基于激光条中心线定位提取算法的轮对踏面损伤检测方法
1.本发明涉及铁路交通技术领域,尤其是一种基于激光条中心线定位提取算法的轮对踏面损伤检测方法。
背景技术:
2.伴随着轨道运输总量的日益庞大,轨道运输的高速化、大载荷化成为必然的发展趋势,这对车辆安全状态的检测提出严峻的考验。因此,列车零部件优劣尤其是轮对质量对铁路运输行业的运营安全有着不可忽视的影响。列车具有连续不间断的使用特点,在持续性运行过程中各个部件不可避免得会发生磨损,因此需要及时对列车的部件损伤进行检测,将磨耗超过规定限度的列车零部件进行维修、更换,以此提高列车安全性。
3.轮对承担着整个车体的重量,是列车最重要的部件之一,并由于在列车运行过程中与铁轨持续性接触碰撞,也是列车最易受损的部件,因此对轮对的损伤检测是列车安全检测的重要组成成分。其中,轮对踏面由于长期和铁轨直接接触,不可避免的成为轮对发生损伤的主要部位,因此如何对轮对踏面上的损伤进行快速、准确的检测成为铁路运输行业亟待解决的问题,也是该领域众多科研人员长期致力研究的重要课题,实现轮对踏面损伤的高精度检测尤其是在轨自动检测对我国铁路运输行业的发展将具有重大意义。
4.传统做法是由机车检修工作人员通过肉眼观察或声音识别的方法来进行机车轮对踏面的损伤检测,这种方法检测效率低下、自动化程度低。随着机器视觉检测技术的发展,逐渐会给予图像处理技术来实现机车轮对踏面的无损检测,比如一种做法可能会使用线结构光扫描技术来实现,该技术将线结构光投射在待检测物体表面,通过图像处理技术提取出畸变激光条的二维中心点坐标,再根据线结构光检测系统的结构参数反算出对应的三维坐标,从而获取物体表面的三维点云,继而实现对轮对踏面损伤的无损检测。由于激光条具有一定宽度、存在冗余信息,需提取出单像素宽度的中心线,其提取精度将直接决定后续的系统检测精度,因此如何实现快速、高精度、鲁棒性好的激光条中心线提取算法是线结构光扫描技术的关键。
5.现有激光条中心线提取方法主要可以分为两大类:一是仅考虑激光条灰度值分布特点的传统中心线提取方法,主要有极值法、阈值法、灰度重心法、边缘法和几何中心法等,但上述这些方法提取精度不高且鲁棒性差。二是基于激光条特性(如微分特性和形态特性等)的中心线提取方法,主要有steger方法和方向模板法等,这类方法精度较高且具有一定的抗噪声能力,但提取速度较传统方法仍有一定差距。可见现有的激光条中心线提取方法很难在提取精度和提取速度两方面都表现良好,从而影响了使用线结构光扫描技术来实现轮对踏面损伤检测的效果。
技术实现要素:
6.本发明人针对上述问题及技术需求,提出了一种基于激光条中心线定位提取算法的轮对踏面损伤检测方法,本发明的技术方案如下:
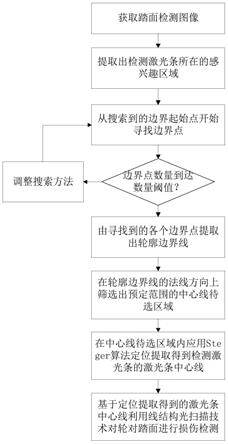
7.一种基于激光条中心线定位提取算法的轮对踏面损伤检测方法,该方法包括:
8.当机车在轨道上行驶的过程中,通过激光器将检测激光条投射在机车的轮对踏面上并通过相机拍摄轮对踏面获取踏面检测图像;
9.利用轮廓跟踪提取算法从踏面检测图像中提取出检测激光条的轮廓边界线,并在轮廓边界线的法线方向上筛选出预定范围的中心线待选区域;
10.在中心线待选区域内应用steger算法定位提取得到检测激光条的激光条中心线;
11.基于定位提取得到的激光条中心线利用线结构光扫描技术对轮对踏面进行损伤检测。
12.其进一步的技术方案为,在轮廓边界线的法线方向上筛选出预定范围的中心线待选区域,包括:
13.对轮廓边界线进行间隔采样得到若干个轮廓边缘点;
14.利用hessian矩阵确定每个轮廓边缘点对应的轮廓法线;
15.基于各个轮廓边缘点对应的轮廓法线筛选出中心线待选区域。
16.其进一步的技术方案为,利用hessian矩阵确定每个轮廓边缘点对应的轮廓法线,包括对于每个轮廓边缘点:
17.求解轮廓边缘点的hessian矩阵的最大特征值的特征向量作为轮廓边缘点对应的法线方向,将轮廓边缘点在对应的法线方向上与轮廓边界线的交点之间的线段作为轮廓边缘点对应的轮廓法线。
18.其进一步的技术方案为,基于各个轮廓边缘点对应的轮廓法线筛选出中心线待选区域,包括:
19.选取各个轮廓边缘点对应的轮廓法线的中间的预定比例宽度的区域,筛选得到中心线待选区域。
20.其进一步的技术方案为,利用轮廓跟踪提取算法从踏面检测图像中提取出检测激光条的轮廓边界线,包括:
