光学测距装置的制作方法
光学测距装置
1.相关申请的交叉引用
2.本技术主张基于2019年3月6日申请的申请号2019-040535号的日本技术的优先权,并通过参照在本技术中并入其公开的全部。
技术领域
3.本公开涉及光学测距装置。
背景技术:
4.在日本特开2016-176750号公报中公开了一种光学测距装置,向对象物发出光,并使用到接受反射光为止的光的飞行时间(tof)来测定到对象物的距离。该光学测距装置使用在盖革模式下进行动作的spad(单光子雪崩二极管),作为光检测器。
5.在这种光检测器中,已知以构成spad的半导体的内部缺陷为起因而产生经时劣化的情况。若经时劣化发展,则与光的受光无关地流动的暗电流增加,可能成为不能够正确地测定距离等故障的重要因素。在车载学测距装置之前的检查阶段等经过校正的试验环境下,能够检查、判定光检测器有无异常。但是,若光学测距装置被车载,则例如在屋外照明环境下,干扰光等光入射到光检测器。由于该干扰光的入射而产生电流,难以与暗电流区分。因此,存在在车载光学测距装置之后,难以判定光检测器有无异常这样的问题。因此,要求即使在车载光学测距装置之后也能够容易地判定光检测器有无异常的技术。此外,该课题并不限定于由spad构成的情况,在由ccd或者cmos传感器构成的情况下也同样地产生。
技术实现要素:
6.根据本公开的一个方式,提供光学测距装置。该光学测距装置具备:光检测器,输出与接受的光量对应的输出信号;扫描型扫描仪,切换为使外部的光入射到上述光检测器的状态、和不使外部的光入射到上述光检测器的暗状态;以及异常判定器,使用判定阈值和从上述暗状态下的上述光检测器输出的输出信号来判断上述光检测器的劣化状态。根据该方式,由于异常判定器通过扫描型扫描仪切换到暗状态,所以能够在不受到光的影响的状态下判定光检测器有无异常。
附图说明
7.图1是表示车辆和搭载在车辆上的光学测距装置的说明图,
8.图2是表示光学测距装置的概略结构的说明图,
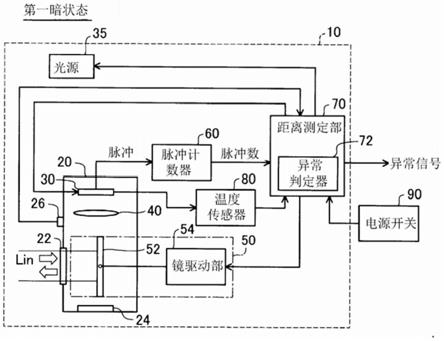
9.图3是表示第一暗状态的说明图,
10.图4是表示第二暗状态的说明图,
11.图5是表示光检测器的动作时间和暗状态的每单位时间的脉冲的数目的说明图,
12.图6是表示温度与判定阈值的关系的说明图,
13.图7是表示光检测器的结构的说明图,
14.图8是在暗状态下异常判定器执行的像素单元有无异常的判断流程图,
15.图9是表示执行图8的流程图的结果的一个例子的说明图,
16.图10是异常判定器执行的是否停止光检测器的判断流程图,
17.图11是表示进行了异常判定的像素单元相邻的情况下的例子的说明图。
具体实施方式
18.·
整体结构:
19.如图1所示,光学测距装置10搭载在车辆100上,测定到对象物200的距离l。具体而言,光学测距装置10使用从向对象物200发出发光光束il开始到接受发光光束il碰上对象物200而返回来的反射光rl为止的时间tof来测定到对象物200的距离l。若将c设为光速,则l=c
·
tof/2。
20.如图2所示,光学测距装置10具备壳体20、光检测器30、光源35、聚光透镜40、扫描型扫描仪50、脉冲计数器60、距离测定部70以及温度传感器80。壳体20是收纳光检测器30的壳体,具备窗22、无反射材料24以及光传感器26。扫描型扫描仪50具备反射镜52和镜驱动部54。距离测定部70具备异常判定器72。
21.壳体20在内部收纳光检测器30、聚光透镜40、反射镜52以及无反射材料24。壳体20具有窗22以外不开口的结构,光仅从窗22入射到内部。反射镜52将从窗22入射的光亦即反射光rl向光检测器30的方向反射。聚光透镜40配置在光检测器30与反射镜52之间,使被反射镜52反射的反射光rl会聚到光检测器30。光检测器30例如由spad(单光子雪崩二极管)形成,根据接受的反射光rl的光量产生脉冲。脉冲计数器60对该脉冲的数目进行计数。距离测定部70使用该脉冲的数目来计算到对象物200的距离。具体而言,创建每个小时的脉冲的数目的直方图,将从光源35发出发光光束il开始到在直方图中产生峰值时为止的时间设为tof,使用该tof计算到对象物200的距离。此外,虽然在本实施方式中,使光源35与光检测器30不同轴,但也可以使它们为同轴。在同轴的情况下,光源35收纳在壳体20的内部。
