一种考虑乘员舒适度的智能车制动停车能力测试方法与流程
[0001]
本发明涉及一种智能车制动停车能力测试方法,特别涉及一种考虑乘员舒适度的智能车制动停车能力测试方法。
背景技术:
[0002]
自动驾驶技术的成熟有助于提高交通畅通能力和减少交通事故的发生,智能车(《汽车驾驶自动化分级》5级驾驶自动化)可实现完全自动驾驶,使得乘员可以在行车过程中轻松的处理与驾驶无关的事情。随着自动驾驶技术的发展,对其各项功能的测试关系着各类道路使用主体的安全保障。
[0003]
智能车制动、停车的测试方法目前基本着重于安全维度,而对于制动过程中乘员体验维度仍缺乏系统的测试规范。由于自动驾驶车辆制动减速度具有非线性特性,难以用简易数学方程准确的描述其变化趋势,同时,车辆乘员舒适度具有主观特性,个体存在差异,国内外示范区在该领域内测试场景规范制定上缺乏统一高效评价标准。
技术实现要素:
[0004]
为了解决上述技术问题,本发明提供一种考虑乘员舒适度的智能车制动停车能力测试方法,包括以下步骤:
[0005]
(1)构建测试场地,确定受试乘员和受试自动驾驶车辆;
[0006]
所述的测试场地应满足如下要求:
[0007]
路面干燥,没有明显可见的潮湿处;
[0008]
试验路面与测试轮胎间峰值附着系数大于0.9;
[0009]
试验路面应为直道并且平坦,无明显的凸起、凹坑、裂缝等不良情况,其水平平面度小于1%,长度不小于400m;
[0010]
试验过程中,在试验道路两边3m以内及静止目标车前方25m内不能有任何车辆、障碍物;
[0011]
所述的受试乘员根据我国人口性别、年龄分布比例来确定人数、性别比例及年龄分布,其中还包括不同程度晕车症状的受试者。
[0012]
(2)建立制动测试的速度条件:在一定的初始速度区间,以固定速度间隔,设定数个不同初始速度u0;在最大减速度a
b max
至最小减速度a
b min
区间内,以一定的制动减速度间隔,设定数个不同制动减速度a
b
,其中,最大减速度a
b max
不超过地面最大制动力所能提供的减速度,即减速度,即为峰值附着系数;最小减速度a
b min
不低于国标规定的最小制动减速度,即a
b min
≥a
iso
;其中,a
iso
为iso6597规定汽车冷试验最小制动减速度;
[0013]
(3)在测试场地内,受试乘员乘坐受试自动驾驶车辆,以受试自动驾驶车辆开始制动至车辆停止的过程为测试内容,实时采集受试自动驾驶车辆制动减速度、车辆行驶瞬时速度;
[0014]
(4)测试过程中采集各受试者在受试自动驾驶车辆进行不同制动减速度的制动试
验时的舒适度主观感受,包括“非常舒适”“较舒适”“较不舒适”以及“非常不舒适”四个主观评价指标,作为该受试者在对应初始速度u0与制动减速度a
b
的舒适度加权系数w,通过调整加权系数w体现所采集的受试者四个主观评价指标,w数值越高,代表该数据在曲线拟合过程中越重要,在本试验中,舒适度与w数值大小应为正相关关系;
[0015]
(5)采用层次分析法(analytic hierarchy process,ahp)确定舒适度加权系数w的数值:
[0016]
对于上一步骤采集的舒适度主观感受,通过两两评价指标之间重要度的比较构造合理的判断矩阵,得到比较判断矩阵,对判断矩阵依次按列规范化、行平均,得到权重向量,并对其进行一致性检验,满足一致性检验即可得到“非常舒适”“较舒适”“较不舒适”以及“非常不舒适”所对应舒适度的加权系数;
[0017]
(6)基于受试者采集处理得到的离散的统计数据,结合受试者主观评价系数w加权,采用加权最小二乘法作为曲线拟合方法得到制动减速度最优曲线,相应的方程组如下:
[0018][0019]
式中,l为所采集的数据量;w
i
、u
0i
和a
bi
