一种地下巷道掘进装备实时定位系统及方法与流程
[0001]
本发明涉及工程机械定位技术领域,具体涉及一种地下巷道掘进装备实时定位系统及方法。
背景技术:
[0002]
随着煤矿装备技术的发展,国内煤矿巷道从以往以人工为主的掘进方式逐步实现了机械化掘进,但人工还不能完全从煤矿巷道中完全解放。我国煤矿巷道掘进以悬臂式掘进机为主,煤矿掘进工作面仍然是我国煤矿事故多发区,亟需提高掘进装备自动化和智能化水平,对于确保我国煤矿安全高效生产具有极其重要的意义。
[0003]
掘进机是目前煤矿巷道掘进的重要机械设备,要实现掘进机的自动化作业,首先要解决的就是在煤矿巷道中对掘进机的精确定位。煤矿巷道掘进过程中产生的大量粉尘、噪音和存在极大安全隐患,若通过人工在煤矿巷道中测量定位,对操作手造成极大的健康威胁和安全隐患,除此之外,人工测量受到操作手自身的身体条件和煤矿巷道环境的影响,测量精度低。因此为保障定位精度、减少人工操作,对掘进机自动化和无人化作业提出了迫切的要求。
[0004]
综上所述,急需一种地下巷道掘进装备实时定位系统及方法以解决现有技术中存在的问题。
技术实现要素:
[0005]
本发明目的在于提供一种地下巷道掘进装备实时定位系统及方法,以解决煤矿巷道中对掘进机的精确定位问题。
[0006]
为实现上述目的,本发明提供了一种地下巷道掘进装备实时定位系统,包括后视棱镜、定位棱镜、全站仪、测站点棱镜、吊篮和惯性测量单元;后视棱镜和吊篮安装在巷道的顶板上;定位棱镜和惯性测量单元安装在掘进装备上,吊篮位于后视棱镜与掘进装备之间,吊篮内设有全站仪和测站点棱镜。
[0007]
本发明还提供了一种地下巷道掘进装备实时定位方法,采用了上述的实时定位系统,包括以下步骤:
[0008]
步骤一:通过全站仪设站的方式获得全站仪和大地的坐标转换关系;
[0009]
步骤二:用全站仪测掘进装备上定位棱镜的坐标,获得定位棱镜在全站仪坐标系下的坐标,通过坐标转换关系算出定位棱镜在大地坐标系下的坐标;
[0010]
步骤三:结合定位棱镜在掘进装备上固定的安装位置,定位棱镜坐标与掘进装备中心点坐标之间的平移关系,算出掘进装备中心点在大地坐标系下的坐标(x0,y0,z0);
[0011]
步骤四:通过安装在掘进装备上的惯性测量单元,获得掘进装备的俯仰角、横滚角和偏航角。
[0012]
进一步地,步骤一具体是:使用全站仪测量分别测出后视棱镜坐标p
后
(x
后
,y
后
,z
后
)及测站点棱镜坐标p
测
(x
测
,y
测
,z
测
);将吊篮内的全站仪调平,获取后视棱镜在全站仪坐标系
下的原始测量数据p1(水平角、垂直角、斜距);
[0013]
结合p
测
、p
后
、p1,通过全站仪设站的方式找出地理坐标系与全站仪坐标系之间的关系,首先计算p
测
到p
后
两点连线的方位角a、地理坐标系与全站仪坐标系x轴的夹角θ,即绕z轴旋转角度θ=a-ha,地理坐标系和全站仪坐标系的旋转矩阵t
(地到站)
,将全站仪原始数据转换为笛卡尔直角坐标:
[0014]
(ha,va,sd)
→
(x
站
,y
站
,z
站
)
[0015]
hd=sd*sin(va);
[0016]
x
站
=hd*cos(ha);
[0017]
y
站
=hd*sin(ha);
[0018]
z
站
=sd*cos(va);
[0019]
得到地理坐标系与全站仪坐标系的关系为:
[0020]
(x
地
,y
地