22.·
第一实施方式:
23.spad即使不照到光也产生脉冲或暗电流。例如由于以构成spad的半导体的内部缺陷为起因的spad的经时劣化而产生该脉冲或暗电流。即,若spad进一步劣化,则脉冲的数目或暗电流增加。因而,通过产生使光不照到spad的暗状态,并测定暗状态下的脉冲的数目或暗电流,能够判断spad、即光检测器30劣化到何种程度。
24.反射镜52由镜驱动部54驱动并旋转。因此,如图3所示,镜驱动部54通过使反射镜52旋转并使入射光lin向窗22的方向反射,能够创造入射光lin不入射到光检测器30的暗状态。将该状态称为“第一暗状态”。入射光lin是太阳光,或者来自其它光源的光直接或者被其它物体反射而入射的光。在光源35发出发光光束il的情况下,也包含该反射光rl。因此,优选异常判定器72不使光源35发光。这是因为这样一来在入射光lin中没有添加反射光rl。但是,异常判定器72也可以使光源35发光。这是因为反射光rl被反射镜52反射,难以入射到光检测器30。
25.另外,如图4所示,镜驱动部54通过使反射镜52旋转并使入射光lin向无反射材料24的方向反射,能够创造入射光lin不入射到光检测器30的暗状态。无反射材料24吸收被反射镜52反射的入射光lin而不再反射。将该状态称为“第二暗状态”。
26.图2~图4所示的异常判定器72判断在第一暗状态或者第二暗状态那样的暗状态下每单位时间产生的脉冲的数目是否是判定阈值m以上。若光检测器30劣化,则暗状态下的每单位时间的脉冲的数目增加。若动作时间增加,则光检测器30可能劣化。因此,如图5所示,若光检测器30的动作时间增加,则暗状态下的每单位时间的脉冲的数目增加。每单位时间的脉冲的数目超过判定阈值时是光检知器30的异常产生时。此外,实际上,脉冲的数目并不是相对于光检测器30的动作时间直线地增加。图5所示的图表并不是对实际的动作时间和脉冲的数目进行图表化的图,而是为了容易理解,成为脉冲的数目相对于动作时间直线地增加那样的图表。
27.当异常判定器72使用脉冲的数目和判定阈值进行判断的结果是判断为光检测器30产生异常时,输出异常信号。该异常信号例如可以显示于车辆100的仪表板,或者也可以通过声音输出。
28.以上,根据第一实施方式,异常判定器72通过使用扫描型扫描仪50切换到不使外部的光入射到光检测器30的暗状态,并使用判定阈值和暗状态下的每单位时间的脉冲的数目,能够容易地判断光检测器30的劣化状态。
29.在上述第一实施方式中,使用spad作为光检测器30,异常判定器72使用从暗状态下的光检测器30输出的输出信号亦即脉冲的数目来判断光检测器30的异常或者劣化状态,但也可以使用ccd、mos传感器、光电晶体管等作为光检测器30。该情况下,也可以使用暗电流来代替脉冲的数目。此外,这些效果在后述的其它实施方式中也是同样的。
30.·
第二实施方式:
31.第二实施方式是能够根据检测器30的温度变更判定阈值m的实施方式。图2~图4所示的温度传感器80测定光检测器30的温度。若光检测器30的温度变高,则脉冲的数目或暗电流增加。因此,是因为,即使光检测器30没有劣化,在温度较高的情况下,脉冲的数目或暗电流也增加,有可能误判断为劣化。因此,如图6所示,异常判定器72也可以能够以光检测器30的温度越高则判定阈值m越大的方式变更判定阈值。此外,在本实施方式中,虽然采用温度传感器80测定光检测器30的温度的结构,但也可以代替温度传感器80而使用测定外部气温的外部气温传感器。这是因为特别是在车辆100的启动时,认为外部气温与光检测器30的温度几乎相同。此外,也可以构成为,不设置温度传感器80,并且异常判定器72不变更判定阈值m。另外,也可以根据温度修正测定值,来代替变更判定阈值m。
32.·
第三实施方式:
