一种基于浮力平衡自重、自稳定的大型六自由度运动模拟系统的制作方法
[0001]
本发明涉及运动模拟系统技术领域,具体涉及一种基于浮力平衡自重、自稳定的大型六自由度运动模拟系统。
背景技术:
[0002]
舰船作战在军事领域中始终扮演着一个重要角色。在舰船航行过程中,尤其在恶劣海况条件下,舰船摇摆会对舰船上装备的作业造成很大影响。舰船作战海域海况复杂多变,不同海况条件均对舰船实际作战指挥、作战效能、舰机安全产生不同程度的影响。摸清舰、机、弹、人、装备对各类作战使用海况及极限作业海况边界,是舰船设计的基础和关键。
[0003]
装备舰船的大型设备众多,如舰载机、起吊车辆、舵机、升降机等,重量高达几十吨甚至上百吨,尺寸达几十米。传统陆上六自由度运动模拟系统,受限于驱动系统的动力行程或功率,其试验台面面积通常不超过100平方米,台面及负载总重通常不超过100吨。因此,传统陆基六自由度运动模拟系统难以实现对上述舰载机等大型装备的运动环境下相关性能模拟验证。
技术实现要素:
[0004]
本发明要解决的技术问题在于针对上述现有技术存在的针对大型或超大型设备难以利用常规运动模拟系统开展运动环境相关性能测试的问题,利用水的浮力,设计一种基于浮力平衡自重、自稳定的大型六自由度运动模拟系统,能够大幅提升运动模拟系统模拟验证能力。
[0005]
本发明为解决上述提出的技术问题所采用的技术方案为:
[0006]
一种基于浮力平衡自重、自稳定的大型六自由度运动模拟系统,包括水池、浮球、六组驱动传递装置、运动平台和模拟运动控制系统;
[0007]
所述浮球位于水池中;
[0008]
所述六组驱动传递装置环绕浮球分布,每组驱动传递装置包括绞车、卷筒、传动滑轮、下滑轮、上滑轮和缆绳,所述上滑轮安装于与运动平台台面平行的浮球最大圆周上,所述下滑轮安装于水池底部,所述绞车和传动滑轮安装于所述水池上,卷筒安装于绞车输出轴上,每组驱动传递装置的卷筒、传动滑轮、下滑轮、上滑轮之间通过所述缆绳依次进行连接,以将绞车的驱动力传递至所述浮球;
[0009]
所述运动平台固定安装于浮球上方,用于安装受试设备;
[0010]
所述模拟运动控制系统包括计算机和六通道驱动系统;所述计算机内置模拟运动控制软件,用于设定试验工况六自由度运动相关参数,通过运动学公式将运动信息解算为缆绳的长度变化信息,并将缆绳的长度变化信息转化为驱动控制信息;所述六通道驱动系统根据驱动控制信息控制绞车运动。
[0011]
上述方案中,所述下滑轮在水池底部的布置呈一个六边形a,所述上滑轮两个并列
一组在浮球圆周上均匀布置呈一个六边形b,便于实现对浮球运动的精准控制;六边形a的面积大于六边形b的面积,同时六边形a的各个顶点位于所述运动平台的最大运动范围之外。
[0012]
上述方案中,大型六自由度运动模拟系统还包括配重球,所述配重球固定安装于浮球的下方;配重球的质量大于运动平台、浮球和受试设备总质量的%,进而使六自由度运动模拟平台和受试设备的重心低于六自由度运动模拟平台浸没于水中的稳心。
[0013]
上述方案中,所述传动滑轮、下滑轮、上滑轮均为内侧护板夹角为60
°±5°
的外开口滑轮,运动平台在一定范围的运动过程中,缆绳可以在上述开口滑轮的开口中摇摆。
[0014]
上述方案中,所述计算机有线连接所述六通道驱动系统,六通道驱动系统有线连接所述绞车。
[0015]
上述方案中,所述绞车采用能够精确控制缆绳收放的电动绞车或液压绞车。
[0016]
上述方案中,每组驱动传递装置的绞车与传动滑轮固定在同一个固定基座上,该固定基座安装于水池的台面上。
[0017]
本发明的工作原理:1)水池注入适量水,将受试设备系固于运动平台上,运动模拟平台准备就绪;2)在模拟运动控制系统中设定试验工况六自由度运动相关参数,计算机通过运动学公式将上述运动信息解算为缆绳的长度变化信息;3)计算机将缆绳的长度变化信息转化为驱动控制信息;4)模拟运动控制系统通过驱动控制信息控制绞车运动;5)驱动传递装置带动浮球实施六自由度运动,进而带动运动平台及受试设备运动,完成受试设备在设定运动环境下的相关性能验证。
[0018]
本发明的有益效果在于:
[0019]
