车载激光雷达自动耦合设备的制作方法
[0001]
本实用新型涉及一种车载激光雷达自动耦合设备。
背景技术:
[0002]
现有的载激光雷达自动耦合设备采用半自动测试的生产流程:软件控制电机在标定测试位置进行测试,根据测试结果手动调节棱镜角度,校准后进行uv固化,然而这样的生产流程存在以下缺点:半自动测试中手动调节棱镜角度效率慢、无精度、易污染,容易造成已经点胶未通过测试的产品,需要再拿下来进行清洁,更加降低产能,并且若固化后的产品测试不通过,只能弃掉产品,浪费物料,增加产出成本,在一公开号为cn210488219u的中国专利中,其公开了一种棱镜调试装置,其包括位置调节组件和校准组件;位置调节组件用于夹持棱镜,并调节棱镜的位置;校准组件发出的光线经棱镜处理返回校准组件;校准组件用于监测棱镜处理后的图像,显然该专利存在校准精度不高的状况。因此目前需要研发出一种能够自动耦合、生产效率高及耦合精度高的车载激光雷达自动耦合设备。
技术实现要素:
[0003]
本实用新型所要解决的技术问题是克服现有技术的不足,提供了一种能够自动耦合、生产效率高及耦合精度高的车载激光雷达自动耦合设备。
[0004]
本实用新型所采用的技术方案是:本实用新型包括机台,所述机台上设置有棱镜上料模组、第一x轴直线运动模组、测试模组及第一相机模组,所述棱镜上料模组上设置有测试台及若干个棱镜放置工位,所述第一x轴直线运动模组上设置有第一旋转机构,所述第一旋转机构上设置有六轴机构,所述六轴机构上设置有第一夹爪,所述棱镜放置工位及所述测试台均与所述第一夹爪相配合,所述测试模组与所述测试台相配合。
[0005]
进一步,所述测试模组包括第二x轴直线运动模组,所述第二x轴直线运动模组上设置有第一y轴直线运动模组,所述第一y轴直线运动模组上配合设置有第二旋转机构,所述第二旋转机构上设置有第二相机模组及光点接收玻璃板,所述第二相机模组与所述光点接收玻璃板的一侧相配合,所述光点接收玻璃板的另一侧与所述测试台相配合。
[0006]
进一步,所述测试模组还包括第一z轴直线运动模组,所述第一z轴直线运动模组上配合设置有光束质量分析仪,所述光束质量分析仪与所述光点接收玻璃板相配合。
[0007]
进一步,所述棱镜上料模组包括第二y轴直线运动模组、第三y轴直线运动模组及第三x轴直线运动模组,所述第二y轴直线运动模组上配合设置有托盘,所述第三y轴直线运动模组上设置有第一移动板,所述测试台及若干个所述棱镜放置工位均设置在所述第一移动板上,所述第三x轴直线运动模组上设置有第二z轴直线运动模组,所述第二z轴直线运动模组上设置有第二夹爪,所述棱镜放置工位及所述托盘均与所述第二夹爪相配合。
[0008]
进一步,所述棱镜上料模组还包括等离子清洗机构及第三相机模组,所述等离子清洗机构及所述第三相机模组均设置在所述第二z轴直线运动模组上。
[0009]
进一步,所述第一相机模组包括相机支撑架,所述相机支撑架上设置有相机组件,
所述相机组件通过锁紧件固定在所述相机支撑架上。
[0010]
进一步,所述六轴机构上还设置有点胶机构及固化机构,所述点胶机构及所述固化机构均与所述测试台相配合。
[0011]
本实用新型的有益效果是:相对于现有技术的不足,在本实用新型中,耦合时,所述第一相机模组对所述测试台上的产品进行拍照并定位,进一步所述棱镜上料模组将棱镜移动到所述棱镜放置工位上,进一步所述第一夹爪将所述棱镜放置工位上的棱镜移动到所述测试台上的产品上,进一步所述测试台的光线投射到棱镜上,进一步所述测试模组根据棱镜投射的光线进行确认,同时通过所述六轴机构及所述第一夹爪调整棱镜,耦合后下料,因此,通过所述棱镜上料模组、所述第一x轴直线运动模组、所述第一旋转机构、所述六轴机构、所述第一夹爪、所述测试台及所述测试模组的设置使得本实用新型能够自动将棱镜耦合在产品上,使得本实用新型具有能够自动耦合、生产效率高及耦合精度高的优点,所以,使得本实用新型具有能够自动耦合、生产效率高及耦合精度高的优点。
附图说明
[0012]
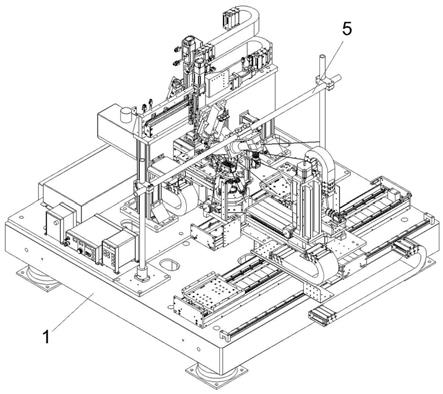
