抗干扰高精度中远距离定位测量钢包水口的方法及装置与流程
[0001]
本发明属于钢铁冶金技术领域,具体涉及一种抗干扰高精度中远距离定位测量钢包水口的方法及装置。
背景技术:
[0002]
钢包回转台布置在连铸机的浇铸平台上,用于把钢水罐由接钢位旋转到浇铸位进行浇铸,钢包浇铸完成后,将浇铸位的空包旋转到接钢位,同时接钢位的满包钢水旋转到浇铸位,以此完成连续浇铸。每当钢水罐旋至浇钢位时,需要将钢包长水口套装在钢水罐下方的滑动水口上,方可进行浇铸。由于每次钢包座上钢包回转台的位置不一样、每个钢包自身尺寸的差异以及钢包回转台每次旋转停位的位置差异,导致每次套装钢包长水口时被套装水口的位置不一样。
[0003]
目前采用智能化机器人套装钢包长水口主要采用图像检测或激光三维扫描进行钢包水口的定位测量,为套装长水口提供位置信息,并且为保证密封效果,要求定位精度<5mm。钢水罐套装水口时,所处的环境极为恶劣:高温、高尘、环境光照复杂,同时被测目标物表面会随着使用时间而发生变化(如氧化变黑)。
[0004]
采用激光三维扫描的方式进行钢包水口的定位测量时,可充分利用激光的特性,对环境光照不敏感,可在超过4m的距离实施测量,使激光扫描仪避开环境恶劣区域安装,保证了仪器的使用环境的要求,但是被测目标物表面的变化会导致激光扫描仪的生产三维点云的质量从而影响测量精度和工作稳定性,并且激光扫描仪在实施中远距离测量时,精度理论上为
±
5mm,实际使用时由于目标物表面状态变化或测得点云质量不高导致定位测量精度低于理论值,影响系统的正常工作。
[0005]
采用图像检测方式进行钢包水口的定位测量时,需要实施近距离测量,一般<500mm才能满足系统的测量精度,此工作区域正好处于浇铸的危险区域,受钢水的直接辐射、灰尘多、区域气流紊乱、光照复杂,这些直接干扰和影响图像成像质量,导致测量结果不稳定,同时仪器工作环境恶劣,导致硬件可靠性低。
技术实现要素:
[0006]
本发明的目的是提供一种抗干扰高精度中远距离定位测量钢包水口的方法及装置,本发明实现了中远距离的抗干扰高精度测量,成本低、布置灵活。
[0007]
本发明所采用的技术方案是:
[0008]
一种抗干扰高精度中远距离定位测量钢包水口的方法,以浇铸位上钢包水口的理论中心点为基准点,在距基准点一定距离固设两个成角度的且设有激光测距仪的线性直线运动模组;测量时,线性直线运动模组带动激光测距仪直线运动、激光测距仪垂直于线性直线运动模组连续测距,当测距值刚好进入或跳出预设的阈值内的瞬间则表明测距的位置在目标钢包水口的边缘并且线性直线运动模组记录此时激光测距仪的位置值,通过获得的位置值和已知的空间几何特征换算得到目标钢包水口的中心点在以基准点为原点的直角平
面坐标系中的空间坐标。
[0009]
进一步地,测量时,先计算得到目标钢包水口的直径d,其中d=0.5(d1+d2),d1=x
12-x
11
,d2=x
22-x
21
,d1为由一个激光测距仪得到的目标钢包水口的直径,x
11
和x
12
分别为一个激光测距仪测距到目标钢包水口的内、外侧边缘时在线性直线运动模组上的位置值,d2为由另一个激光测距仪得到的目标钢包水口的直径,x
21
和x
22
分别为另一个激光测距仪测距到目标钢包水口的内、外侧边缘时在线性直线运动模组上的位置值;
[0010]
然后计算得到目标钢包水口的中心点在两个线性直线运动模组上投影的位置值x1和x2,其中x1=x
11-0.5d,x2=x
21-0.5d;
[0011]
最后计算得到目标钢包水口的中心点在以基准点为原点的直角平面坐标系中的空间坐标(x,y),其中x=0.5[(x
1-x
01
)/sina+(x
2-x
02
)/sinb],y=0.5[(x
1-x
01
)/cosa+(x
2-x
02
)/cosb],a为一个线性直线运动模组与水平线的角度,b为另一个线性直线运动模组与水平线的角度,x
01
和x
02
分别基准点在两个线性直线运动模组上投影的位置值。
[0012]
进一步地,测量前先校准基准点,校准时,机器人抓取标准圆柱靶标模拟钢包水口放置在钢包水口的理论位置上,然后线性直线运动模组带动激光测距仪直线运动、激光测距仪垂直于线性直线运动模组连续测距,当测距值处于预设的阈值内时则表明测距的位置在标准圆柱靶标的边缘并且线性直线运动模组记录此时激光测距仪的位置值,计算得到基准点在两个线性直线运动模组上投影的位置值x
