一种平面度检测设备的制作方法
[0001]
本实用新型涉及一种平面度检测设备及其检测方法,属于电子设备制造领域,特别是笔记本电脑制造领域。
背景技术:
[0002]
随着人们生活水平的提高,电子设备在人们生活中随处可见,比如笔记本电脑、手机、平板电脑等等,因此,在电子设备的加工过程中需要更多的人力物力的投入以加快生产,但是一个电子设备的生产包括若干个环节和很多的零部件的生产制造以及检测;比如,在笔记本外壳生产工艺中,将薄铝板经冲压成型后,再经过点胶热压等工序安装塑件,制作成外壳后;由于材料特性、工艺等原因,笔记本外壳也会发生翘曲,需要经过人工整形后再由人工采用塞尺来检验外壳的平面度是否合格;在此过程中,人工检验平面度存在准确率、效率较低,返工率高等问题,从而直接导致的最直接的后果则是高成本、低效益。
[0003]
因此亟待一种能够解决能够自动实现平面度快速、自动化、高精度的检测方案。
技术实现要素:
[0004]
本实用新型的目的在于,解决上述问题,设计了本实用新型,提供了一种能够实现电子设备外壳平面度快速、自动化、高精度的检测设备以及对检测数据进行修正的检测方法。
[0005]
本实用新型解决其技术问题所采用的技术方案是:
[0006]
本实用新型公开一种平面度检测设备,用于电子设备外壳平面度检测,包括:
[0007]
机柜,在所述机柜的上方具有操作工台;
[0008]
激光传感器,设置于所述快装治具上方并能够检测与电子设备外壳的距离;
[0009]
平面位移机构,设置于所述操作工台上并能够控制激光传感器在平面轨迹中的移动,所述平面轨迹超出电子设备外壳所在的区域外;
[0010]
快装治具,设置于所述操作工台上并能够固定电子设备外壳;该快装治具包括底板和设置于所述底板上的纵向伸缩机构和横向伸缩机构,两伸缩机构分别包括有伸缩器、滑块和限位块,所述伸缩器连接并推动滑块移动并配合限位块从纵向或横向固定电子设备外壳。
[0011]
优选的,所述底板面向操作工位的一侧开口以利于换装电子设备外壳;快装治具上设置有多个定位销,定位销与操作工台上的定位孔之间的配合定位。
[0012]
优选的,在滑块内设置有阶梯孔,伸缩器的前端连接有拉杆,拉杆穿过限位块的阶梯孔与伸缩器的轴连接,在伸缩器与滑块之间设置有弹簧;伸缩器的轴伸出到最大行程时,弹簧被压缩且拉杆的法兰面与阶梯孔台阶面脱离。
[0013]
优选的,所述纵向伸缩机构包括纵向气缸、纵向弹簧、纵向滑轨、纵向滑块和纵向限位块;纵向滑轨设置在底板上,纵向滑块设置于纵向滑轨上并与其滑动配合,纵向气缸设置于底板上并连接纵向滑块,纵向弹簧抵于纵向滑块与纵向气缸之间,纵向纵向限位块位
于纵向滑块的对侧且两者配合从纵向固定电子设备外壳;纵向气缸和横向气缸均属于伸缩器。
[0014]
优选的,所述横向伸缩机构包括横向气缸、横向弹簧、横向滑轨、横向滑块和横向限位块;横向滑轨设置在底板上,横向滑块设置于横向滑轨上并与其滑动配合,横向气缸设置于底板上并连接横向滑块,横向弹簧抵于横向滑块与横向气缸之间,横向横向限位块位于横向滑块的对侧且两者配合从横向固定电子设备外壳。
[0015]
优选的,还包括控制单元,该控制单元控制平面位移机构移动并接收激光传感器的信号。
[0016]
优选的,在快装治具下方设置有用于检测电子设备外壳有无的到位传感器,该到位传感器向控制单元发送检测信号。
[0017]
优选的,激光传感器通过高度调节器连接到平面位移机构上,所述高度调节器包括连接台、丝杆和升降滑台,升降滑台与连接台滑动配合,丝杆设置于连接台上并与升降滑台螺纹配合,激光传感器设置于连接台上并与其同步升降,连接台与平面位移机构连接并由其控制移动。
[0018]
优选的,在机柜的操作工台的前侧、左侧和右侧分别设置有围板,机柜的底部设置有多个滚轮和脚杯;平面位移机构包括纵向直线模组和横向直线模组,纵向直线模组设置于操作工台上并用于控制激光传感器的纵向位置,横向直线模组设置于纵向直线模组上并用于控制激光传感器的横向位置。
[0019]
优选的,其检测方法,包括以下步骤:
[0020]
s1:以待测电子设备外壳的长边为x轴方向、短边为y轴方向、设定点为零点建立坐标系;s2:在底板上选取两个y轴坐标相同的测试点,记录两个测试点的x轴坐标x1和x2;读取激光传感器在两个测试点上所得到的高度数据z1和z2;建立修正参数α:
