基于长短时神经网络与自动编码机的风电齿轮箱状态监测方法与流程
1.本发明涉及一种基于双向长短时神经网络自动编码机的风电齿轮箱状态监测方法。
背景技术:
2.随着信息融合技术的快速发展,现代机电系统通过安装多类型传感器、智能仪表等设备,可以实现了对运行状态、过程的实时监测和健康评估。随着机器学习和深度学习技术的快速发展,数据驱动模型成为机电设备尤其是风电齿轮箱故障检测的有效方法。考虑到风电齿轮箱运行过程中采集的数据是多维时序数据,因此基于多维时序数据对风电齿轮箱进行状态监测和故障诊断变得十分重要。然而,多维时序数据的处理和分析是存在较大难度:首先,数据的不同维度之间存在潜在关联和相互影响,导致风电齿轮箱故障检测和辨识。其次,风电齿轮箱时刻处于变转速变转矩的非平稳运行工况,其数据体量大、多源异构且动态性强等,导致大数据处理更加困难。
技术实现要素:
3.针对上述问题,本发明提出了一种基于双向长短时神经网络自动编码机的风电齿轮箱状态监测模型,结合双向长短时神经网络采用滑动窗口的方式分割样本,捕获多维时序数据中的时间依赖关系,通过学习大量正常样本,将多维非线性时序数据重构映射到低维空间,在此基础上通过对比分析重构样本和原始样本差异,实现风电齿轮箱状态监测和故障诊断。与其他方法相比,本发明提出的方法可以有效处理高维度时序数据,能够较好的应用于风电齿轮箱变工况运行环境。
4.本发明解决其技术问题所采用的技术方案是:
5.一种基于长短时神经网络与自动编码机的风电齿轮箱状态监测方法,包括以下步骤:
6.步骤1)对于风电齿轮箱原始高维时序数据d={n*f},其中,n 是样本数量,f是样本维度;采用滑动窗口对样本进行划分,得到i 个新样本,其中窗口宽度设定为l,窗口滑动步长设定为s,得到分割后的数据集d’={i*n*f};
7.其中,对于基于滑动窗口的时序数据样本划分方法,窗口宽度设定值l至关重要,窗口宽度较大时,可以较好挖掘数据集样本内在的时序依赖关系,但是与此同时会降低自编码器模型对异常故障的敏感性;窗口宽度较小时,异常故障可以被有效分离,但是会破坏原始样本中时序数据的依赖关系,从而导致自编码器模型难以有效学习到风电齿轮箱健康工况的数据特征和运行状态;
8.步骤2)考虑到风电齿轮箱多信息融合传感器的量化尺度存在较大差异,采用线性变换对数据进行标准化处理,得到归一化后的高维时序数据,基于min-max归一化方法进行处理,如式(1)所示:
[0009][0010]
其中,y’为归一化后的数据集,y为原始数据集,是数据集的平均值,max(y)是数据集的最大值,min(y)是数据集的最小值;
[0011]
步骤3)引入双向长短时神经网络自动编码机对样本进行特征提取和样本重构,针对风电齿轮箱多信息传感数据的时序特性,自动编码机采用lstm作为编码器和解码器,在得到归一化的样本数据集后,采用自编码器将模型的学习目标设置为数据集样本自身,同时将原始样本集合重映射到低维样本特征空间从而学习原始样本的关键特征,以此实现数据样本的降维、特征提取与筛选,其中,选取将原始数据样本映射到低维特征空间的模块作为模型的编码器,选取提取筛选后的特征重构样本的模块作为模型的解码器;
[0012]
该神经网络包括编码器和解码器两部分,其中,编码器和解码器均融合了双向长短时神经网络,repeatvector层和dense全连接层是为了使重建样本与原样本具有同样的维度,其中,repeatvector层的原理是将输入重复若干次后输出;
[0013]
步骤4)风电齿轮箱异常状态监测和辨识,在对风电齿轮箱原始数据样本编码降维提取得到筛选特征与解码重构样本的过程中,双向长短时神经网络自动编码机模型会产生误差;因此,在神经网络训练阶段,向自动编码机中输入正常数据,通过迭代减小重构序列和原始序列的均方根误差来学习风电齿轮箱健康工况下样本序列的关键特征和模式;基于上述前提,在使用自编码器模型进行测试时,齿轮箱健康工况序列样本的重构误差较小,而故障工况下序列样本的重构误差较大,因此选用该误差作为对风电齿轮箱异常状态监测的指标系数。
[0014]
进一步,所述步骤3)中,双向长短时神经网络自动编码机中,网络由两个独立的长短时神经网络组成,且具有两个结构一致但方向相反的隐藏层;第一层长短时神经网络用以计算样本当前时刻的正向节点信息,第二次层长短时神经网络用以计算样本当前时刻的反向节点信息,两个隐藏层单独计算当前时刻的节点状态和输出信息,同时向前反馈到相同的输出层;在训练时,由于两个网络无互相作用,因此可以作为一个通用的前馈网络,其反向传播过程也与长短时神经网络类似,唯一的不同是传播到输出层后,返回给两个隐藏层以不同的方向传播,完成对权重的更新。
[0015]
再进一步,所述步骤4)中,风电齿轮箱异常状态监测和辨识算法的过程为:对于经过分割的风电齿轮箱原始序列数据样本,可以用一个l*f大小的矩阵进行标识,同理,经过重构的风电齿轮箱序列数据样本矩阵尺度也为l*f,当滑动窗口宽度较大时,滑动窗口中的样本数据会包含多个时间点数据,因此选取本中心时刻的状态标签作为该窗口下时间样本的状态标签;而后,选取该滑动窗口下中心时刻的风电齿轮箱原始序列和重构序列作为目标样本,计算其对应的均方根误差作为风电齿轮箱异常状态监测的指标系数;若计算得到的风电齿轮箱异常状态监测的指标系数超过给定的失效阈值,则判定风电齿轮箱出现故障。