1.本发明依靠浮球的浮力平衡运动平台、配重球、受试设备及浮球本身的重力,相比传统陆上运动模拟系统,节约了用于克服运动平台自重、受试设备自重的驱动能量。在驱动功率相当的条件下,本发明可以建造更大平台尺寸、更高承载的运动模拟平台,模拟验证性能可大幅提升。经试验证明,本申请运动平台台面面积可由约100平方米提升至1000平方米以上,负载总重可由约100吨提升至500吨以上,跨越式提升了运动模拟系统的模拟验证性能。
[0020]
2.本发明在确定受试设备重量、试验方案后,将在水下进行适应性配重,系统重心向下偏移,进而使得整个系统处于自稳定状态系统的重心在稳心的下部,减小了运动平台上受试设备在动态测试过程中偏载现象的影响。
[0021]
3.本发明在满足上述平衡自重的条件下,仍然保证系统具有一定的正浮力,当绞车控制缆绳放开一定长度时,借助预留正浮力可使得缆绳一直处于绷紧状态,继而通过准确控制缆绳长度,实现模拟运动平台的六自由度运动的预期控制。
[0022]
4.本发明中大型设备的互换性程度高,对于不同类型的大型设备,只需要设计不同的配重,即可测试受试设备在不同环境下的动态性能指标。
[0023]
5.鉴于以上理由,本发明可以广泛应用于多种行业中大型及超大型设备的运动环境适应性测试。
附图说明
[0024]
下面将结合附图及实施例对本发明作进一步说明,附图中:
[0025]
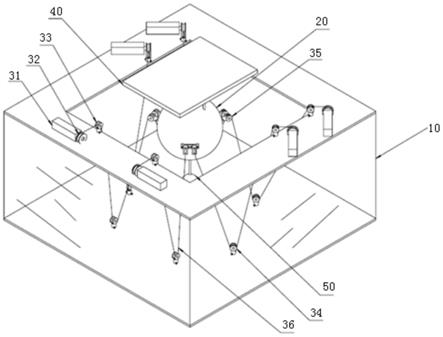
图1是本发明大型六自由度运动模拟系统的结构示意图。
[0026]
图中:10、水池;20、浮球;31、绞车;32、卷筒;33、传动滑轮;34、下滑轮;35、上滑轮;36、缆绳;40、运动平台;50、配重球。
具体实施方式
[0027]
为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图详细说明本发明的具体实施方式。
[0028]
如图1所示,为本发明实施例提供的一种基于浮力平衡自重、自稳定的大型六自由度运动模拟系统,包括水池10、浮球20、六组驱动传递装置、运动平台40和模拟运动控制系统。浮球20位于水池10中,用于产生浮力。六组驱动传递装置环绕浮球20分布,每组驱动传递装置包括绞车31、卷筒32、传动滑轮33、下滑轮34、上滑轮35和缆绳36。其中,绞车31和传动滑轮33安装于水池10上,卷筒32安装于绞车31输出轴上,上滑轮35安装于与运动平台40台面平行的浮球20最大圆周上,下滑轮34安装于水池10底部,每组驱动传递装置的卷筒32、传动滑轮33、下滑轮34、上滑轮35之间通过缆绳36依次进行连接。绞车31为整个系统的运动提供直接驱动力,通过缆绳36、卷筒32、下滑轮34、上滑轮35将驱动力传递至浮球20。卷筒32用于收放缆绳36。传动滑轮33、下滑轮34用于调整缆绳36具体走向,以便将缆绳36的载荷更合理的分配并传递至浮球20。缆绳36是驱动力传递的直接中介,缆绳36的一端始于卷筒32,且在卷筒32上缠绕一圈之后,沿卷筒32的圆周切线方向向传动滑轮33延伸,缆绳36在经过传动滑轮33之后向下滑轮34延伸,在经过下滑轮34之后向上滑轮35延伸,且缆绳36的另一端固定于上滑轮35。
[0029]
运动平台40为受试设备的直接承载载体,其通过圆形连杆固连在浮球20之上。
[0030]
模拟运动控制系统图未示用于实现运动模拟试验参数的设定、试验过程的控制以及试验数据的采集和管理。模拟运动控制系统主要包括计算机和六通道驱动系统,其中计算机有线连接六通道驱动系统,六通道驱动系统有线连接绞车31。计算机内置模拟运动控制软件,用于设定试验工况六自由度运动相关参数,通过运动学公式将运动信息解算为缆绳36的长度变化信息,并将缆绳36的长度变化信息转化为驱动控制信息。六通道驱动系统根据驱动控制信息控制绞车31运动。
[0031]
本发明大型六自由度运动模拟系统的工作原理:1)水池10注入适量水,将受试设备系固于运动平台40上,运动模拟平台准备就绪;2)在模拟运动控制系统中设定试验工况六自由度运动相关参数,计算机通过运动学公式将上述运动信息解算为缆绳36的长度变化信息;3)计算机将缆绳36的长度变化信息转化为驱动控制信息;4)模拟运动控制系统通过驱动控制信息控制绞车31运动;5)驱动传递装置带动浮球20实施六自由度运动,进而带动运动平台40及受试设备运动,完成受试设备在设定运动环境下的相关性能验证。