[0021]
α=(z
2-z1)/(x
2-x1);
[0022]
s3:s3:控制单元根据修正参数α对在所测数据的x轴方向参数进行修正,修正后的高度值为:
[0023]
h
修正
=h
测量点-α(x
测量点-x1)
[0024]
h测量点为测量点的高度数据;
[0025]
x测量点为测量点的x轴坐标;
[0026]
s4:根据步骤s2和s3中的修正原理对y轴方向的测量数据进行修正;
[0027]
s5:检测时,选取待测零件的同一轴(x轴或y轴)上的n个点进行高度数据测量后,取极值差异,用以表达待测零件的变形度δ:
[0028]
δ=h
修正max-h
修正min
[0029]
本实用新型的有益效果为:
[0030]
1、本方案中的检测装置,通过平面位移机构、激光器以及快装治具三者的位置配合以及控制,能够实现笔记本电脑外壳的快速平面度检测,当产品放入快装治具后,激光传感器在平面位移机构的驱动下平面移动,对产品进行测量,具有高度自动化的特点;
[0031]
2、本方案中,在机箱的底部设置脚轮与脚杯,不仅能够快速更换设备工作位置、还能够快速对机箱进行调平,从而方便于平面检测工作的进行;
[0032]
3、本方案中的快装治具能够从操作工台上拆卸更换,从而能够方便于实现不同型
号的电子设备的快速应用和兼容;4更换不同型号的产品治具时,可实现快速且精确的定位,减少调试时间;
[0033]
4、快装治具上设置的限位块,能够对工件位置限位,避免因工件位置变动,产生测量误差;同时替代人工检测平面度,更高效、更准确、一致性更高;
[0034]
5、本方案中控制单元在不是对测量值进行直接应用,而是根据快装治具的倾斜状态进行计算,通过换算后对电子设备外壳的测量数据进行修正,从而有效的保证测量的测量数据不会收到夹具安装误差的影响;提高检测精度;
[0035]
6、另外,在快装治具的滑块内设置台阶孔,能够使得伸缩器在伸缩过程中能够具有自适应的特点,从而避免伸缩器压力过大对电子设备的外壳造成破坏。
附图说明
[0036]
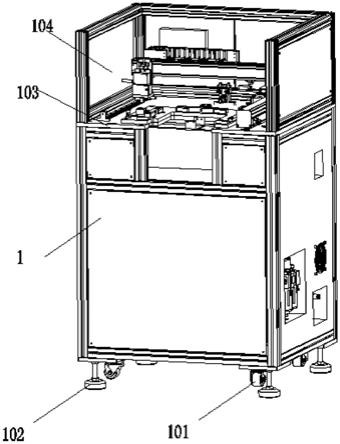
图1为设备整体结构图;
[0037]
图2为设备操作台结构图;
[0038]
图3为图2中局部a的放大图;
[0039]
图4为快装治具结构俯视图;
[0040]
图5为快装治具结构横向剖面图。
[0041]
附图标记:1-机柜,101-滚轮,102-脚杯,103-操作工台,104-围板,2-纵向直线模组,3-激光传感器,4-快装治具,401-第一定位销,402-横向限位块,403-纵向限位块,404-底板,405-第二定位销,406-第一横向滑轨,407-横向弹簧,408-横向气缸,409-第二横向滑轨,410-横向滑块,411-纵向滑块,412-第一纵向滑轨,413-纵向气缸,414-纵向弹簧,415-第二纵向滑轨,416-阶梯孔,417-拉杆,5-到位传感器,6-高度调节器,601-连接台,602-丝杆,603-升降滑台,7-横向直线模组。
具体实施方式
[0042]
实施例1
[0043]
如图1所示,本实用新型公开一种平面度检测设备,用于电子设备外壳平面度检测,包括机柜1、激光传感器3、平面位移机构、快装治具4、控制单元等部件。
[0044]
在所述机柜1的上方具有操作工台103;在操作工台103的前侧和左右两侧分别设置有围栏;在机柜1内设置有气压输出机构,气压输出机构主要是为纵向气缸413和横向气缸408的伸缩进行控制;机柜1的底部设置有多个滚轮101和脚杯102。
[0045]
在操作工台103上的中部位置设置有可拆卸的快装治具4,快装治具4的作用是能够固定电子设备外壳,该快装治具4的主要结构包括了底板404和设置于该底板404上的纵向伸缩机构和横向伸缩机构,纵向伸缩机构和横向伸缩机构配合固定电子设备外壳;底板404面向操作工位的一侧开口并呈倒u字形以利于换装电子设备外壳;快装治具4上的底板404右上角和左下角可以设置第一定位销401和第二定位销405,两个定位销与操作工台103上的定位孔之间的配合定位;在快装治具4下方设置有用于检测电子设备外壳有无的到位传感器415,当到位传感器415当传感器检测到有产品时,会将信号反馈给控制单元,由控制单元启动平面位移机构和激光传感器3开始对产品进行测量。
