一种多应答器矩阵水下定位导航系统的制作方法
1.本实用新型涉及水下定位导航系统技术领域,具体是一种多应答器矩阵水下定位导航系统。
背景技术:
2.随着科学技术的发展,水下机器人、水下无人航行器等设备的功能特性大幅提升,与此同时对水下定位导航系统的精度要求也亟需提升来匹配性能越来越强大的水下设备,应对复杂多变的水下环境。
3.usbl普遍应用于各种水下设备的定位导航,是目前最流行的定位系统。
4.但由于其测角精度相对较差的原因,其定位精度还存在提升空间,同时其所需设备相对复杂,容易出现较多的系统误差,成本也相对较高。
技术实现要素:
5.本实用新型的目的在于提供一种多应答器矩阵水下定位导航系统,以解决上述背景技术中提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案:
7.一种多应答器矩阵水下定位导航系统,包括信号源、应答体及处理器,所述信号源的输出端与应答体的输入端连接,所述应答体的输出端与处理器的输入端连接,所述处理器的输出端与信号源的输入端连接;其中,
8.所述应答体包括三个应答柱,且三个所述应答柱呈等边三角形进行安装组成,且每个所述应答柱均配置两个具有间距的应答器,信号源以一定的时间间隔发出一种声脉冲,多应答器同时工作接收该脉冲并通过此种算法进行信号处理得出信号源的位置信息,从而达到精确定位的预期功能,通过多应答器同时工作使得测距精度更高,并且运用几何关系进行计算避免因测角而产生误差,有效的提高了水下定位导航系统的精确程度,同时单向发射声脉冲相较于usbl水下定位系统对设备要求较低,可相对降低定位系统成本,其中,多应答器矩阵水下定位导航系统的原理是,首先由信号源以一定的时间间隔发出声脉冲并由应答体接收,应答体将所接收的声学信息传递给处理器进行处理,最终获得信号源的具体水下位置。
9.作为本实用新型进一步的方案:所述信号源安装在所需定位的水下设备上,并以时间间隔向应答体发射声强的声脉冲来提供位置信息。
10.作为本实用新型再进一步的方案:所述应答体与处理器之间通过有线传输,使得保真率高。
11.作为本实用新型再进一步的方案:所述处理器用以进行声脉冲信息处理,构建定位图从而获得信号源实时位置,处理器通过特定算法,接收处理来自应答体的声学信息,进而获得信号源的具体水下位置。
12.与现有技术相比,本实用新型的有益效果是:
13.本实用新型能够在避免usbl测角误差带来的影响的同时简化设备,有效的减小系统误差,提升定位系统的整体精度,并且使用方便,且本系统能够有效提高定位精度,信号源以一定的时间间隔发出声脉冲,多应答器同时工作接收该脉冲并通过此种算法进行信号处理得出信号源的位置信息,从而达到精确定位的预期功能,通过多应答器同时工作使得测距精度更高,并且运用几何关系进行计算避免因测角而产生误差,有效的提高了水下定位导航系统的精确程度,同时单向发射声脉冲相较于usbl水下定位系统对设备要求较低,可相对降低定位系统成本。
附图说明
14.图1为一种多应答器矩阵水下定位导航系统的结构示意图。
15.图2为一种多应答器矩阵水下定位导航系统中应答体的结构示意图。
16.图中:1、应答柱;2、应答器。
具体实施方式
17.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
18.请参阅图1~2,本实用新型实施例中,一种多应答器矩阵水下定位导航系统,包括信号源、应答体及处理器,所述信号源的输出端与应答体的输入端连接,所述应答体的输出端与处理器的输入端连接,所述处理器的输出端与信号源的输入端连接,其中,所述应答体包括三个应答柱1,且三个所述应答柱1呈等边三角形进行安装组成,且每个所述应答柱1均配置两个具有间距的应答器2。
19.信号源以一定的时间间隔发出一种声脉冲,多应答器2同时工作接收该脉冲并通过此种算法进行信号处理得出信号源的位置信息,从而达到精确定位的预期功能,通过多应答器2同时工作使得测距精度更高,并且运用几何关系进行计算避免因测角而产生误差,有效的提高了水下定位导航系统的精确程度,同时单向发射声脉冲相较于usbl水下定位系统对设备要求较低,可相对降低定位系统成本,其中,多应答器矩阵水下定位导航系统的原理是,首先由信号源以一定的时间间隔发出声脉冲并由应答体接收,应答体将所接收的声学信息传递给处理器进行处理,最终获得信号源的具体水下位置。
20.所述信号源安装在所需定位的水下设备上,并以时间间隔向应答体发射声强的声脉冲来提供位置信息。
21.所述应答体与处理器之间通过有线传输,使得保真率高。
22.所述处理器用以进行声脉冲信息处理,构建定位图从而获得信号源实时位置,处理器通过特定算法,接收处理来自应答体的声学信息,进而获得信号源的具体水下位置。
23.其中,处理器的处理分为两个步骤:
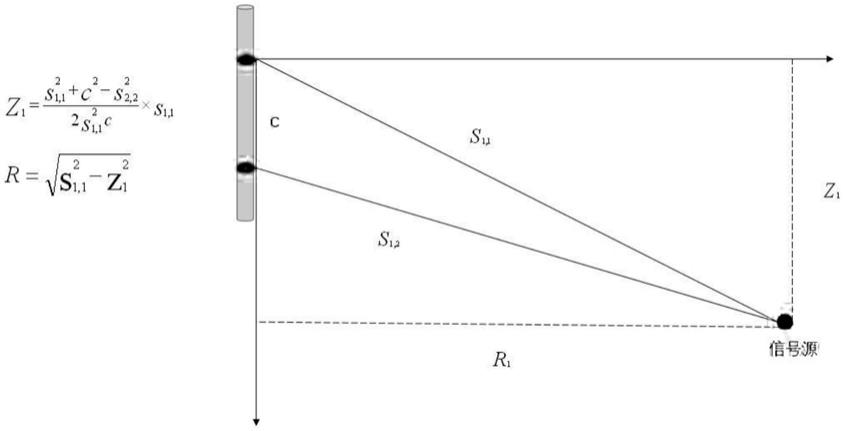
24.首先,处理器通过声强在水下的递减原理由对每个应答柱1所得的两个声脉冲信息精确计算出两个距离信息,随后根据几何计算获得信号源距离该应答柱的水平距离半径以及深度信息;
25.最后,根据三个应答柱1的三组水平距离半径进行三圆汇交进行定位,以船艏为中心建立坐标系后获得信号源的具体位置信息。
26.其算法为:
27.假设信号源所发出特定声强为a,声波是一种球面波,水下声强递减公式
[0028][0029]
应答柱1所接收两个声脉冲声强大小为a
1,1
、a
1,2
,通过计算得出斜距为 s
1,1
、s
1,2
。
[0030]
依据余弦定理计算:
[0031][0032]
同理计算出其余两个应答柱的r2与r3、z2与z3(无误差情况z1=z2=z 3
)
[0033][0034]
[0035]
解其便可获得信号源绝对位置。这便是本系统的具体算法。
[0036]
以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1