分别为第i组数据的舒适度加权系数、制动初始速度和制动减速度;n为根据拟合程度所选取的最适宜多项式次数;a0,a1,
…
,a
n
为多项式拟合系数;
[0020]
求解上述方程组可以得到最优制动减速度随初始速度变化的数学表达式:
[0021]
a
coft
=a
b
=a0+a1u0+a2u
02
+
…
+a
n
u
0n
[0022]
式中,a
coft
为最优制动减速度;u0为初始速度;
[0023]
以a
coft
作为乘员舒适度评价依据,当自动驾驶车辆采用不大于最优制动减速度a
coft
的制动减速度a
b
制动时,认为该车辆符合乘员舒适度要求,否则认为未达到舒适度指标。
[0024]
(7)设计测试场景:
[0025]
该测试场景的受试自动驾驶车辆制动过程分为三部分,行为节点分别为点a、b、c:受试自动驾驶车辆以设计初始速度u0匀速自动驾驶至a点,到达a点时开始制动;在a至b的路段内,制动力持续呈线性增加,当到达b点时受试车辆的制动力增至f
p
、减速度增至a
be
,此时受试车辆以瞬时速度u
e
继续行驶,且u
e
>0;受试车辆以瞬时速度u
e
、减速度a
be
经过b点驶向c点,b至c路段内制动力和减速度恒定不变,在c点处速度u
c
=0;
[0026]
根据待测车辆车型选定制动初始速度u0,进一步确定测试路线上三个制动点位置a
iso
、a
comfort
和a
risk
:
[0027]
当且仅当目标减速度时制动距离s
ac
最小,此制动点为最危险的制动点,记为a
risk
,因为若车辆超过此处后采取制动行为会有很大风险无法在预定停车位置停车;当a
be
=a
iso
时,制动距离s
ac
=s
acrange
达到国标允许范围内最大值,此制动点为最大允
许范围的制动点,记为a
iso
,在此制动点开始制动是国际标准允许最大的制动距离;当考虑乘员舒适度时,由制动减速度最优曲线得到在当前测试制动初始速度下最优制动减速度a
coft
,得到其对应制动距离s
accomfort
,同时由于a
b
=a
coft
<a
bmax
,可知其制动距离s
accomfort
的取值范围为s
acmin
<s
accomfort
<s
acrange
,此制动点记为a
comfort
;
[0028]
(8)在该测试场景中,待测自动驾驶车辆以预设的初始速度进入测试路段,自主进行制动行为,评价标准如下所示:
[0029]
待测车辆制动行为发生在a
risk
后、制动行为发生在制动点a
iso
前或停车点超过预设停车点c,认为待测车辆无法满足安全维度要求,评价等级记为“不合格”;
[0030]
待测车辆能够在预设停车点c处制动停车,认为满足安全维度要求,进一步对制动停车乘员舒适度进行评价:
[0031]
待测车辆制动行为发生在a
iso
与a
comfort
之间时,认为满足乘员体验维度要求,评价等级记为“舒适”;
[0032]
待测车辆制动行为发生在a
comfort
后,认为无法满足乘员体验维度要求,评价等级记为“不舒适”。
[0033]
进一步的,步骤(7)根据如下计算理论确定点a、b、c及制动点位置a
iso
、a
comfort
和a
risk
:
[0034]
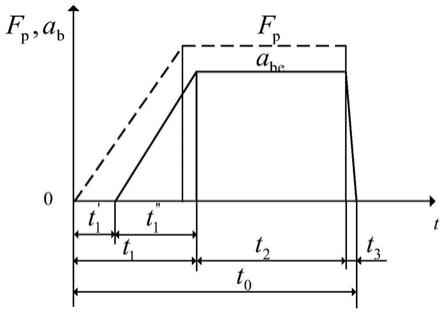
受试自动驾驶车辆制动器制动过程分为三部分:制动器起作用、持续制动和放松制动器;
[0035]
1)在制动器起作用阶段t1时间段内:
[0036]
由于制动蹄是由回弹位弹簧牵引,蹄片与制动鼓间存在间隙,所以制动蹄片接触制动鼓要经过时间t
’1,地面制动力才能起作用并使车辆产生减速度,因此,时间段t
’1内车辆为匀速运动,t
’1段内的速度恒定为u0,t
’1段车辆驶过的距离为s
’1=u0t
’1;
[0037]
在制动器起作用之后的时间段t1″