[0016]
本发明的有益效果为:有效处理高维度时序数据,能够较好的应用于风电齿轮箱变工况运行环境。
附图说明
[0017]
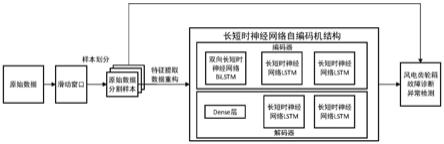
图1是基于长短时神经网络自动编码机的风电齿轮箱状态监测方法的流程图。
[0018]
图2是长短时神经网络自动编码机结构图。
[0019]
图3是双向长短时神经网络结构图。
[0020]
图4是风电齿轮箱状态监测异常辨识流程图。
具体实施方式
[0021]
下面结合附图对本发明做进一步说明。
[0022]
参照图1~图4,一种基于长短时神经网络自动编码机的风电齿轮箱状态监测方法,包括以下步骤:
[0023]
步骤1)对于风电齿轮箱原始高维时序数据d={n*f},其中,n 是样本数量,f是样本维度;采用滑动窗口对样本进行划分,得到i 个新样本,其中窗口宽度设定为l,窗口滑动步长设定为s,得到分割后的数据集d’={i*n*f};
[0024]
其中,对于基于滑动窗口的时序数据样本划分方法,窗口宽度设定值l至关重要,窗口宽度较大时,可以较好挖掘数据集样本内在的时序依赖关系,但是与此同时会降低自编码器模型对异常故障的敏感性;窗口宽度较小时,异常故障可以被有效分离,但是会破坏原始样本中时序数据的依赖关系,从而导致自编码器模型难以有效学习到风电齿轮箱健康工况的数据特征和运行状态;
[0025]
步骤2)考虑到风电齿轮箱多信息融合传感器的量化尺度存在较大差异,采用线性变换对数据进行标准化处理,得到归一化后的高维时序数据,基于min-max归一化方法进行处理,如式(1)所示:
[0026][0027]
其中,y’为归一化后的数据集,y为原始数据集,是数据集的平均值,max(y)是数据集的最大值,min(y)是数据集的最小值;
[0028]
步骤3)引入双向长短时神经网络自动编码机对样本进行特征提取和样本重构,针对风电齿轮箱多信息传感数据的时序特性,自动编码机采用lstm作为编码器和解码器,在得到归一化的样本数据集后,采用自编码器将模型的学习目标设置为数据集样本自身,同时将原始样本集合重映射到低维样本特征空间从而学习原始样本的关键特征,以此实现数据样本的降维、特征提取与筛选,其中,选取将原始数据样本映射到低维特征空间的模块作为模型的编码器,选取提取筛选后的特征重构样本的模块作为模型的解码器;
[0029]
该神经网络主要包括编码器和解码器两部分,其中,编码器和解码器均融合了双向长短时神经网络,repeatvector层和dense全连接层是为了使重建样本与原样本具有同样的维度,其中,repeatvector 层的原理是将输入重复若干次后输出;
[0030]
具体的,双向长短时神经网络自动编码机如图1所示,该网络由两个独立的长短时神经网络组成,且具有两个结构一致但方向相反的隐藏层。第一层长短时神经网络用以计算样本当前时刻的正向节点信息,第二次层长短时神经网络用以计算样本当前时刻的反向节点信息,两个隐藏层单独计算当前时刻的节点状态和输出信息,同时向前反馈到相同的
输出层;在训练时,由于两个网络无互相作用,因此可以作为一个通用的前馈网络,其反向传播过程也与长短时神经网络类似,唯一的不同是传播到输出层后,返回给两个隐藏层以不同的方向传播,完成对权重的更新;
[0031]
步骤4)风电齿轮箱异常状态监测和辨识,在对风电齿轮箱原始数据样本编码降维提取得到筛选特征与解码重构样本的过程中,双向长短时神经网络自动编码机模型会产生误差;因此,在神经网络训练阶段,向自动编码机中输入正常数据,通过迭代减小重构序列和原始序列的均方根误差来学习风电齿轮箱健康工况下样本序列的关键特征和模式;基于上述前提,在使用自编码器模型进行测试时,齿轮箱健康工况序列样本的重构误差较小,而故障工况下序列样本的重构误差较大,因此选用该误差作为对风电齿轮箱异常状态监测的指标系数;
[0032]
风电齿轮箱异常状态监测和辨识算法的过程如图4所示:对于经过分割的风电齿轮箱原始序列数据样本,可以用一个l*f大小的矩阵进行标识,同理,经过重构的风电齿轮箱序列数据样本矩阵尺度也为l*f,当滑动窗口宽度较大时,滑动窗口中的样本数据会包含多个时间点数据,因此选取本中心时刻的状态标签作为该窗口下时间样本的状态标签;而后,选取该滑动窗口下中心时刻的风电齿轮箱原始序列和重构序列作为目标样本,计算其对应的均方根误差作为风电齿轮箱异常状态监测的指标系数;若计算得到的风电齿轮箱异常状态监测的指标系数超过给定的失效阈值,则判定风电齿轮箱出现故障。
[0033]
本说明书的实施例所述的内容仅仅是对发明构思的实现形式的列举,仅作说明用途。本发明的保护范围不应当被视为仅限于本实施例所陈述的具体形式,本发明的保护范围也及于本领域的普通技术人员根据本发明构思所能想到的等同技术手段。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1