21.根据轮对的运动轨迹从踏面检测图像中提取出检测激光条所在的感兴趣区域;
22.按照预定搜索顺序在感兴趣区域内搜索像素点,将搜索到的灰度值达到预定阈值的像素点作为边界起始点;
23.从边界起始点开始利用轮廓跟踪提取算法提取出轮廓边界线。
24.其进一步的技术方案为,轮廓跟踪提取算法基于8连通链码实现,从边界起始点开始利用轮廓跟踪提取算法提取出轮廓边界线,包括:
25.确定第i个边界点的链码值d
i
为第i个边界点在第i
‑
1个边界点的相对方向上的对应链码值;i为参数且i的起始值为1,第0个边界点为边界起始点;
26.若第i个边界点的链码值d
i
为偶数,当d
i
‑
1为非负数时将d
i
‑
1对应的方向作为第i轮搜索的起始方向,当d
i
‑
1为负数时将(d
i
‑
1)+8对应的方向作为第i轮搜索的起始方向;
27.若第i个边界点的链码值d
i
为奇数,当d
i
‑
2为非负数时将d
i
‑
2对应的方向作为第i轮搜索的起始方向,当d
i
‑
2为负数时将(d
i
‑
2)+8对应的方向作为第i轮搜索的起始方向;
28.以第i个边界点为基准点,从确定的第i轮搜索的起始方向开始按照顺时针方向在第i个边界点的8个邻接点中寻找灰度值达到预定阈值的第i+1个边界点;
29.重新执行确定第i个边界点的链码值d
i
为第i个边界点在第i
‑
1个边界点的相对方
向上的对应链码值的步骤,直至第i+1个边界点为边界起始点时提取出轮廓边界线。
30.其进一步的技术方案为,直至第i+1个边界点为边界起始点时提取出轮廓边界线,包括:
31.若提取得到的边界点的数量达到数量阈值,则由寻找到的各个边界点提取出轮廓边界线,否则调整搜索方法重新从边界起始点开始寻找各个边界点。
32.本发明的有益技术效果是:
33.本技术公开了一种基于激光条中心线定位提取算法的轮对踏面损伤检测方法,该算法以轮廓跟踪算法为基础,提取出检测激光条的轮廓边界线以实现感兴趣区域的定位,后在轮廓边界线法线方向上筛选出中心线待选区域,由此大幅减少数据运算量,提升提取速度,最后在中心线待选区域内利用hessian矩阵基于steger算法提取出亚像素精度的中心点,实现对检测激光条的精准提取,克服了现有提取速度过慢、易受杂散光斑干扰等问题,在提取速度和提取精度方面都有较好的表面,从而可以提升轮对踏面损伤检测的速度和精度。
34.实验结果表明,本技术的方法能够实现对激光条中心线的快速提取,耗时仅为现有steger方法的十分之一,且能够有效避免杂散光斑的干扰,实现高精度的中心线提取。
附图说明
35.图1是本技术公开的轮对踏面损伤检测方法的方法流程图。
具体实施方式
36.下面结合附图对本发明的具体实施方式做进一步说明。
37.本技术公开了一种基于激光条中心线定位提取算法的轮对踏面损伤检测方法,请参考图1所示的流程图,该方法包括如下步骤:
38.步骤1,当机车在轨道上行驶的过程中,通过激光器将检测激光条投射在机车的轮对踏面上并通过相机拍摄轮对踏面获取踏面检测图像。
39.在实际应用时,通常利用轮对视觉检测系统来获取踏面检测图像,轮对视觉检测系统主要包括相机和激光器,相机和激光器分别铺设在轨道两侧,激光器将检测激光条投射在轮对踏面上并由相机拍摄得到踏面检测图像,因此获取到的踏面检测图像包括轮对踏面及投射其上的检测激光条,且随着轮对的转动,踏面检测图像会拍摄到轮对踏面的不同部位及投射其上的多条检测激光条。
40.步骤2,利用轮廓跟踪提取算法从踏面检测图像中提取出检测激光条的轮廓边界线。该步骤具体有如下几个子步骤:
41.如上所述,随着轮对的运动,获取到的踏面检测图像中可能包含多条检测激光条,因此首先根据轮对的运动轨迹从踏面检测图像中提取出检测激光条所在的感兴趣区域,随着轮对在轨道中直线运动时,检测激光条投射在轮对踏面的不同部位,不同部位的检测激光条的运动轨迹也是直线且相互平行,因此首先从原始的踏面检测图像中分割出感兴趣区域、该感兴趣区域只覆盖对应的检测激光条所在的图像区域、而不包含其他检测激光条,可以避免其余检测激光条的干扰。另外在此之前,通常还需要先进行去噪、阈值分割等预处理操作。
42.然后按照预定搜索顺序在感兴趣区域内搜索像素点,将搜索到的灰度值达到预定阈值的像素点作为边界起始点,通常可以按照从左上角的像素点开始,自左向右、自上而下的搜索顺序进行搜索。