,由自动驾驶车辆根据测试场景进行自主决策,使车辆制动减速度a
b
从a
b0
呈线性增长至需要的制动减速度a
be
;因式中故∫du=∫ktdt,则t1″
时的车速为因则得到t=t
″1时间段的距离
[0038]
由上述可得在t1段制动的距离
[0039]
2)在持续制动阶段t2时间段内:
[0040]
制动力达到恒定值f
pe
,汽车减速度达到所需值a
be
并保持恒定做匀减速运动,此阶段初速度为u
e
,末速度为零,带入u
e
得到t2段的制动距离为
[0041]
由上述1)和2)可得总制动距离为由于t1′
和t1″
很小,显然,a
be
越大,总制动距离s越小;
[0042]
a至b路段的制动距离s
ab
计算方法为
[0043]
b至c路段的制动距离s
bc
计算方法为
[0044]
a至c路段的制动距离s
ac
计算方法为
[0045]
本发明的有益效果:
[0046]
本发明针对自动驾驶的制动停车场景全过程,提出一种考虑乘员舒适度感受的智能车制动、停车测试方法,兼顾安全与体验两个维度,采用离散数据的曲线拟合方法,将试验采集的乘员主观舒适度与客观行车数据结合,反复在敏感人群(试验群体可以是找“晕车”人群)进行测试验证,最终得到“制动减速度最优曲线”,旨在考虑乘员舒适度的情况下为评估自动驾驶车辆制动时乘员舒适度提供评价量化标准,将涉及自动驾驶停车类的相关测试项目提升到安全和舒适并重的高度。为自动驾驶车辆制动停车性能的多维度评价提供了理论依据和技术支撑。本发明首先解决了车辆乘员舒适度具有主观特性、个体存在差异的问题,创新性采用加权的曲线拟合方式对主观评价与客观指标进行关联,并通过建立自动驾驶中制动距离与制动减速度的数学关系,以采取制动行为的位置作为评价指标,构建考虑乘客舒适度的自动驾驶制动、停车能力测试场景,使测试效率更高,可重复性更强,同时降低测试成本,完成制动停车的舒适度量化评价,为自动驾驶车辆制动决策优化提供统一有效的理论依据与研究方法。
附图说明
[0047]
图1为本发明简化的自动驾驶车辆制动过程减速度变化折线示意图;
[0048]
图2为本发明测试场景的车辆行为示意图;
[0049]
图3为本发明测试场景的制动点示意图。
具体实施方式
[0050]
本发明提供的一种考虑乘员舒适度的智能车制动停车能力测试方法,包括以下步骤:
[0051]
(2)构建测试场地,确定受试乘员和受试自动驾驶车辆;
[0052]
所述的测试场地应满足如下要求:
[0053]
路面干燥,没有明显可见的潮湿处;
[0054]
试验路面与测试轮胎间峰值附着系数大于0.9;
[0055]
试验路面应为直道并且平坦,无明显的凸起、凹坑、裂缝等不良情况,其水平平面度小于1%,长度不小于400m;
[0056]
试验过程中,在试验道路两边3m以内及静止目标车前方25m内不能有任何车辆、障碍物;
[0057]
所述的受试乘员根据我国人口性别、年龄分布比例来确定人数、性别比例及年龄分布,其中还包括不同程度晕车症状的受试者,因为此类乘员对车辆速度、制动减速度的体
验比普通人更为敏感;选定不同性别、年龄的调查对象j名。
[0058]
待测智能车应满足行驶里程不高于5000km;试验前燃油量应达到油箱容积的90%以上;对于可外接充电的新能源车辆,试验前一天,按照gb/t18385-20055.1对动力蓄电池完全充电;对于不可外接充电的新能源车辆,按照车辆正常运行状态准备试验。
[0059]
(2)建立制动测试的速度条件:在一定的初始速度区间,以固定速度间隔,设定数个不同初始速度u0;在最大减速度a
b max
至最小减速度a
b min
区间内,以一定的制动减速度间隔,设定数个不同制动减速度a
b
,其中,最大减速度a
b max
不超过地面最大制动力所能提供的减速度,即减速度,即为峰值附着系数;最小减速度a
b min
