一种基于点云抗差自适应的建构筑物垂直度检测方法与流程
1.本发明涉及建构筑物垂直度检测技术领域,具体涉及一种基于点云抗差自适应的建构筑物垂直度检测方法。
背景技术:
2.近年来,我国的大型基础设施建设飞速发展,一些高耸的、大型的建构筑物如广州塔、港珠澳跨海大桥、北京大兴机场等不断落成。在这些基建竣工初期,需要对其进行结构检测,确保其能正常投入使用;同时,定期对其进行变形监测以及安全维护是其能够安全、长久运营的重要保障。对建构筑物常用的结构检测及变形监测内容包括:平整度检测、垂直度(倾斜度)检测以及平面位移监测、沉降监测等,其中垂直度反映了建构筑物的倾斜程度,无论是在建筑竣工初期还是后期维护过程中,均是需要关注的重要指标,比如,《混凝土结构工程施工质量验收规范》要求:现浇结构混凝土的垂直度需控制在0.1%h内,且不应大于30mm;《公路工程质量检验评定标准》中要求:桥墩垂直度限制偏差在0.3%h以内,且不应大于20mm。其中,h表示建构筑物的高度。
3.传统的建构筑物垂直度检测方法有吊锤线法、激光铅垂仪法、全站仪测量法,其中吊锤线法简单方便,但受外界风力、场地条件影响较大,精度也较低。激光铅垂仪投测法快捷、直观,是一种针对高层建筑物垂直度检测的方法,但对场地有一定的要求,具有一定局限性。全站仪测量法是目前最常用的方法,即根据建构筑物的自身形状,选择相互垂直的两个面作为基准面,测量不同高度下测站到立柱中心线的水平距离差作为其中一个基准面的偏移量,除以高差便得到一个基准面的垂直度,通过计算两个基准面的垂直度均方根作为该建构筑物的垂直度。该方法虽然操作简单,计算方便,但仅仅是对建构筑物的某几个点或某些部位进行测量来检测垂直度,存在较大的偶然性和误差,且不适应于上下不等宽的建构筑物垂直度检测。
4.综上所述,传统的建构筑物垂直度检测方法具有各自的局限性,受场景的影响较大,无法精确检测形状不规则建构筑物的垂直度。
技术实现要素:
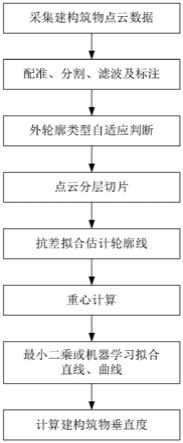
5.针对现有技术存在的不足,本发明提出一种基于点云抗差自适应的建构筑物垂直度检测方法,通过三维激光扫描技术扫描建构筑物外轮廓,使用点云配准技术将其拼接成一个整体,然后以不同高度的水平截面对其进行切片;通过判断轮廓的形状自适应选择数据处理的流程,然后通过抗差拟合估计拟合相应的建构筑物整体或部分外轮廓形状,通过获取的外轮廓形状选择不同策略对其进行重心估计;然后将不同高度的重心点通过最小二乘估计或者机器学习拟合成直线或者曲线,;以克服传统的建构筑物垂直度检测方法的局限性,对建构筑物垂直度的计算更加精确,受场景的影响小。
6.本发明采用的技术方案是,一种基于点云抗差自适应的建构筑物垂直度检测方法;
7.在第一种可实现方式中,包括以下步骤:
8.采集建构筑物的点云数据;
9.将点云数据进行预处理,得到预处理后的建构筑物点云;
10.对预处理后的建构筑物点云外轮廓类型进行自适应判断,确定建构筑物类型;
11.对预处理后的建构筑物点云进行分层切片;
12.对切片的建构筑物点云进行平面投影,得到建构筑物的外轮廓;
13.结合建构筑物类型,按照不同方式对建构筑物的外轮廓进行抗差拟合估计;
14.根据抗差拟合估计结果计算建构筑物不同高度的重心坐标;
15.根据建构筑物不同高度的重心坐标计算建构筑物的垂直度。
16.结合第一种可实现方式,在第二种可实现方式中,
17.预处理包括配准、分割、滤波及标注。
18.结合第一种可实现方式,在第三种可实现方式中,对预处理后的建构筑物点云外轮廓类型进行自适应判断,具体按以下步骤进行:
