不同含油率下微波相位移动。
[0028]
图15为段塞流水电导率为1000μs/cm时幅值衰减与快关阀结果的关系和相位移动与快关阀结果的关系,(a)为段塞流水电导率为1000μs/cm时幅值衰减与快关阀结果的关系,(b)为段塞流水电导率为1000μs/cm时相位移动与快关阀结果的关系。
[0029]
图16为段塞流水电导率为8000μs/cm时幅值衰减与快关阀结果的关系和相位移动与快关阀结果的关系,(a)为段塞流水电导率为8000μs/cm时幅值衰减与快关阀结果的关系,(b)为段塞流水电导率为8000μs/cm时相位移动与快关阀结果的关系
[0030]
图17为泡状流水电导率为1000μs/cm时幅值衰减与快关阀结果的关系和相位移动与快关阀结果的关系,(a)为泡状流水电导率为1000μs/cm时幅值衰减与快关阀结果的关系,(b)为泡状流水电导率为1000μs/cm时相位移动与快关阀结果的关系。
[0031]
图18为泡状流水电导率为8000μs/cm时幅值衰减与快关阀结果的关系和相位移动与快关阀结果的关系,(a)为泡状流水电导率为8000μs/cm时幅值衰减与快关阀结果的关系,(b)为泡状流水电导率为8000μs/cm时相位移动与快关阀结果的关系。
[0032]
图19基于最小p值的电导率确定过程。
[0033]
图20为采用幅值衰减和相位移动的持水率预测结果,(a)为采用幅值衰减的持水率预测结果,(b)为采用相位移动的持水率预测结果。
[0034]
附图标号说明:
[0035]
1、辐射贴片;2、馈电点;3、辐射缝隙;4、介质基片;5、参考地;6、同轴馈线;7、管道;8、微波传感器发射端;9、微波传感器接收端;10、信号源;11、功分器;12、解调模块;13、幅值衰减输出;14、相位移动输出。
具体实施方式
[0036]
本发明的特点在于通过设计基于同轴线馈电矩形微带天线的微波传感器及测量系统来获取微波的幅值衰减和相位移动信息,进而解耦出水的电导率和持水率。下面结合附图说明方法具体实施过程:
[0037]
(1)矩形微带天线微波传感器由两块相同的如图1所示的同轴线馈电矩形微带天线组成,一个作为发射端8,一个作为接收端9,夹持在内径为20mm,外径为30mm的管道7的外壁上,整体结构图如图2所示。为了使天线发出的电磁波能够覆盖管道测量区域,采用hfss软件对天线尺寸进行了优化,介质基片的厚度t=1.6mm,相对介电常数ε
r
=4.4。优化后的辐射贴片1长度l0=28.5mm,宽度w0=38mm,介质基片4后敷设参考地5,长度lg=57mm,宽度wg=76mm,馈电点2的位置l1=6.9mm。
[0038]
(2)本发明的矩形微带天线微波传感器测量系统如图3所示,高频信号源10发出的信号由功分器11分成相同的两路,一路由同轴馈线接至矩形微带天线微波传感器发射端8,另一路直接接至解调模块12的一端。微波信号由接收端9接收后送至解调模块的另一端,解调模块实现微波信号的幅值衰减和相位移动的解调。幅值衰减和相位移动信号输出端13和14连接到数据采集设备。
[0039]
(3)油气水三相流存在三种相态,即水相、油相和气相。油相和气相为非极性分子,二者介电常数接近且远小于水相,在采用微波法测量油气水三相流的持水率时,油相和气相可以看成是一种相态,且具有恒定的介电常数。水是极性分子,其介电常数受水的电导率的影响。平面电磁波在三相混合介质中传播时,满足:
[0040]
e=e0e
j(ωt-kz)
[0041]
其中,e0为波的幅值,t为消逝时间,z为传播距离。复传播因子k定义为:
[0042][0043]
其中,c为光速,ε
m
为三相混合介电常数。电磁波的幅值衰减δa(db)和相位移动δθ(degree)可表示为:
[0044]
δa=20log
10
exp(-k”l)=-8.68k”l
[0045]
δθ=k'l
[0046]
其中,l为有效传播距离。对于油气水三相流,ε
m
是持水率y
w
及水的电导率σ
w
的函数,则:
[0047]
δa=f
a
(y
w
,σ
w
)
[0048]
δθ=f
p
(y
w
,σ
w
)
[0049]
可以看到,微波信号的幅值衰减和相位移动均与持水率及水的电导率存在函数关系。通过定频激励后对幅值衰减和相位移动进行同步测量,然后进行联合解耦,就可以得到持水率y
w
及水的电导率。具体做法为:在水的电导率变化范围内选定n个能覆盖水电导率变化范围的值σ
w1
,σ
w2
,σ
w3
,...σ
wn
,建立在固定水电导下的微波传感器的幅值衰减与相位移动和真实持水率之间的关系,即
[0050][0051][0052]