不低于国标规定的最小制动减速度,即a
b min
≥a
iso
;其中,a
iso
为iso6597规定汽车冷试验最小制动减速度;根据测试场景与待测自动驾驶车辆要求设置一组制动初始速度m个,并在合理区间内设定一组制动减速度k个。
[0060]
(3)在测试场地内,受试乘员乘坐受试自动驾驶车辆,以受试自动驾驶车辆开始制动至车辆停止的过程为测试内容,实时采集受试自动驾驶车辆制动减速度、车辆行驶瞬时速度;
[0061]
(4)测试过程中采集各受试者在受试自动驾驶车辆进行不同制动减速度的制动试验时的舒适度主观感受,包括“非常舒适”“较舒适”“较不舒适”以及“非常不舒适”四个主观评价指标,作为该受试者在对应初始速度u0与制动减速度a
b
的舒适度加权系数w,通过调整加权系数w体现所采集的受试者四个主观评价指标,w数值越高,代表该数据在曲线拟合过程中越重要,在本试验中,舒适度与w数值大小应为正相关关系;
[0062]
(5)采用层次分析法(analytic hierarchy process,ahp)确定舒适度加权系数w的数值:
[0063]
对于上一步骤采集的舒适度主观感受,通过两两评价指标之间重要度的比较构造合理的判断矩阵,结果见表1。
[0064]
表1重要程度比较结果
[0065]
准则层非常舒适较舒适较不舒适非常不舒适非常舒适1379较舒适1/3157较不舒适1/71/513非常不舒适1/91/71/31
[0066]
得到比较判断矩阵j为:
[0067][0068]
对判断矩阵j按列规范化,得到矩阵:
[0069][0070]
对判断矩阵j进行行平均,得到权重向量:
[0071][0072]
计算该评价指标的判断矩阵j最大特征根γ
max
:
[0073][0074]
为保证评判思想逻辑一致性,使各评判之间协调一致,而不会出现内部矛盾,故对其进行一致性检验。一致性指标c.i.为:
[0075][0076]
通过查阅《平均随机一致性指标c.r.取值》,得到n=4时,c.r.=0.9,因此
[0077][0078]
故认为所得比较矩阵判断结果可以接受。
[0079]
因此,得到“非常舒适”“较舒适”“较不舒适”以及“非常不舒适”所对应舒适度加权系数为0.58,0.29,0.09和0.05。
[0080]
(6)基于受试者采集处理得到的离散的统计数据,结合受试者主观评价系数w加权,采用加权最小二乘法作为曲线拟合方法得到制动减速度最优曲线,相应的方程组如下:
[0081][0082]
式中,l为所采集的数据量;w
i
、u
0i
和a
bi
分别为第i组数据的舒适度加权系数、制动初始速度和制动减速度;n为根据拟合程度所选取的最适宜多项式次数;a0,a1,
…
,a
n
为多项式拟合系数;
[0083]
求解上述方程组可以得到最优制动减速度随初始速度变化的数学表达式:
[0084]
a
coft
=a
b
=a0+a1u0+a2u
02
+
…
+a
n
u
0n
[0085]
式中,a
coft
为最优制动减速度;u0为初始速度;
[0086]
以a
coft
作为乘员舒适度评价依据,当自动驾驶车辆采用不大于最优制动减速度
a
coft
的制动减速度a
b
制动时,认为该车辆符合乘员舒适度要求,否则认为未达到舒适度指标。
[0087]
(7)设计测试场景:
[0088]
传统车辆制动过程分为4个阶段:驾驶人收到信号后作出反应、制动器起作用、持续制动、放松制动器,而自动驾驶车辆对信号的感知、决策和执行操作时间远小于驾驶人的反应时间,本发明忽略这一阶段的耗时,受试自动驾驶车辆制动器制动过程分为三部分:制动器起作用、持续制动和放松制动器;绘制简化的自动驾驶车辆减速度折线图如附图1所示。
[0089]
1)在制动器起作用阶段t1时间段内:
[0090]
由于制动蹄是由回弹位弹簧牵引,蹄片与制动鼓间存在间隙,所以制动蹄片接触制动鼓要经过时间t