01
和x
02
,其中x
01
=x
011-0.5d0,x
02
=x
021-0.5d0,x
011
为一个激光测距仪测距到标准圆柱靶标的外侧边缘时在线性直线运动模组上的位置值,x
021
为另一个激光测距仪测距到标准圆柱靶标的外侧边缘时在线性直线运动模组上的位置值,d0为标准圆柱靶标的直径。
[0013]
进一步地,两个线性直线运动模组的轴线交点距离基准点2~10m。
[0014]
进一步地,安装两个线性直线运动模组时,两个线性直线运动模组的位置度要求为,以浇铸位上钢包水口的理论水平中心线为基准线,两个线性直线运动模组的轴线交点要尽量控制在基准线上,两个线性直线运动模组要尽量关于基准线对称。
[0015]
进一步地,两个线性直线运动模组安装在固定平台上。
[0016]
一种抗干扰高精度中远距离定位测量钢包水口的装置,包括控制模块以及两个成角度的且设有激光测距仪的线性直线运动模组,以浇铸位上钢包水口的理论中心点为基准点,两个线性直线运动模组距基准点一定距离,线性直线运动模组能带动激光测距仪直线运动、激光测距仪能垂直于线性直线运动模组连续测距,控制模块分别与线性直线运动模组和激光测距仪电连接,控制模块检测到激光测距仪的测距值刚好进入或跳出预设的阈值内时则判断测距的位置在目标钢包水口的边缘并且获得线性直线运动模组记录的此时激光测距仪的位置值,控制模块能通过获得的位置值和已知的空间几何特征换算得到目标钢包水口的中心点在以基准点为原点的直角平面坐标系中的空间坐标。
[0017]
进一步地,两个线性直线运动模组的轴线交点距离基准点2~10m。
[0018]
进一步地,以浇铸位上钢包水口的理论水平中心线为基准线,两个线性直线运动模组的轴线交点在基准线上,两个线性直线运动模组关于基准线对称。
[0019]
进一步地,两个线性直线运动模组安装在固定平台上。
[0020]
本发明的有益效果是:
[0021]
本发明的测量精度主要由线性直线运动模组的定位精度来决定,激光测距仪仅根
据用户预先设定的阈值来提供开关量信号,减少了对激光测距精度的要求,因此可以充分利用激光抗干扰强、发散性小、测量距离远的特点,可部署在距目标物中远距离外进行测量,避开环境恶劣区域,避开了恶劣环境区域对检测仪器的影响,同时充分利用线性直线运动模组重复定位精度高的特点,减少了机械设备磨损对测量精度的影响,实现了中远距离的抗干扰高精度测量,经过试验,在距离目标物4m、激光测距仪测量采样频率50hz、线性直线运动模组重复定位精度0.02mm的条件下,线性直线运动模组的运动速度若为1mm/s,则测量定位精度为0.02mm,若为5mm/s,则测量定位精度优于0.05mm;本发明仅需设置线性直线运动模组、激光测距仪和调教好的控制模块,成本低、布置灵活。
附图说明
[0022]
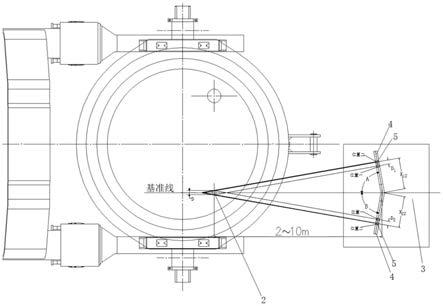
图1是本发明实施例中抗干扰高精度中远距离定位测量钢包水口的装置工作时的正视图。
[0023]
图2是本发明实施例中抗干扰高精度中远距离定位测量钢包水口的装置工作时的俯视图。
[0024]
图3是本发明实施例中校准基准点时的原理图。
[0025]
图4是本发明实施例中测量时的原理图。
[0026]
图中:1-机器人;2-钢包水口;3-固定平台;4-线性直线运动模组;5-激光测距仪;6-标准圆柱靶标。
具体实施方式
[0027]
下面结合附图和实施例对本发明作进一步的说明。
[0028]
如图1和图2所示,一种抗干扰高精度中远距离定位测量钢包水口的装置,包括控制模块以及两个成角度的且设有激光测距仪5的线性直线运动模组4,以浇铸位上钢包水口2的理论中心点为基准点,两个线性直线运动模组4距基准点一定距离,线性直线运动模组4能带动激光测距仪5直线运动、激光测距仪能5垂直于线性直线运动模组4连续测距,控制模块分别与线性直线运动模组4和激光测距仪5电连接,控制模块检测到激光测距仪5的测距值刚好进入或跳出预设的阈值内时则判断测距的位置在目标钢包水口2的边缘并且获得线性直线运动模组4记录的此时激光测距仪5的位置值,控制模块能通过获得的位置值和已知的空间几何特征换算得到目标钢包水口2的中心点在以基准点为原点的直角平面坐标系中的空间坐标。
[0029]