图1是本实用新型的立体结构示意图;
[0013]
图2是本实用新型另一视角的立体结构示意图;
[0014]
图3是图2的a部分的局部放大示意图;
[0015]
图4是本实用新型去除第一相机模组及第二夹爪时的立体结构示意图;
[0016]
图5是本实用新型的平面结构示意图;
[0017]
图6是本实用新型去除棱镜上料模组时第一视角下的立体结构示意图;
[0018]
图7是本实用新型去除棱镜上料模组时第二视角下的立体结构示意图;
[0019]
图8是本实用新型去除棱镜上料模组时第三视角下的立体结构示意图;
[0020]
图9是图8的b部分的局部放大示意图。
具体实施方式
[0021]
如图1至图9所示,在本实施例中,本实用新型包括机台1,所述机台1上设置有棱镜上料模组2、第一x轴直线运动模组3、测试模组4及第一相机模组5,所述棱镜上料模组2上设置有测试台6及若干个棱镜放置工位7,所述第一x轴直线运动模组3上设置有第一旋转机构8,所述第一旋转机构8上设置有六轴机构9,所述六轴机构9上设置有第一夹爪10,所述棱镜放置工位7及所述测试台6均与所述第一夹爪10相配合,所述测试模组4与所述测试台6相配合。相对于现有技术的不足,在本实用新型中,所述第一相机模组5配置于对所述测试台6上的产品进行拍照并定位,所述棱镜放置工位7配置于放置待耦合的棱镜,所述棱镜上料模组2配置于将棱镜进行上料到所述棱镜放置工位7上,所述第一x轴直线运动模组3、所述第一旋转机构8及所述六轴机构9配置于调整所述第一夹爪10的位置,所述第一夹爪10配置于将所述棱镜放置工位7上的棱镜移动到所述测试台6上的产品上,所述测试台6配置于投射光线到棱镜上,所述测试台6配置于对所述测试台6上的产品及棱镜进行自动耦合,耦合时,所述第一相机模组5对所述测试台6上的产品进行拍照并定位,进一步所述棱镜上料模组2将棱镜移动到所述棱镜放置工位7上,进一步所述第一夹爪10将所述棱镜放置工位7上的棱镜移动到所述测试台6上的产品上,进一步所述测试台6的光线投射到棱镜上,进一步所述测
试模组4根据棱镜投射的光线进行确认,同时通过所述六轴机构9及所述第一夹爪10调整棱镜,耦合后下料,因此,通过所述棱镜上料模组2、所述第一x轴直线运动模组3、所述第一旋转机构8、所述六轴机构9、所述第一夹爪10、所述测试台6及所述测试模组4的设置使得本实用新型能够自动将棱镜耦合在产品上,使得本实用新型具有能够自动耦合、生产效率高及耦合精度高的优点。
[0022]
在本实施例中,所所述测试模组4包括第二x轴直线运动模组11,所述第二x轴直线运动模组11上设置有第一y轴直线运动模组12,所述第一y轴直线运动模组12上配合设置有第二旋转机构13,所述第二旋转机构13上设置有第二相机模组14及光点接收玻璃板15,所述第二相机模组14与所述光点接收玻璃板15的一侧相配合,所述光点接收玻璃板15的另一侧与所述测试台6相配合。耦合时,所述测试台6的光线投射到棱镜上,进一步所述第二x轴直线运动模组11及所述第一y轴直线运动模组12带动所述第二旋转机构13、所述第二相机模组14及所述光点接收玻璃板15移动到相应位置,进一步通过所述第二旋转机构13对所述第二相机模组14及所述光点接收玻璃板15进行旋转,从而根据棱镜投射的光线旋转找准光点位置,此时所述光点接收玻璃板15接收光线而形成光点,通过所述第二相机模组14拍照确认,从而完成自动耦合。
[0023]
在本实施例中,所述测试模组4还包括第一z轴直线运动模组16,所述第一z轴直线运动模组16上配合设置有光束质量分析仪17,所述光束质量分析仪17与所述光点接收玻璃板15相配合。所述光束质量分析仪17配置于对光线进行检测计算,根据光线在所述光点接收玻璃板15上形成的光点及在所述第二相机模组14接收的光点进行计算,确认完好则产品下料,因此,本实用新型首先通过所述第二相机模组14及所述光点接收玻璃板15对棱镜进行初定位,同时通过所述六轴机构9及所述第一夹爪10调整棱镜的角度,并进一步通过所述光束质量分析仪17进行精定位,从而完成自动耦合,使得本实用新型具有耦合精度高的优点。
[0024]