33.第三实施方式是根据壳体20的外部的光的强度,判断是否切换到暗状态,或者变更判定值m的实施方式。图2~图4所示的光传感器26设置于与设置有窗22的面相同的面,检知光的强度。光传感器26检知的光与从外部入射到壳体20的内部的光的强度几乎相等。在壳体20的外部的光的强度比判定值弱的情况下,异常判定器72向暗状态切换,能够判断光检测器30的异常。这是因为在壳体20的外部的光的强度比判定值弱的情况下,即使壳体20的外部的光的一部分由于漫反射而入射到光检测器30,也难以由于该光而流过电流并产生脉冲。此外,异常判定器72也可以构成为根据壳体20的外部的光的强度来变更判定阈值m。即使在壳体20的外部的光的强度不弱的情况下也能够使光检测器30的劣化的判断变得容易。
34.·
第四实施方式:
35.第四实施方式是在启动或者停止光学测距装置10时的至少一方判断光检测器30有无异常的实施方式。图2~图4所示的电源开关90是用于启动或者停止车辆100的电源开关。在电源开关90被接通/断开时,光学测距装置10也同时开启/关闭。在启动车辆100的启动时、停止车辆100的停止时,车辆100未行驶,所以不需要利用光学测距装置10检知物体200。因此,是使光学测距装置10成为暗状态,并由异常判定器72判断光检知器30的劣化的良好定时。另外,车辆100的电源开关90被接通/断开的情况也有入库到车库的情况,有能够降低外部的光的强度而能够容易地判断光检测器30的劣化的情况。另外,在车辆100的电源开关9被接通时,光检测器30的温度与外部气温几乎相同。因此,存在能够在光检测器30的温度稳定的状态下,判断光检知器30的劣化的情况。
36.·
第五实施方式:
37.第五实施方式是光检测器30具备多个像素单元32受光元件34的情况的实施方式。如图7所示,在第五实施方式中,光检测器30具有二维排列的像素单元32,各像素单元32具有n个(n为2以上的整数)受光元件34。
38.异常判定器72使用扫描型扫描仪50切换到不使外部的光入射到光检测器30的暗状态之后,例如按照图8所示的流程图来判定像素单元32的异常。在步骤s10中,异常判定器72将1代入变量i,并将0代入变量sum。变量i是表示光学元件34的编号的变量,变量sum是表示进行了异常判定的光学元件34的数目的变量。
39.在步骤s20中,异常判定器72使用判定阈值和第i个光学元件34的暗状态下的每单位时间的脉冲的数目来判断第i个光学元件34是否产生异常。若产生异常,则异常判定器72将处理移至步骤s30,若未产生异常,则使移至处理步骤s60。
40.在步骤s30中,异常判定器72对变量sum加1。在接下来的步骤s40中,异常判定器72判断变量sum的值是否是判定值m2以上。在变量sum的值为判定值m2以上的情况下,异常判定器72移至步骤s50,并将该像素单元32判定为以上。另一方面,在变量sum的值小于判定值m2的情况下,移至步骤s60。
41.在步骤s60中,异常判定器72对变量i加1。在步骤s70中,异常判定器72判断变量i是否大于像素单元32所包含的受光元件34的数目n。在变量i大于n的情况下,异常判定器72将处理移至步骤s80,判断为该像素单元32是正常的。另一方面,在变量i为n以下的情况下,异常判定器72将处理移至步骤s20。
42.如图9所示,假设对各受光元件34进行了判定。该情况下,在被判断为异常的受光元件34的数目为m个(m是小于n的自然数)以上的情况下,异常判定器72将该具有m个受光元件34的像素单元32判断为异常。此处,优选m设定为能够保证光学测距装置10的测距性能的阈值。
43.以上,根据第五实施方式,在二维排列的像素单元32中,n个受光元件34中的m个(m是小于n的自然数)受光元件34有异常的情况下,异常判定器72能够将该像素单元判断为异常。
44.·
第六实施方式:
45.第六实施方式是在多个像素单元32有异常的情况下、且在该有异常的像素单元32相邻的情况下,使光检测器30停止的实施方式。对图10所示的判断光检测器30的停止的流程图进行说明。在步骤s100中,异常判定器72将1代入变量j。变量j是表示像素单元32的编
号的变量。