19.s31、将预处理后的所有建构筑物点云按预设格式读入计算机内存中,并以标注号区分不同的建构筑物;
20.s32、对每个建构筑物点云,搜索查询其高度值的最大值,以及最小值,计算切片高度,选取切片高度为第一特征量的点投影到xoy平面,并设置像素大小,将点云转换为平面二值图像;
21.s33、将平面二值图像依次进行hough变换圆检测、直线检测,根据检测结果进行自适应判断。
22.结合第三种可实现方式,在第四种可实现方式中,建构筑物类型包括棱柱形建构筑物、不完整棱柱形建构筑物、圆柱形建构筑物。
23.结合第四种可实现方式,在第五种可实现方式中,对于棱柱形建构筑物,按以下步骤计算不同高度的重心坐标:
24.s41、对预处理后的建构筑物点云进行分层切片;
25.s42、对切片的建构筑物点云进行平面投影,得到建构筑物的外轮廓;
26.s431
‑
a、对棱柱形建构筑物的外轮廓进行抗差拟合估计,得到直线点集;
27.s432
‑
a、根据直线点集提取棱柱形建构筑物的主要边线;
28.s433
‑
a、根据主要边线计算棱柱的各个角点坐标;
29.s434
‑
a、根据角点坐标计算棱柱形建构筑物的重心坐标;
30.s435
‑
a、按照步骤s41~s434
‑
a重复计算多次,直到达到最大高度为止,得到棱柱形建构筑物不同截面高度的重心坐标。
31.结合第四种可实现方式,在第六种可实现方式中,对于不完整棱柱形建构筑物,按以下步骤计算不同高度的重心坐标:
32.s41、对预处理后的建构筑物点云进行分层切片;
33.s42、对切片的建构筑物点云进行平面投影,得到建构筑物的外轮廓;
34.s431
‑
b、对不完整棱柱形建构筑物的外轮廓进行抗差拟合估计,得到直线点集;
35.s432
‑
b、根据直线点集提取不完整棱柱形建构筑物的两条相互垂直的主要边线;
36.s433
‑
b、遍历不完整棱柱形建构筑物的两条相互垂直的主要边线中的每个点,根
据这些点的曲率变化提取出角点;
37.s434
‑
b、根据角点投影计算两条相互垂直的主要边线的中点坐标;
38.s435
‑
b、根据中点坐标获取不完整棱柱形建构筑物的重心坐标;
39.s436
‑
b、按照步骤s41~s435
‑
b重复计算多次,直到达到最大高度为止,得到不完整棱柱形建构筑物不同截面高度的重心坐标。
40.结合第四种可实现方式,在第七种可实现方式中,对于圆柱形建构筑物,按以下步骤计算不同高度的重心坐标:
41.s41、对预处理后的建构筑物点云进行分层切片;
42.s42、对切片的建构筑物点云进行平面投影,得到建构筑物的外轮廓;
43.s431
‑
c、对圆柱形建构筑物的外轮廓进行抗差拟合估计得到拟合圆心,得到圆柱形建构筑物重心坐标;
44.s432
‑
c、按照步骤s41~s432
‑
c重复计算多次,直到达到最大高度为止,得到圆柱形建构筑物不同截面高度的重心坐标。
45.结合第一种可实现方式,在第八种可实现方式中,根据建构筑物不同高度的重心坐标计算建构筑物的垂直度,具体按照以下步骤进行:
46.将不同高度下建构筑物重心点坐标数据按最小二乘估计或者机器学习拟合直线或曲线;
47.通过直线或者曲线计算建构筑物的垂直度。
48.由上述技术方案可知,本发明的有益技术效果如下:
49.根据建构筑物轮廓形状自适应进行自动化处理,不仅适用于规则的棱柱形、圆柱形建构筑物,也适用于不规整、无明显角特征的棱柱形、圆柱形以及上下不等宽建构筑物的垂直度检测,同时适用于对于现场条件受限只能采集两个相互垂直面点云的柱状体,相比现有的测量技术方法,普适性更高。