43.从边界起始点开始利用轮廓跟踪提取算法提取出轮廓边界线。在一个实施例中,轮廓跟踪提取算法基于8连通链码实现,链码常在计算机视觉等领域中被用来表示具有相似灰度特征区域的边缘,它根据邻接点间的相对位置和方向进行编码与赋值,每个基准点的8个不同方向的邻接点按顺序分别具有0~7的链码值,比如基准点的正右方的邻接点的链码值为0,右下45
°
处的邻接点的链码值为1,右下方的邻接点的链码值为2,依次得到各个不同方向的临界点对应的链码值。基于8连通链码提取轮廓边界线的过程如下:
44.(1)将边界起始点作为第0个边界点,搜索的起始方向可以预先定义、比如以正上方作为起始方向,将第0个边界点的8个邻接点中灰度值达到预定阈值的像素点作为第一个边界点。
45.(2)确定第i个边界点的链码值d
i
为第i个边界点在第i
‑
1个边界点的相对方向上的对应链码值,i为参数且i的起始值为1。
46.(3)若第i个边界点的链码值d
i
为偶数,当d
i
‑
1为非负数时将d
i
‑
1对应的方向作为第i轮搜索的起始方向,当d
i
‑
1为负数时将(d
i
‑
1)+8对应的方向作为第i轮搜索的起始方向。
47.若第i个边界点的链码值d
i
为奇数,当d
i
‑
2为非负数时将d
i
‑
2对应的方向作为第i轮搜索的起始方向,当d
i
‑
2为负数时将(d
i
‑
2)+8对应的方向作为第i轮搜索的起始方向;
48.(4)以第i个边界点为基准点,从确定的第i轮搜索的起始方向开始按照顺时针方向在第i个边界点的8个邻接点中寻找灰度值达到预定阈值的第i+1个边界点。
49.(5)重新执行确定第i个边界点的链码值d
i
为第i个边界点在第i
‑
1个边界点的相对方向上的对应链码值的步骤,直至第i+1个边界点为边界起始点时提取出轮廓边界线。
50.另外可选的,若提取得到的边界点的数量达到数量阈值,则由寻找到的各个边界点提取出轮廓边界线,否则调整搜索方法重新从边界起始点开始寻找各个边界点,调整搜索方法比如可以改为从起始方向开始按照逆时针方向搜索等等,这样可以在一定程度上排除杂散光斑的干扰,为后续精准的定位激光条中心线提供基础。
51.步骤3,在轮廓边界线的法线方向上筛选出预定范围的中心线待选区域。该步骤具体的:
52.(1)对轮廓边界线进行间隔采样得到若干个轮廓边缘点,本技术在计算法线方向时采取间隔采样的方法,能够减少轮廓边缘毛刺现象的干扰。
53.(2)利用hessian矩阵确定每个轮廓边缘点对应的轮廓法线。具体的,求解轮廓边缘点的hessian矩阵的最大特征值的特征向量作为轮廓边缘点对应的法线方向,将轮廓边缘点在对应的法线方向上与轮廓边界线的交点之间的线段作为轮廓边缘点对应的轮廓法线。
54.(3)基于各个轮廓边缘点对应的轮廓法线筛选出中心线待选区域。具体的,选取各个轮廓边缘点对应的轮廓法线的中间的预定比例宽度的区域,筛选得到中心线待选区域。比如轮廓边缘点对应的轮廓法线的宽度为l,则选取中间的2l/3宽度作为中心线待选区域,该方法可以大幅减少待处理像素点的数量,从而达到提升激光条中心线提取速度的目的。
55.步骤4,在中心线待选区域内应用steger算法定位提取得到检测激光条的激光条
中心线,具体的:求解中心线待选区域内图像的任意一点(x0,y0)的hessian矩阵可以得到对应的法线方向,假设其法线方向的单位向量为(n
x
,n
y
),求出图像在(x0,y0)处的二阶泰勒展开式,然后求出该二阶泰勒展开式在法线方向(n
x
,n
y
)上的一阶方向导数。设提取得到的亚像素中心点坐标为(p
x
,p
y
)=(x0+tn
x
,y0+tn
y
),其中(tn
x
,tn
y
)为亚像素偏移量,将(p
x
,p
y
)代入一阶方向导数并令其为0得到t,如果满足(tn
x
,tn
y
)∈[
‑
0.5,0.5]
×
[
‑
0.5,0.5],则一阶导数为0的点在当前像素内,(x0,y0)为提取到的像素级的激光条中心线上的坐标,(p
x
,p
y
)为对应的亚像素中心点坐标。由此可以提取出亚像素精度的激光条中心线,实现对激光条中心线的精准提取。
[0056]
步骤5,基于定位提取得到的激光条中心线利用线结构光扫描技术对轮对踏面进行损伤检测。
[0057]
以上所述的仅是本技术的优选实施方式,本发明不限于以上实施例。可以理解,本领域技术人员在不脱离本发明的精神和构思的前提下直接导出或联想到的其他改进和变化,均应认为包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1