,z
地
)=t
(地到站)
*(x
站
,y
站
,z
站
)
[0021]
其中,ha为水平角,va为垂直角,hd为平距,sd为斜距。
[0022]
进一步地,所述惯性测量单元内含有三个单轴加速度计和三个单轴激光陀螺仪;三个单轴加速度计提供掘进装备在行驶工作过程中在x、y、z轴三个相交垂直方向上实时的加速度a
x
、a
y
、a
z
;三个单轴激光陀螺仪用于测量围绕着x、y、z三个轴的角加速度α
β
、α
α
、α
γ
。
[0023]
进一步地,通过对三个加速度a
x
、a
y
、a
z
二次积分,得到x、y、z轴方向上的位移δx、δy、δz,进而得到行驶过程中,掘进装备相对于大地坐标系的坐标(x0+δx,y0+δy,z0+δz)。
[0024]
进一步地,通过对三个角加速度α
β
、α
α
、α
γ
二次积分,得到掘进装备围绕着x、y、z三个轴的角度偏移量(δβ、δα、δγ);进而得到行驶过程中,掘进装备的实时姿态角度为(β0+δβ,α0+δα,γ0+δγ)。
[0025]
应用本发明的技术方案,具有以下有益效果:
[0026]
本发明基于全站仪和惯性测量单元,通过在巷道上方安装后视棱镜与吊篮,并在吊篮上安装上一个棱镜作为测站点,得到了地理坐标系与全站仪坐标系的转换关系,根据定位棱镜坐标与掘进装备中心坐标点间的平移关系,可得掘进装备在地理坐标系下的坐标,进而利用惯性测量单元能够实时得到掘进装备的六个位姿参数,实现掘进装备的精准定位,提高了定位的精度和准确度。本发明能够实现自动实时定位,结构简单,操作方便,减少了人工测量,降低了安全事故发生的可能性。
[0027]
除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
附图说明
[0028]
构成本申请的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
[0029]
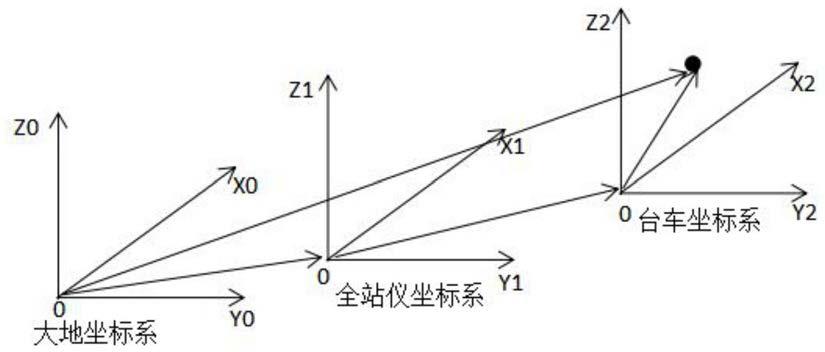
图1是煤矿巷道从台车坐标系到大地坐标系的混合变换示意图;
[0030]
图2是一种地下巷道掘进装备实时定位系统;
[0031]
其中,1、后视棱镜,2、定位棱镜,3、全站仪,4、惯性测量单元。
具体实施方式
[0032]
以下结合附图对本发明的实施例进行详细说明,但是本发明可以根据权利要求限定和覆盖的多种不同方式实施。
[0033]
实施例1:
[0034]
参见图1、图2,其中,图1为煤矿巷道从掘进装备(台车)坐标系到大地坐标系的混合变换示意图,以煤矿巷道掘进方向为x轴,垂直于巷道方向为z轴建立右手坐标系。确定某一物体的空间位置,可以通过对一个物体在某一坐标参考系中的横向偏移、纵向偏移以及竖向偏移三个偏移量,也就是某一坐标系下的x、y、z的数值。以及在其坐标系下横滚角度、偏航角度、俯仰角度三个旋转角度,即这六个物理参数详细、准确的描述空间内任意物体的空间位置及姿态。
[0035]
图2是一种地下巷道掘进装备实时定位系统示意图,所述实时定位系统包括后视棱镜1、定位棱镜2、全站仪3、测站点棱镜、吊篮和惯性测量单元4;后视棱镜和吊篮安装在巷道的顶板上;定位棱镜2和惯性测量单元4安装在掘进装备上,吊篮位于后视棱镜与掘进装备之间,吊篮内设有全站仪和测站点棱镜。
[0036]
具体的实时定位方法如下:
[0037]