50.采用抗差拟合估计建构筑物外轮廓的形状,能准确识别轮廓的主要轮廓边线,减少非主要轮廓线以及测量粗差的影响,减小人工对点云过滤的工作量,能较大幅度提高工作效率以及成果的可靠性。
51.根据建构筑物结构采用分段切片并拟合求重心的方法计算垂直度,顾及到建构筑物整体;同时考虑到建构筑物不规整以及误差导致的粗差点的影响。
附图说明
52.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
53.图1为本发明实施例的方法流程图;
54.图2为发明实施例的棱柱形建构筑物的重心坐标计算方法流程图;
55.图3为发明实施例的不完整棱柱形建构筑物的重心坐标计算方法流程图;
56.图4为发明实施例的圆柱形建构筑物的重心坐标计算方法流程图。
具体实施方式
57.下面将结合附图对本发明技术方案的实施例进行详细的描述。以下实施例仅用于更加清楚地说明本发明的技术方案,因此只作为示例,而不能以此来限制本发明的保护范围。
58.需要注意的是,除非另有说明,本申请使用的技术术语或者科学术语应当为本发明所属领域技术人员所理解的通常意义。
59.实施例
60.本实施例的技术方案建构筑物垂直度检测方法,适用于形状为棱柱形建构筑物、不完整棱柱形建构筑物、圆柱形建构筑物。如图1所示,具体按照以下步骤进行:
61.s1、采集建构筑物的点云数据。
62.s11、对建构筑物进行扫描时,对三维激光扫描仪的选择不作限定,在具体的实施方式中,优先选择带有圆水准器及水平倾斜补偿的三维激光扫描仪。在扫描之前对三维激光扫描仪进行水平和垂直轴系误差校准,保证测距中误差不大于2mm@100m,点位误差不大于3mm@100m,以获得精确的点云数据采集效果。
63.s12、三维激光扫描仪架设位置不作限定,在具体的实施方式中,优先选择在待测建构筑物四周视野开阔、地面稳定的相对高处,与待测建构筑物间的水平距离不小于一倍待测建构筑物高度。扫描时,测站设置的数量不作限定,在具体的实施方式中,优选的,测站不少于3个,以确保获取待测建构筑物完整的三维点云,同时,在不同测站皆通视的位置摆放2个标靶,作为配准的公共点。若因环境条件(靠墙、靠水)等因素影响不便于设置多个测站,则应获取待测建构筑物2个互不平行的主要面的完整点云。如果进行变形监测,则需要待测建构筑物的绝对坐标,应在待测区域四周设置参考点,参考点分布应均匀,数目不少于4个,坐标可采用全站仪导线测量方法计算得到,并在参考点处摆放好标靶。
64.s13、在进行扫描作业时,使三维激光扫描仪严格整平,并设置扫描密度。扫描密度不作限定,在具体的实施方式中,优先选择扫描点间距小于或等于3mm。除了扫描待测建构筑物外,还应扫描不同测站间的公共部分以及标靶用于配准。在扫描时,激光束相对标靶平面入射角小于或等于45
°
。
65.s2、将点云数据进行预处理,预处理包括配准、分割、滤波及标注,得到预处理后的建构筑物点云。
66.使用计算机点云数据处理软件对扫描的点云数据进行配准。首先以公共标靶点将两两点云初步配准,再以公共部分点云进行精确配准,得到完整的建构筑物点云。在具体的实施方式中,保证整体配准误差小于或等于3mm。若做变形监测需要绝对坐标,则需要将配准后的点云通过已知参考点的坐标转换到绝对坐标系中。若同时扫描了多个建构筑物,则应优先配准好单个建构筑物,再将多个点云块配准在一起形成完整点云,完成坐标转换,并对其进行切片检查,保证其外轮廓点云宽度小于或等于3mm,否则需重新进行配准。
67.在完成配准操作后,先将每一个待测建构筑物的点云从周边环境分割出来,然后分割出待测建构筑物的主体部分点云。
68.对细分出的待测建构筑主体部分点云的体外孤点和环境噪声进行离群点滤波处理,得到去噪后完整的建构筑物点云数据。