对于同一水电导率下的流体,采用幅值衰减和相位移动获取的持水率应该相同。因此,定义p=f
pn
(δθ)-f
an
(δa),遍历水的电导率的可能取值,当选取的电导率为真实的电导率的时候,计算得到的p值应该是最小值,即p取最小值时,对应的电导率为所要获得的水的电导率,此时求得的持水率为不受矿化度影响的真实的持水率。基于上述方法,最终解决单参数测量受水矿化度影响的难题,实现不受矿化度影响的持水率测量。
[0053]
实验验证与结果:
[0054]
通过静态实验研究矩形微带天线微波传感器测量性能,并确定激励信号的频率。将矩形微带天线微波传感器接至矢量网络分析仪两个端口,研究其幅频特性及相频特性。油气水三相流的流动形态可以归纳为类泡状流结构(泡状流及液塞)及类泰勒泡结构(泰勒泡及大的气相结构)。首先研究针对类泡状流结构的矩形微带天线微波传感器的特性。水相采用1000μs/cm的水溶液,采用3#工业白油模拟分布于水中的气相和液相,在油水混合物中加入一定量的表面活性剂,将油分解成小的油滴,制成不同含水率的类泡状流结构的均质混合物进行静态实验。图4为通过矢量网络分析仪扫频后得到的不同配比的持水率的油水混合液的幅值衰减a(db)和相位移动θ(degree)(s21参数)结果。由图4(a)可以看到,当管道内全部为水时,微波信号的衰减最大,a(db)最小。随着持水率的减小,微波信号的幅值衰减减小,即a(db)变大。由图4(b)可以看到,随着持水率的减小,信号的相移度数逐渐增加,即θ
(degree)增加。我们选取2.34ghz为定频激励频率,此时的a(db)和θ(degree)参数对持水率的变化关系如图5所示。二者均与持水率的变化呈单调的关系,且关系接近线性关系,适合用于持水率参数测量。其次研究针对类泰勒泡结构的矩形微带天线微波传感器的特性。采用不同直径的圆柱形有机玻璃棒来模拟泰勒泡的结构,水相仍采用1000μs/cm的水溶液进行静态实验。图6为通过矢量网络分析仪扫频后得到的不同配比的持水率的幅值衰减和相位移动结果。由图6(a)可以看到,持水率为0时,信号的衰减最小,即a(db)最大,随着持水率的增加,微波信号的衰减增加,即a(db)变小。如图6(b)所示,随着持水率的减小,相移度数θ(degree)增加。我们选取2.34ghz为定频激励频率,此时的a(db)和θ(degree)参数对持水率的变化关系如图7所示。二者均与持水率的变化呈单调的关系,且关系接近线性关系,适合用于持水率参数测量。最后研究水的电导率变化对矩形微带天线微波传感器性能的影响。矩形微带天线微波传感器在不同电导率水溶液下的幅值衰减和相位移动的扫频结果如图8所示,随着水电导率的增加,水的介电常数的虚部逐渐增加,因此微波信号的衰减逐渐增加,微波信号的相移也逐渐增加。我们提取了2.34ghz处微波信号的幅值衰减和相位移动随水的电导率的关系,可以看到,微波信号的衰减和相位移动均与水电导率的变化呈单调的关系,且该关系接近线性。因此,当矩形微带天线微波传感器的激励频率高至2.34ghz时,水电导率的变化仍然对微波在全水中的幅值衰减和相位移动产生影响,进而影响基于微波法的持水率准确测量。
[0055]
将矩形微带天线微波传感器系统应用于水电导率变化的油气水三相流中,考察其动态测量性能,采用图3所示的方式进行定频激励,激励频率为2.34ghz。图10为水的电导率为1000μs/cm时,油气水三相流微波传感器的幅值衰减信号v
mag
和相位移动信号v
phs
。由前文的静态标定可知,不同的流动结构具有不同的幅值衰减和相位移动规律,因此需要分解出不同的流动结构信号,再分别进行持水率的计算。图10(a)为段塞流的测量信号,矩形微带天线微波传感器信号可以很好地刻画段塞流的泰勒泡结构和液塞结构的持水率波动特征。图10(b)为泡状流的测量信号,矩形微带天线微波传感器信号可以很好地刻画泡状流的持水率波动特征。图10(c)为混状流的测量信号。由于混状流没有明确的泰勒泡和液塞结构,因此输出信号的波动十分的无规律,想要得到不同结构的信号十分困难,因此基于流动结构的持水率的测量较难实现。本发明针对流动结构可明确区分的段塞流和泡状流可取的很好的效果。对于段塞流,我们通过阈值将泰勒泡结构和液塞结构区分,分别计算不同结构的幅值衰减和相位移动后进行加权平均得到最终的结果。泡状流只有一种典型流动结构,因此直接计算其幅值衰减和相位移动。图11为水的电导率为1000μs/cm时,段塞流不同工况下的微波幅值衰减和相位移动测量结果,图12为水的电导率为1000μs/cm时,泡状流不同工况下的微波幅值衰减和相位移动测量结果,可以看到,矩形微带天线微波传感器对不同工况下的两种流型均具有很好的分辨效果。图13为水的电导率为8000μs/cm时,段塞流不同工况下的微波幅值衰减和相位移动测量结果,与图11对比可知,水的电导率使微波的幅值衰减增加,即a(db)变小,使相位移动θ(degree)增加。图14为水的电导率为1000μs/cm时,不同含油率下,段塞流的微波幅值衰减和相位移动测量结果,可以看到,矩形微带天线微波传感器对含油率的变化也有很好的分辨率。