’1,地面制动力才能起作用并使车辆产生减速度,因此,时间段t
’1内车辆为匀速运动,t
’1段内的速度恒定为u0,t
’1段车辆驶过的距离为s
’1=u0t
’1;
[0091]
在制动器起作用之后的时间段t1″
,由自动驾驶车辆根据测试场景进行自主决策,使车辆制动减速度a
b
从a
b0
呈线性增长至需要的制动减速度a
be
;因式中故∫du=∫ktdt,则t1″
时的车速为因则得到t=t
″1时间段的距离
[0092]
由上述可得在t1段制动的距离
[0093]
2)在持续制动阶段t2时间段内:
[0094]
制动力达到恒定值f
pe
,汽车减速度达到所需值a
be
并保持恒定做匀减速运动,此阶段初速度为u
e
,末速度为零,带入u
e
得到t2段的制动距离为
[0095]
由上述1)和2)可得总制动距离为由于t1′
和t1″
很小,显然,a
be
越大,总制动距离s越小;
[0096]
该测试场景的受试自动驾驶车辆制动过程分为三部分,如附图2所示,行为节点分别为点a、b、c:受试自动驾驶车辆以设计初始速度u0匀速自动驾驶至a点,到达a点时开始制动;在a至b的路段内,制动力持续呈线性增加,当到达b点时受试车辆的制动力增至f
p
、减速度增至a
be
,此时受试车辆以瞬时速度u
e
继续行驶,且u
e
>0;
[0097]
a至b路段的制动距离s
ab
计算方法为
[0098]
受试车辆以瞬时速度u
e
、减速度a
be
经过b点驶向c点,b至c路段内制动力和减速度恒定不变,在c点处速度u
c
=0;
[0099]
b至c路段的制动距离s
bc
计算方法为
[0100]
a至c路段的制动距离s
ac
计算方法为
[0101]
根据待测车辆车型选定制动初始速度u0,进一步确定测试路线上三个制动点位置a
iso
、a
comfort
和a
risk
:
[0102]
当且仅当目标减速度时制动距离s
ac
最小,此制动点为最危险的制动点,记为a
risk
,因为若车辆超过此处后采取制动行为会有很大风险无法在预定停车位置停车;当a
be
=a
iso
时,制动距离s
ac
=s
acrange
达到国标允许范围内最大值,此制动点为最大允许范围的制动点,记为a
iso
,在此制动点开始制动是国际标准允许最大的制动距离;当考虑乘员舒适度时,由制动减速度最优曲线得到在当前测试制动初始速度下最优制动减速度a
coft
,得到其对应制动距离s
accomfort
,同时由于a
b
=a
coft
<a
bmax
,可知其制动距离s
accomfort
的取值范围为s
acmin
<s
accomfort
<s
acrange
,此制动点记为a
comfort
;得到测试场景的制动点示意图如附图3。
[0103]
(8)在待测车辆状态确认完毕后,开始进行自主制动停车测试。在该测试场景中,待测自动驾驶车辆以预设的初始速度进入测试路段,自主进行制动行为,根据如下评判标准对该待测自动驾驶车辆制动停车中安全与体验两个维度进行评价:
[0104]
待测车辆制动行为发生在a
risk
后、制动行为发生在制动点a
iso
前或停车点超过预设停车点c,认为待测车辆无法满足安全维度要求,评价等级记为“不合格”;
[0105]
待测车辆能够在预设停车点c处制动停车,认为满足安全维度要求,进一步对制动停车乘员舒适度进行评价:
[0106]
待测车辆制动行为发生在a
iso
与a
comfort
之间时,认为满足乘员体验维度要求,评价等级记为“舒适”;
[0107]
待测车辆制动行为发生在a
comfort
后,认为无法满足乘员体验维度要求,评价等级记为“不舒适”。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1