在本实施例中,所述棱镜上料模组2包括第二y轴直线运动模组18、第三y轴直线运动模组19及第三x轴直线运动模组20,所述第二y轴直线运动模组18上配合设置有托盘21,所述第三y轴直线运动模组19上设置有第一移动板22,所述测试台6及若干个所述棱镜放置工位7均设置在所述第一移动板22上,所述第三x轴直线运动模组20上设置有第二z轴直线运动模组23,所述第二z轴直线运动模组23上设置有第二夹爪24,所述棱镜放置工位7及所述托盘21均与所述第二夹爪24相配合。上料时,棱镜放置在所述托盘21上,进一步通过所述第二y轴直线运动模组18将所述托盘21移动到所述第二y轴直线运动模组18的末端,进一步所述第一移动板22通过所述第三y轴直线运动模组19移动到相应位置,进一步使得所述第二夹爪24能够将所述托盘21上的棱镜移动到所述第一移动板22上的所述棱镜放置工位7上,进一步所述第三y轴直线运动模组19带动所述棱镜放置工位7移动到所述第三y轴直线运动模组19的末端,从而使得所述第一夹爪10能够抓取所述棱镜放置工位7上的棱镜。
[0025]
在本实施例中,所述棱镜上料模组2还包括等离子清洗机构25及第三相机模组26,所述等离子清洗机构25及所述第三相机模组26均设置在所述第二z轴直线运动模组23上。所述第三相机模组26配置于对所述棱镜放置工位7上的棱镜进行拍照定位,所述等离子清洗机构25配置于对所述棱镜放置工位7上的棱镜进行等离子清洗。
[0026]
在本实施例中,所述第一相机模组5包括相机支撑架27,所述相机支撑架27上设置
有相机组件28,所述相机组件28通过锁紧件29固定在所述相机支撑架27上。所述相机组件28能够调整其位于所述相机支撑架27上的位置,并通过所述锁紧件29将所述相机组件28锁紧在所述相机支撑架27上。
[0027]
在本实施例中,所述六轴机构9上还设置有点胶机构30及固化机构31,所述点胶机构30及所述固化机构31均与所述测试台6相配合。所述点胶机构30配置于对所述测试台6上产品进行点胶,所述固化机构31配置于对胶进行固化。
[0028]
本实用新型的自动耦合流程如下:
[0029]
将待装棱镜放置在所述托盘21上,进一步通过所述第二y轴直线运动模组18将所述托盘21移动到所述第二y轴直线运动模组18的末端,进一步所述第一移动板22通过所述第三y轴直线运动模组19移动到相应位置,进一步使得所述第二夹爪24能够将所述托盘21上的棱镜移动到所述第一移动板22上的所述棱镜放置工位7上,进一步所述第三相机模组26对所述棱镜放置工位7上的棱镜进行拍照定位,进一步所述等离子清洗机构25对所述棱镜放置工位7上的棱镜进行等离子清洗,进一步所述第三y轴直线运动模组19带动所述棱镜放置工位7移动到所述第三y轴直线运动模组19的末端,从而使得所述第一夹爪10能够抓取所述棱镜放置工位7上的棱镜,所述第一相机模组5对所述测试台6上的产品进行拍照并定位,进一步所述点胶机构30对所述测试台6上的产品进行点胶,进一步所述第一夹爪10将棱镜移动到所述测试台6的产品上进行耦合,耦合过程中,所述测试台6的光线投射到棱镜上,进一步所述第二x轴直线运动模组11及所述第一y轴直线运动模组12带动所述第二旋转机构13、所述第二相机模组14及所述光点接收玻璃板15移动到相应位置,进一步通过所述第二旋转机构13对所述第二相机模组14及所述光点接收玻璃板15进行旋转,从而根据棱镜投射的光线旋转找准光点位置,此时所述光点接收玻璃板15接收光线而形成光点,通过所述第二相机模组14拍照确认,从而完成初定位,同时通过所述六轴机构9及所述第一夹爪10调整棱镜的角度,并进一步通过所述光束质量分析仪17进行精定位,从而完成自动耦合。
[0030]
本实用新型应用于车载激光雷达自动耦合设备的技术领域。
[0031]
虽然本实用新型的实施例是以实际方案来描述的,但是并不构成对本实用新型含义的限制,对于本领域的技术人员,根据本说明书对其实施方案的修改及与其他方案的组合都是显而易见的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1