46.在步骤s110中,异常判定器72按照图9所说明的流程图来判断第j个像素单元是否有异常。在第j个像素单元有异常的情况下,异常判定器72将处理移至步骤s120,在没有异常的情况下,将处理移至步骤s140。
47.在步骤s120中,异常判定器72针对与第j个像素单元32相邻的像素单元32,判断是否被判断为异常。如图11所示,光检测器30包含u1~u16的像素单元32,依次从u1到u16判断像素单元32有无异常。
48.首先,对被判断为异常的像素单元32在x方向上相邻的情况进行说明。在第j个像素单元32例如为u3的情况下,即使u3的像素单元32被判断为异常,相邻的u4也是未判断是否异常的像素单元32。因此,在第j个像素单元32为u3的情况下,步骤s110为是,步骤s120为否,所以异常判定器72将处理移至步骤s140。另一方面,在第j个像素单元32例如为u4的情况下,u4的像素单元32被判断为异常,相邻的u3已经被判断为异常。因此,在第j个像素单元32为u4的情况下,步骤s110为是,步骤s120也为是,所以异常判定器72将处理移至步骤s130。
49.被判断为异常的像素单元32在y方向上相邻的情况也是同样的。在第j个像素单元32例如为u10的情况下,即使u10的像素单元32被判断为异常,相邻的u14也是未判断是否异常的像素单元32。因此,在第j个像素单元32为u10的情况下,步骤s110为是,步骤s120为否,所以异常判定器72将处理移至步骤s140。另一方面,在第j个像素单元32例如为u14的情况下,u14的像素单元32被判断为异常,相邻的u10已经被被判断为异常。因此,在第j个像素单元32为u14的情况下,步骤s110为是,步骤s120也为是,所以异常判定器72将处理移至步骤s130,停止光检测器30,并报告该情况。这是因为在相邻的像素单元32有异常的情况下,有可能不能够检测较小的物体。但是,异常判定器72也可以仅限于报告异常,而不使光检测器30停止。另外,不仅x方向、y方向,还在相对于x、y方向45度的方向上相邻的情况等以特定的图案产生的情况下,异常判定器72也可以使光检测器30停止。
50.在步骤s140中,异常判定器72对变量j加1。在步骤s150中,异常判定器72判断是否对所有像素单元32有无异常进行了判断,在未对所有像素单元32有无异常进行判断的情况下,移至步骤s110,在对所有像素单元32有无异常进行了判断的情况下,结束处理。
51.以上,根据第六实施方式,在n个受光元件中的m个受光元件产生异常时,将该像素单元32判断为异常,所以能够抑制由噪声等所引起的像素单元32的异常判定。另外,在像素单元32的异常以特定的图案产生的情况下,使光检测器30停止,所以在有可能不能够检测较小的物体的情况下,能够使光检测器30停止,并对该情况给出警告。
52.在上述实施方式中,在像素单元32有异常时,也对相邻的像素单元32判断是否有异常,但也可以检查所有像素单元32有无异常并记录于存储装置,之后判断相邻的像素单元32彼此是否有异常。但是,如果按照图10所示的流程图,在像素单元32有异常的情况下,能够在检查所有像素单元32之前,使光检测器30停止,能够缩短检查时间。
53.也可以在隔开时间执行检查的情况下,对于在过去的检查、判断时被判断为异常的像素单元,记录于存储装置,并在本次的检查、判断中视为异常而省略检查、判断。这是因为一旦被判断为异常的像素单元32劣化的可能性较高。
54.在上述各实施方式中,异常判定器72使用判定阈值和暗状态下的每单位时间的脉
冲的数目来判断光检测器30有无异常,但也可以使用暗状态下的光检测器30的暗电流来判断光检测器30有无异常。
55.本公开并不限定于上述的实施方式,能够在不脱离其主旨的范围内通过各种结构实现。例如,发明内容一栏所记载的各方式中的技术特征所对应的实施方式的技术特征能够适当地进行替换、组合,以用来解决上述的课题的一部分或者全部,或者用来达到上述的效果的一部分或者全部。另外,若该技术特征不是作为本说明书中必需的特征进行说明的,则能够适当地删除。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1