69.对处理好的每一个待测建构筑物点云进行标注,并全部合并在一起,形成一个只
包含多个建构筑物主体点云的文件。
70.s3、对预处理后的建构筑物点云外轮廓类型进行自适应判断,确定建构筑物类型。
71.s31、将预处理后的所有建构筑物点云以一定的格式(txt,las,pts等)读入计算机内存中,并以标注号区分不同的建构筑物。
72.s32、对每个建构筑物点云,搜索查询其z值(高度值)的最大值h
max
,以及最小值h
min
,计算切片高度选取切片高度为第一特征量的点投影到xoy平面,并设置像素大小,将点云转换为平面二值图像。在具体的实施方式中,第一特征量为h0=
±
7.5mm处(即切片厚度为1.5cm),像素大小设置为3mm,其中有点云处的像素值为1。
73.s33、因建构筑物的形状可能为棱柱形或圆柱形,所以将平面二值图像进行hough变换圆检测;若检测不到圆则继续进行直线检测,检测到直线数大于等于第二特征量且近似平行线间距大于第三特征量,则说明棱柱结果完整,建构筑物为棱柱形建构筑物。检测到直线数小于第二特征量,或近似平行线间距小于或等于第三特征量,说明棱柱不完整,建构筑物为不完整棱柱形建构筑物。若能检测到圆则说明建构筑物为圆柱形建构筑物。在具体的实施方式中,第二特征量设为4,第三特征量设为0.2m。
74.s4、对预处理后的建构筑物点云进行分层切片;对切片的建构筑物点云进行平面投影,得到建构筑物的外轮廓;结合建构筑物类型,按照不同方式对建构筑物的外轮廓进行抗差拟合估计,根据抗差拟合估计结果计算建构筑物不同高度的重心坐标。
75.s41、对预处理后的建构筑物点云进行分层切片
76.对每个建构筑物点云,搜索查询其z值(高度值)的最大值h
max
,以及最小值h
min
,以步长建立循环,按高度h进行切片。切片高度不作限定,在具体的实施方式中,对每个切片高度h,选取高度为h
±
7.5mm的点(即切片厚度为1.5cm)作为步长进行循环分层切片。
77.s42、对切片的建构筑物点云进行平面投影,得到建构筑物的外轮廓。
78.将每个切片的建构筑物点云投影到z=h的平面上,得到二维平面点云数据集p,二维平面点云数据集p即为建构筑物的外轮廓,z为高度值。一般来说,建构筑物不会是一个规整的棱柱形或圆柱形,其外轮廓线可能会有些许凹凸或无明显角特征,且由于测量误差、表面不平整等,其外轮廓线点云会有一定宽度,直接用最小二乘法拟合直线会不可避免地受到这些粗差的影响,因此需要进行抗差拟合估计。
79.s43、结合建构筑物类型,按照不同方式对建构筑物的外轮廓进行抗差拟合估计,根据抗差拟合估计结果计算建构筑物不同高度的重心坐标。
80.按照步骤s3确定的建构筑物类型,可将建构筑物分为棱柱形建构筑物、不完整棱柱形建构筑物、圆柱形建构筑物。以下对这三种建构筑物的外轮廓抗差拟合估计、不同高度的重心坐标计算方法分别加以说明
81.1、棱柱形建构筑物
82.s431
‑
a、对棱柱形建构筑物的外轮廓进行抗差拟合估计,得到直线点集。
83.在二维平面点云数据集p中随机选取s个点作为某一高度处建构筑物的外轮廓模型内点,拟合直线,计算其余点与该高度处建构筑物的外轮廓模型的误差,根据误差大小判断是否加入点集s中,统计内点数n,利用最小二乘法拟合适合点集s的直线参数并保存。在具体的实施方式中,s的选取数量为大于等于2;当误差小于6mm则认为是内点,加入到点集s
中。在具体的实施方式中,对于棱柱形建构筑物的外轮廓模型为棱柱形模型。