通过设站的方式,获得地理坐标系与全站仪坐标系的转换关系。在巷道上方安装后视棱镜与吊篮,并在吊篮上安装上一个棱镜作为测站点,使用全站仪测量分别测出后视棱镜坐标p
后
(x
后
,y
后
,z
后
)及测站点棱镜坐标p
测
(x
测
,y
测
,z
测
),取下吊篮上的测站点棱镜,将全站仪安装在吊篮上并调平,获取后视棱镜在全站仪坐标系下的原始测量数据p1(水平角(ha)、垂直角(ha)、斜距(sd)),结合p
测
、p
后
、p1,通过全站仪设站的方式找出地理坐标系与全站仪坐标系之间的关系,首先计算p
测
到p
后
两点连线的方位角a、地理坐标系与全站仪坐标系x轴的夹角θ,即绕z轴旋转角度θ=a-ha,地理坐标系和全站仪坐标系的旋转矩阵t
(地到站)
,将全站仪原始数据转换为笛卡尔直角坐标:
[0038]
(ha,va,sd)
→
(x
站
,y
站
,z
站
)
[0039]
hd=sd*sin(va);
[0040]
x
站
=hd*cos(ha);
[0041]
y
站
=hd*sin(ha);
[0042]
z
站
=sd*cos(va);
[0043]
得到地理坐标系与全站仪坐标系的关系为:
[0044]
(x
地
,y
地
,z
地
)=t
(地到站)
*(x
站
,y
站
,z
站
)
[0045]
其中,ha为水平角,va为垂直角,hd为平距,sd为斜距。
[0046]
定位棱镜安装在掘进装备上,与掘进装备的中心坐标点之间有一定的平移关系,即已知定位棱镜的地理坐标均可算出掘进装备的地理坐标。全站仪可自动跟踪测量掘进装备上定位棱镜的位置,测量得到定位棱镜坐标,此坐标为定位棱镜在全站仪坐标系下的坐标,通过地理坐标系与全站仪坐标系的转换关系,可得定位棱镜在地理坐标系下的坐标,根据定位棱镜坐标与掘进装备中心坐标点间的平移关系,可得掘进装备在地理坐标系下的坐标(x0,y0,z0)。
[0047]
确定某一物体的空间位置,可以通过对一个物体在某一坐标参考系中的横向偏移、纵向偏移以及竖向偏移三个偏移量,也就是某一坐标系下的x、y、z的数值。以及在其坐
标系下横滚角度、偏航角度、俯仰角度三个旋转角度,即这六个物理参数,可详细、准确的描述空间内任意物体的空间位置及姿态。
[0048]
掘进装备行走过程中,通过掘进装备上安装的惯性测量单元(内含三个单轴加速度计、三个单轴激光陀螺仪),由三个加速度计提供掘进装备在行驶工作过程中在x、y、z三个相交垂直方向上实时的加速度a
x
、a
y
、a
z
,通过对加速度对时间的积分可以得到各个方向上的速度分量v
x
、v
y
、v
z
,再次对时间进行积分可以得到各个方向上的位移δx、δy、δz。此时车身坐标系坐标原点相对于大地坐标系或巷道坐标系的坐标则为(x0+δx,y0+δy,z0+δz)。通过车载的惯性测量单元中的激光陀螺仪,测得围绕着x、y、z三个轴的角加速度α
β
、α
α
、α
γ
,通过对时间的积分得到围绕着x、y、z三个轴的角速度ω
β
、ω
α
、ω
γ
,进一步对角速度对时间积分,得到设备围绕着x、y、z三个轴的角度偏移量(δβ、δα、δγ)。进一步得到装备在行驶过程中的实时姿态角度为(β0+δβ,α0+δα,γ0+δγ)。
[0049]
由上述步骤,装备在地下巷道坐标系下的六个位姿参数就全部得出。
[0050]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1