如图1和图2所示,一种抗干扰高精度中远距离定位测量钢包水口的方法,以浇铸位上钢包水口2的理论中心点为基准点,在距基准点一定距离固设两个成角度的且设有激光测距仪5的线性直线运动模组4;测量时,线性直线运动模组4带动激光测距仪5直线运动、激光测距仪5垂直于线性直线运动模组4连续测距,当测距值刚好进入或跳出预设的阈值内的瞬间则表明测距的位置在目标钢包水口2的边缘并且线性直线运动模组4记录此时激光测距仪5的位置值,通过获得的位置值和已知的空间几何特征换算得到目标钢包水口2的中心点在以基准点为原点的直角平面坐标系中的空间坐标。
[0030]
如图3所示,测量前先校准基准点,校准时,机器人1抓取标准圆柱靶标6模拟钢包水口2放置在钢包水口2的理论位置上,然后线性直线运动模组4带动激光测距仪5直线运
动、激光测距仪5垂直于线性直线运动模组4连续测距,当测距值处于预设的阈值内时则表明测距的位置在标准圆柱靶标6的边缘并且线性直线运动模组4记录此时激光测距仪5的位置值,计算得到基准点在两个线性直线运动模组4上投影的位置值x
01
和x
02
,其中x
01
=x
011-0.5d0,x
02
=x
021-0.5d0,x
011
为一个激光测距仪5测距到标准圆柱靶标6的外侧边缘时在线性直线运动模组4上的位置值,x
021
为另一个激光测距仪测5距到标准圆柱靶标6的外侧边缘时在线性直线运动模组4上的位置值,d0为标准圆柱靶标6的直径。校准工作完成后,可多次测量而无需再次校准。
[0031]
如图4所示,测量时,先计算得到目标钢包水口2的直径d,其中d=0.5(d1+d2),d1=x
12-x
11
,d2=x
22-x
21
,d1为由一个激光测距仪5得到的目标钢包水口2的直径,x
11
和x
12
分别为一个激光测距仪测距5到目标钢包水口2的内、外侧边缘时在线性直线运动模组4上的位置值,d2为由另一个激光测距仪5得到的目标钢包水口2的直径,x
21
和x
22
分别为另一个激光测距仪5测距到目标钢包水口2的内、外侧边缘时在线性直线运动模组4上的位置值;然后计算得到目标钢包水口2的中心点在两个线性直线运动模组4上投影的位置值x1和x2,其中x1=x
11-0.5d,x2=x
21-0.5d;最后计算得到目标钢包水口2的中心点在以基准点为原点的直角平面坐标系中的空间坐标(x,y),其中x=0.5[(x
1-x
01
)/sina+(x
2-x
02
)/sinb],y=0.5[(x
1-x
01
)/cosa+(x
2-x
02
)/cosb],a为一个线性直线运动模组4与水平线的角度,b为另一个线性直线运动模组4与水平线的角度,x
01
和x
02
分别基准点在两个线性直线运动模组4上投影的位置值。
[0032]
在本发明中,两个线性直线运动模组4的轴线交点距离基准点2~10m;两个线性直线运动模组4安装在固定平台3上。
[0033]
安装两个线性直线运动模组4时,两个线性直线运动模组4的位置度要求为,以浇铸位上钢包水口2的理论水平中心线为基准线,两个线性直线运动模组4的轴线交点要尽量控制在基准线上,两个线性直线运动模组4要尽量关于基准线对称,这样可以简化计算模型,精简计算量。
[0034]
本发明的测量精度主要由线性直线运动模组4的定位精度来决定,激光测距仪5仅根据用户预先设定的阈值来提供开关量信号,减少了对激光测距精度的要求,因此可以充分利用激光抗干扰强、发散性小、测量距离远的特点,可部署在距目标物中远距离外进行测量,避开恶劣环境区域,避开了环境恶劣区域对检测仪器的影响,同时充分利用线性直线运动模组4重复定位精度高的特点,减少了机械设备磨损对测量精度的影响,实现了中远距离的抗干扰高精度测量,经过试验,在距离目标物4m、激光测距仪5测量采样频率50hz、线性直线运动模组4重复定位精度0.02mm的条件下,线性直线运动模组4的运动速度若为1mm/s,则测量定位精度为0.02mm,若为5mm/s,则测量定位精度优于0.05mm;本发明仅需设置线性直线运动模组4、激光测距仪5和调教好的控制模块,成本低、布置灵活。
[0035]
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本发明所附权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1