84.重新选择s个点,重复本步骤的上述操作,若内点数n比之前大,则更新直线点集s和直线参数,多次迭代直到直线参数收敛。在具体的实施方式中,迭代到次数优选为10000次,当迭代10000次基本上能取得最佳结果,这样通过抗差拟合估计可以大大削减粗差点对直线拟合的影响。
85.s432
‑
a、根据直线点集提取棱柱形建构筑物的主要边线。
86.将通过抗差拟合估计后的直线点集s从二维平面点云数据集p中移除。此举是为了不影响其他主要边线的拟合。对剩余的二维平面点云继续按步骤s43进行拟合,直至得到建构筑物的全部边线。若建构筑物外轮廓边线因设计、装饰等原因存在凹凸的情况,一个面通过拟合得到多条直线,则需要寻找主要边线,剔除多余边线。对于拟合得到的所有直线,将斜率相近的直线归为一类,计算其中每条直线两端点间的距离值并进行排序,距离值排名为前二位的直线,即为建构筑物的两条主要边线。
87.s433
‑
a、根据主要边线计算棱柱的各个角点坐标。
88.将建构筑物全部主要边线按顺序两两相交计算,得到各个交点坐标,各个交点坐标即为棱柱的各个角点坐标。
89.s434
‑
a、根据角点坐标计算棱柱形建构筑物的重心坐标。
90.根据各个角点坐标,利用多边形重心精确计算公式计算棱柱的重心点坐标,计算公式如下式:
[0091][0092]
在上式中,n表示交点个数,x表示横坐标,y表示纵坐标;x
n+1
=x1,y
n+1
=y1。
[0093]
s435
‑
a、按照步骤s41、步骤s42、步骤a
‑
s43
‑
1~a
‑
s43
‑
4重复计算多次,直到达到最大高度h
max
为止,得到棱柱形建构筑物不同截面高度的重心坐标。
[0094]
2、不完整棱柱形建构筑物
[0095]
s431
‑
b、对不完整棱柱形建构筑物的外轮廓进行抗差拟合估计,得到直线点集。
[0096]
在二维平面点云数据集p中随机选取s个点作为某一高度处建构筑物的外轮廓模型内点,拟合直线,计算其余点与该高度处建构筑物的外轮廓模型的误差,根据误差大小判断是否加入点集s中,统计内点数n,利用最小二乘法拟合适合点集s的直线参数并保存。在具体的实施方式中,s的选取数量为大于等于2;当误差小于6mm则认为是内点,加入到点集s中。在具体的实施方式中,对于不完整棱柱形建构筑物的外轮廓模型为棱柱形模型。
[0097]
重新选择s个点,重复本步骤的上述操作,若内点数n比之前大,则更新直线点集s和直线参数,多次迭代直到直线参数收敛。在具体的实施方式中,迭代到次数优选为10000次,当迭代10000次基本上能取得最佳结果,这样通过抗差拟合估计可以大大削减粗差点对直线拟合的影响。
[0098]
s432
‑
b、根据直线点集提取不完整棱柱形建构筑物的两条相互垂直的主要边线。
[0099]
对于不完整的棱柱形建构筑物,不能通过拟合得到其建构筑物的全部边线,所以在具体的实施方式中,可通过提取出两条相互垂直的主要边线来表征不完整的棱柱形建构
筑物的外轮廓。具体的,将通过抗差拟合估计后的直线点集s从二维平面点云数据集p中移除,对剩余的二维平面点云通过拟合得到多条直线。对于拟合得到的所有直线,根据其斜率的乘积是否为
‑
1来判定这两条直线是否垂直,如果斜率的乘积为
‑
1则表明是两条相互垂直的主要边线。
[0100]
s433
‑
b、遍历不完整棱柱形建构筑物的两条相互垂直的主要边线中的每个点,根据这些点的曲率变化提取出角点。
[0101]
遍历不完整棱柱形建构筑物的外轮廓中的每个点,搜索这些点的邻域范围内小于或等于半径阈值的点,计算该点曲率,根据曲率变化提取出角点。在具体的实施方式中,半径阈值r=0.003m。
[0102]
s434
‑
b、根据角点投影计算两条相互垂直的主要边线的中点坐标。
[0103]