[0046]
其中,纵向伸缩机构包括纵向气缸413、纵向弹簧414、纵向滑轨、纵向滑块411和纵
向限位块403;纵向滑轨设置在底板404上,纵向滑块411设置于纵向滑轨上并与其滑动配合,纵向气缸413设置于底板404上并连接纵向滑块411,纵向弹簧414抵于纵向滑块411与纵向气缸413之间,纵向纵向限位块403位于纵向滑块411的对侧且两者配合从纵向固定电子设备外壳;纵向气缸413和横向气缸408均属于伸缩器。
[0047]
横向伸缩机构包括横向气缸408、横向弹簧407、横向滑轨、横向滑块410和横向限位块402;横向滑轨设置在底板404上,横向滑块410设置于横向滑轨上并与其滑动配合,横向气缸408设置于底板404上并连接横向滑块410,横向弹簧407抵于横向滑块410与横向气缸408之间,横向限位块402位于横向滑块410的对侧且两者配合从横向固定电子设备外壳。
[0048]
在以上纵向伸缩机构和横向伸缩机构中,横向滑块410或纵向滑块411内设置有阶梯孔416,伸缩器的前端连接有拉杆417,拉杆417穿过限位块的阶梯孔416与伸缩器的轴连接,在伸缩器与滑块之间设置有弹簧;伸缩器的轴伸出到最大行程时,弹簧被压缩且拉杆417的法兰面与阶梯孔416台阶面脱离。
[0049]
控制单元控制通过对气压输出机构的控制,间接控制快装夹具各气缸的伸缩动作。
[0050]
平面位移机构包括纵向直线模组2和横向直线模组607,纵向直线模组2设置于操作工台103上并用于控制激光传感器3的纵向位置,横向直线模组607设置于纵向直线模组2上并用于控制激光传感器3的横向位置,控制单元分别对纵向直线模组2和横向直线模组607进行控制以使激光传感器3到达预定位置。
[0051]
激光传感器3能够检测与电子设备外壳的距离,该激光传感器3设置于所述快装治具4上方并通过高度调节器6连接到纵向直线模组2上,高度调节器6包括连接台601、丝杆602和升降滑台603等部件,升降滑台603与连接台601滑动配合,丝杆602设置于连接台601上并与升降滑台603螺纹配合,激光传感器3设置于连接台601上并与其同步升降,连接台601与纵向直线模组2连接并纵向直线模组2控制移动,在丝杆602上可以设置刻度从而保证激光传感器位置的精确调节;激光传感器3能够在平面位移机构的控制下沿平面轨迹中的移动,该平面轨迹覆盖电子设备外壳所在区域的正上方并且超出电子设备外壳所在的区域外。
[0052]
实施例2
[0053]
由于快装治具4在更换或使用过程中,很可能发生快装治具4所在平面与激光传感器3移动的平面轨迹倾斜,为了在不使用人工调整的条件下解决这一问题,本方案提供离开以下其检测方法,该检测方法包括以下步骤:
[0054]
s1:以待测电子设备外壳的长边为x轴方向、短边为y轴方向、设定点为零点建立坐标系;
[0055]
s2:在底板404上选取两个y轴坐标相同的测试点,记录两个测试点的x轴坐标x1和x2;读取激光传感器3在两个测试点上所得到的高度数据z1和z2;建立修正参数α:
[0056]
α=(z
2-z1)/(x
2-x1);
[0057]
s3:控制单元根据修正参数α对在所测数据的x轴方向参数进行修正,修正后的高度值为:
[0058]
h
修正
=h
测量点-α(x
测量点-x1)
[0059]
h测量点为测量点的高度数据;
[0060]
x测量点为测量点的x轴坐标;
[0061]
s4:根据步骤s2和s3中的修正原理对y轴方向的测量数据进行修正;
[0062]
s5:检测时,选取待测零件的同一轴(x轴或y轴)上的n个点进行高度数据测量后,取极值差异,用以表达待测零件的变形度δ:
[0063]
δ=h
修正max-h
修正min
[0064]
对快装治具4的倾斜状态进行计算,通过换算后对电子设备外壳的测量数据进行修正,从而有效的保证测量的测量数据不会受到夹具安装误差的影响;提高检测精度。
[0065]
上述实施例仅仅是为了清楚的说明所做的举例,而并非对实施方式的限定。对于所属领域的技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1