一种激光点阵光幕扫描装置的制作方法
[0001]
本实用新型涉及自动喷涂技术领域,特别涉及一种激光点阵光幕扫描装置。
背景技术:
[0002]
目前,自编程生产线已经应用于相当一部分木制家具的喷涂作业中,在自编程生产线的喷涂作业中,设备的成本和识别程序的效率对生产线有着重要影响;在喷涂作业时,为了得到工件的外形数据,通常采取两种方法:第一种方法是:采用工业相机进行图像采集,使用点云识别和深度学习等手段对工件进行轮廓识别与建模,但此方法需要采用高性能工业相机,高性能工业相机价格高昂;第二种方法是:采用激光光幕装置,对通过该装置的工件进行扫描,获得该工件的外形数据,此方法采用的激光光幕装置,售价通常动辄数十余万,成本过高。
[0003]
因此,有必要做进一步改进。
技术实现要素:
[0004]
本实用新型的目的旨在提供一种结构简单、成本低廉、扫描精度高、实用性强的激光点阵光幕扫描装置,以克服现有技术中的不足之处。
[0005]
按此目的设计的一种激光点阵光幕扫描装置,包括用于输送工件的传送模块,其特征在于:还包括激光点阵光幕检测模块和控制模块,所述激光点阵光幕检测模块安装在传送模块上,控制模块分别与传送模块、激光点阵光幕检测模块连接;激光点阵光幕检测模块由若干个激光测距传感器密集排列组成,其排列方向与传送模块的传送方向相互垂直,相邻激光测距传感器的发射-接收部分之间设有可调节的相邻距离d。
[0006]
相邻两个激光测距传感器在排列方向上交错设置,所述相邻距离d的最小值为激光测距传感器宽度的1/2。
[0007]
所述激光测距传感器集发送、接收于一体。
[0008]
所述控制模块包括plc、变频器和工控机。
[0009]
所述传送模块为传动皮带。
[0010]
所述传送模块上设置有用于对工件进行喷涂作业的喷涂模块,喷涂模块与控制模块连接。
[0011]
所述喷涂模块为喷涂机器人。
[0012]
本实用新型的激光点阵光幕扫描装置的激光点阵光幕检测模块由多个廉价激光测距传感器构成,使用多个廉价激光测距传感器构成的激光点阵光幕检测模块进行工件轮廓点阵提取构建三维模型,操作简单,比一般激光光幕装置更加节约成本,使得扫描装置的整体价格低廉,通过调节相邻激光测距传感器的发射-接收部分的相邻距离,可调节激光点阵光幕扫描装置生成的点阵的精度,以获得较为精确的工件三维点阵信息。
附图说明
[0013]
图1为本实用新型一实施例中扫描装置的整体结构简图。
[0014]
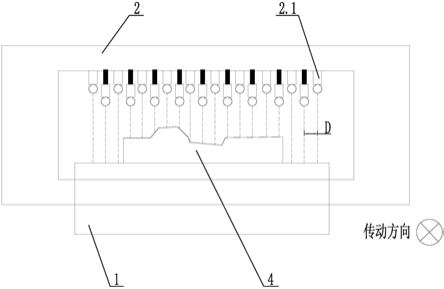
图2为本实用新型一实施例中扫描装置的整体结构示意图。
[0015]
图3为本实用新型一实施例中激光点阵光幕检测模块的排列结构示意图。
[0016]
图4为本实用新型一实施例中传送模块、激光点阵光幕检测模块和控制模块的连接关系图。
[0017]
图5为本实用新型一实施例中扫描装置的工作过程原理图。
具体实施方式
[0018]
下面结合附图及实施例对本实用新型作进一步描述。
[0019]
参见图1-图5,本激光点阵光幕扫描装置,包括用于输送工件4的传送模块1、激光点阵光幕检测模块2和控制模块3,激光点阵光幕检测模块2安装在传送模块1的合适位置,控制模块3分别与传送模块1、激光点阵光幕检测模块2电连接;激光点阵光幕检测模块2由一组激光测距传感器2.1密集排列组成,其排列方向与传送模块1的传送方向相互垂直,相邻激光测距传感器2.1的发射-接收部分之间设有可调节的相邻距离d,d的值可对激光点阵光幕扫描装置生成的点阵精度产生影响。激光点阵光幕扫描装置工作时,各激光测距传感器2.1可以记录其与工件4之间的距离信息,由控制模块3发出信号,使得激光测距传感器组每隔时间t记录一组距离信息,调整间隔时间t和传送模块1的传送速度v,使得从工件4进入激光点阵光幕检测模块2到工件4离开,激光点阵光幕检测模块2可以采集到足够多的距离信息组,根据检测到的多组距离信息构成的点阵可构建工件的三维轮廓。
[0020]
参见图2和图3,相邻两个激光测距传感器2.1在排列方向上交错设置,相邻距离d的最小值为激光测距传感器2.1宽度的1/2。为了缩短相邻激光测距传感器2.1的相邻距离d,提高激光点阵光幕扫描装置点阵的精度,可对激光测距传感器2.1进行交错排列(参见图3),在此种方法下,相邻距离d的最小值为单个激光测距传感器2.1宽度的1/2。
[0021]
激光测距传感器2.1集发送、接收于一体。
[0022]
控制模块3包括plc(可编程逻辑控制器)、变频器和工控机,也可以是其它控制器。
[0023]
传送模块1为传动皮带。
[0024]
传送模块1上设置有用于对工件4进行喷涂作业的喷涂模块5,喷涂模块5与控制模块3连接。
[0025]
喷涂模块5为喷涂机器人。
[0026]
本激光点阵光幕扫描装置在工作时,传送模块1以速度v运送工件4从激光点阵光幕检测模块2经过,从工件4前端进入激光测距传感器组的检测范围开始,由控制模块3发出信号,使得激光测距传感器组每隔时间t记录一组距离信息,从工件4进入激光点阵光幕检测模块2到工件4离开,激光点阵光幕检测模块2采集到的距离信息组可以构成点阵,用以构建工件4的轮廓;调整间隔时间t和传送模块1的传动速度v,使得点阵的精度足以准确表征工件4的轮廓特征;工件4离开激光点阵光幕检测模块2之后,控制模块3根据接收到的距离信息组构成点阵。此扫描装置的激光点阵光幕检测模块2由多个廉价激光测距传感器2.1组成,整体成本低廉,同时选择合适的激光传感器点阵密度,可在较低成本下采集到较精确的被测工件4的三维点阵信息。
[0027]
上述为本实用新型的优选方案,显示和描述了本实用新型的基本原理、主要特征和本实用新型的优点。本领域的技术人员应该了解本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等同物界定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1