将每个角点投影至距离其最近主要边线上,将每条主要边线上距离最远的两个角点作为其两个端点,根据两个端点计算两条相互垂直的主要边线的中点坐标,中点坐标有两个。
[0104]
s435
‑
b、根据中点坐标获取不完整棱柱形建构筑物的重心坐标。
[0105]
将两个中点沿坐标轴延伸得到交点,交点为棱柱的重心坐标,即为不完整棱柱形建构筑物的重心坐标。
[0106]
s436
‑
b、按照步骤s41、步骤s42、步骤s431
‑
b~s435
‑
b重复计算多次,直到达到最大高度h
max
为止,得到不完整棱柱形建构筑物不同截面高度的重心坐标。
[0107]
3、圆柱形建构筑物
[0108]
s431
‑
c、对圆柱形建构筑物的外轮廓进行抗差拟合估计得到拟合圆心,拟合圆心坐标即为圆柱形建构筑物重心坐标。
[0109]
在二维平面点云数据集p中随机选取s个点作为某一高度处建构筑物的外轮廓模型内点进行拟合,计算其余点与该高度处建构筑物的外轮廓模型的误差,根据误差大小判断是否加入点集s中,统计内点数n,利用最小二乘法拟合适合点集s的参数并保存。在具体的实施方式中,s的选取数量为大于等于2;当误差小于6mm则认为是内点,加入到点集s中。在具体的实施方式中,对于圆柱形建构筑物的外轮廓模型为圆形模型。
[0110]
重新选择s个点,重复本步骤的上述操作,若内点数n比之前大,则更新点集s和参数,多次迭代直到参数收敛。在具体的实施方式中,迭代到次数优选为10000次,当迭代10000次基本上能取得最佳结果,这样通过抗差拟合估计可以大大削减粗差点对拟合的影响。
[0111]
通过本步骤的抗差拟合估计,可以得到拟合圆心,拟合圆心的坐标即为圆柱形建构筑物重心坐标。
[0112]
s432
‑
c、按照步骤s41、步骤s42、步骤s432
‑
c重复计算多次,直到达到最大高度h
max
为止,得到圆柱形建构筑物不同截面高度的重心坐标。
[0113]
s5、根据建构筑物不同高度的重心坐标计算建构筑物的垂直度。
[0114]
垂直度定义为不同高度下同一位置的水平偏移量与高差的比值,因此通过直线或者曲线可计算建构筑物不同高度下的水平偏移量,从而得出建构筑物的垂直度。在具体的实施方式中,将不同高度下建构筑物重心点坐标数据按最小二乘估计或者机器学习拟合直线或曲线,该直线或者曲线表示该建构筑物的倾斜情况;通过直线或者曲线计算建构筑物
的垂直度方式不作限定,以现有技术任意一种可实现的方式进行,比如:通过直线或者曲线计算不同高度下建构筑物的水平偏移量,水平偏移量与高差的比值即为建构筑物的垂直度。
[0115]
通过本实施的技术方案,根据建构筑物轮廓形状自适应进行自动化处理,不仅适用于规则的棱柱形、圆柱形建构筑物,也适用于不规整、无明显角特征的棱柱形、圆柱形以及上下不等宽建构筑物的垂直度检测,同时适用于对于现场条件受限只能采集两个相互垂直面点云的柱状体,相比现有的测量技术方法,普适性更高。
[0116]
采用抗差拟合估计建构筑物外轮廓的形状,能准确识别轮廓的主要轮廓边线,减少非主要轮廓线以及测量粗差的影响,减小人工对点云过滤的工作量,能较大幅度提高工作效率以及成果的可靠性。
[0117]
根据建构筑物结构采用分段切片并拟合求重心的方法计算垂直度,顾及到建构筑物整体;同时考虑到建构筑物不规整以及误差导致的粗差点的影响。
[0118]
最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围,其均应涵盖在本发明的权利要求和说明书的范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1