[0032]
进一步优化,下滑轮34在水池10底部的布置呈一个六边形a,上滑轮35在浮球20特定圆周上的布置呈一个短边较短近似于正三角分布的六边形b,这样的分布设计便于实现对浮球20运动的精准控制。六边形a的面积大于六边形b的面积,同时六边形a的各个顶点位于运动平台40的最大运动范围之外。
[0033]
进一步优化,本发明大型六自由度运动模拟系统还包括配重球50,配重球50通过圆形连杆固定安装于浮球20的下方。配重球50为球形,用于调节运动模拟系统的重心。配重
球50在水中运动时各个方向具有相同的阻力。配重球50的质量与运动平台40、浮球20和受试设备的总质量有关,本实施例中配重球50的质量大于运动平台40、浮球20和受试设备总质量的20%,进而使六自由度运动模拟平台和受试设备的重心低于六自由度运动模拟平台浸没于水中的稳心。
[0034]
进一步优化,传动滑轮33、下滑轮34、上滑轮35均为内侧护板夹角为60
°±5°
的外开口滑轮,运动平台40在一定范围的运动过程中,缆绳36可以在上述开口滑轮的开口中摇摆。
[0035]
进一步优化,绞车31采用能够精确控制缆绳36收放的电动绞车或液压绞车。
[0036]
进一步优化,每组驱动传递装置的绞车31与传动滑轮33固定在同一个固定基座上,该固定基座安装于水池10的台面上。
[0037]
本发明基于浮力平衡自重、自稳定的大型六自由度运动模拟系统主要应用于大型六自由度运动模拟系统的设计,模拟舰船、车辆等大型装备作业过程中的摇摆、俯仰、升沉运动,其实施步骤如下:
[0038]
1、在水池10中搭建运动模拟平台,搭建完毕后在水池10慢慢注入水,直至运动平台40静止于水面之上,此时缆绳36均处于绷紧状态;
[0039]
2.通过六通道驱动系统,控制运动平台40的位置和姿态,进而控制六条缆绳36的收放,使得运动平台40达到合适的工作高度和工作角度;
[0040]
3.按照受试设备的动态性能测试要求进行测试,运动平台40随着上述要求进行运动,直至该项测试完毕,随即进行下一项的测试。
[0041]
本发明由于采取以上技术方案,模拟系统具有以下优点:
[0042]
1.本发明依靠浮球20的浮力平衡运动平台40、配重球50、受试设备及浮球20本身的重力,相比传统陆上运动模拟系统,节约了用于克服运动平台40自重、受试设备自重的驱动能量。在驱动功率相当的条件下,本发明可以建造更大平台尺寸、更高承载的运动模拟平台,模拟验证性能可大幅提升。经试验证明,本申请运动平台40台面面积可由约100平方米提升至1000平方米以上,负载总重可由约100吨提升至500吨以上,跨越式提升了运动模拟系统的模拟验证性能。
[0043]
2.本发明在确定受试设备重量、试验方案后,将在水下进行适应性配重,系统重心向下偏移,进而使得整个系统处于自稳定状态(系统的重心在稳心的下部),减小了运动平台40上受试设备在动态测试过程中偏载现象的影响。
[0044]
3.本发明在满足上述平衡自重的条件下,仍然保证系统具有一定的正浮力,当绞车31控制缆绳36放开一定长度时,借助预留正浮力可使得缆绳36一直处于绷紧状态,继而通过准确控制缆绳36长度,实现模拟运动平台40的六自由度运动的预期控制。
[0045]
4.本发明中大型设备的互换性程度高,对于不同类型的大型设备,只需要设计不同的配重,即可测试受试设备在不同环境下的动态性能指标。
[0046]
5.鉴于以上理由,本发明可以广泛应用于多种行业中大型及超大型设备的运动环境适应性测试。
[0047]
上面结合附图对本发明的实施例进行了描述,但是本发明并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本发明的启示下,在不脱离本发明宗旨和权利要求所保护的范围情况下,还可做出很多
形式,这些均属于本发明的保护之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1