[0056]
按照上文提到的方法,计算了水电导率为1000μs/cm和8000μs/cm时的油气水三相流段塞流和泡状流的幅值衰减和相位移动参数,并研究了其与快关阀获得的真实的持水率
的关系,从而建立符合本次微波传感特性的持水率测量模型。图15(a)为水电导率为1000μs/cm时,微波在段塞流的幅值衰减结果a(db)与快关阀结果的关系,可以看到,a(db)基本与持水率呈线性关系,随着持水率的增加,幅值的衰减增加,即a(db)在减小。图15(b)为水电导率为1000μs/cm时,微波在段塞流的相位移动结果θ(degree)与快关阀结果的关系,可以看到,θ(degree)基本与持水率呈线性关系,随着持水率的增加,相位移动减小,即θ(degree)在减小。通过线性拟合,得到了水电导率为1000μs/cm时,a(db)和θ(degree)与持水率y
w
的关系。图16(a)为水电导率为8000μs/cm时,微波在段塞流的幅值衰减结果a(db)与快关阀结果的关系,图16(b)为水电导率为8000μs/cm时,微波在段塞流的相位移动结果θ(degree)与快关阀结果的关系。由于水电导率的增加,使微波信号的幅值衰减增加,即a(db)减小。水电导率的增加使微波的相位移动增加,即θ(degree)增加。图17(a)为水电导率为1000μs/cm时,微波在泡状流的幅值衰减结果a(db)与快关阀结果的关系,图17(b)为水电导率为1000μs/cm时,微波在泡状流的相位移动结果θ(degree)与快关阀结果的关系。图18(a)为水电导率为8000μs/cm时,微波在泡状流的幅值衰减结果a(db)与快关阀结果的关系,图18(b)为水电导率为8000μs/cm时,微波在泡状流的相位移动结果θ(degree)与快关阀结果的关系。泡状流在水电导率增加的情况下展现出了与段塞流相似的变化规律。总结图15-18可以得到如下结论:幅值衰减和相位移动对持水率均呈线性关系。说明幅值衰减和相位移动对不同电导率下的持水率均有分辨。水电导率的增加使幅值衰减对应的线性关系整体向衰减增大方向移动,使相位移动对应的线性关系整体向相位增大方向移动。水电导率对上述关系的斜率基本无影响,只影响截距的变化。由前文静态标定可知,水电导率对幅值衰减和相位移动的影响接近线性关系,因此可以认为水电导率与上述关系的截距成线性关系。因此可标定获得不同水电导率对应的上述关系表达式。进而,我们提出了如下的解耦方法:在电导率变化范围内,穷举可能的电导率,在每一个电导率下,得到对应的幅值衰减和持水率的关系f
an
和相位移动与持水率的关系f
pn
。将测得的幅值衰减和相位移动带入相应的公式,计算得到两种方法得到的持水率结果,定义p为两种方法得到的持水率结果的差值的平均值。在真实的水电导率下,通过幅值衰减和相位移动两种方法得到的持水率应该是相同的,此时的p值应该是计算的最小值。那么在计算过程中,穷举水电导率值,得到相应的p值,当p值取最小值的时候,此时对应的电导率的值为水的真实的电导率,计算的持水率为所要求得的持水率。图19为基于最小p值的电导率确定过程。我们仅选取典型的水的电导率来验证方法的有效性。可以看到,对于水电导率为1000μs/cm的段塞流和泡状流工况,我们枚举了电导率为0μs/cm,1000μs/cm,3000μs/cm,5000μs/cm,7000μs/cm,8000μs/cm及9000μs/cm几个电导率,确定出不同电导率对应的幅值衰减和相位移动与持水率的关系,将测得的水电导率为1000μs/cm时的幅值衰减和相位移动带入上述关系并进行p值计算。当枚举的水的电导率为1000μs/cm时,此时的p值最小,即1000μs/cm为此时的水的电导率的值,此时计算的持水率为所要求得的持水率。同理,水电导率为8000μs/cm也能通过该方法被确定出来,即枚举的水电导率为8000μs/cm时p值最小。图20为确定了水电导率后通过幅值衰减和相位移动进行持水率计算的结果,可以看到,提出的方法可以获取水的电导率信息,进而实现不受矿化度影响的持水率测量。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1