一种非连续区域的角球面球心空间位置检测方法与流程
1.本发明涉及工业测量技术领域,具体涉及一种非连续区域的角球面球心空间位置检测方法。
背景技术:
2.异构产品具有多个支角,每个支角表现为一个小角球面,如图1所示,在装配过程中,需对多个角球面形成的球心空间位置进行检测。非完整、小区域测量属于测量领域的难点,是以局部可利用信息来描述全局参数,传统上多采用接触式三坐标测量方法,存在效率较低、易损伤产品表面等情况。
技术实现要素:
3.本发明的目的在于提供一种非连续区域的角球面球心空间位置检测方法,检测过程中不与产品接触,不会对产品表面造成损伤。
4.本发明通过下述技术方案实现:
5.一种非连续区域的角球面球心空间位置检测方法,包括以下步骤:
6.获取角球面目标区域的点云;
7.根据所述点云获取所述角球面的球体轴线空间方程;
8.采用k
‑
means聚类算法对所述点云中各个点对应的端点进行聚类,得到端点的聚类中心;
9.根据所述球体轴线空间方程和所述聚类中心获取所述角球面的球心。
10.考虑到角球面的球心位于球体的轴线上,而角球面上各个点的端点位于球心的周围,因此,在本方案中,首先对角球面的球体轴线进行拟合,得到角球面的球体轴线;其次,对各个点的端点进行聚类,得到各聚类中心,减少数据处理量的同时减小系统误差;最后,计算各聚类中心相对于轴线的空间距离,选取空间距离最小的聚类中心做为待测角球面球心。由于球心位于球体的轴线上,各聚类中心位于球心的周围,因此,通过求取各聚类中心到球体轴线的距离便可以获得角球面的球心。
11.本方案借助高精度线激光轮廓传感器扫描产品表面获取点云信息,通过对点云进行数据处理、算法计算,从而得到全局参数,具有更高的测量效率、测量一致性和准确性,对推进高效测量、数字化测量、智能测量等具有重要意义,在自动化装配、智能装配等行业具有重要应用价值。
12.优选地,获取角球面目标区域的点云包括以下子步骤:
13.在所述角球面目标区域内,用线激光扫描所述角球面,以获取所述点云;
14.对所述点云进行滤波处理,得到滤波后的点云。
15.优选地,根据所述点云获取所述角球面的球体轴线空间方程包括以下子步骤:
16.采用最小二乘法依次对位于同一个平面内的所述点云进行椭圆拟合;其中,所述点云所在的各个平面相互平行;
17.获取每一个平面拟合的椭圆的中心坐标;
18.采用最小二乘法对所述中心坐标进行轴线拟合,得到所述球体轴线空间方程。
19.优选地,采用k
‑
means聚类算法对所述点云中各个点对应的端点进行聚类,得到端点的聚类中心包括以下子步骤:
20.采用主成分分析法获取所述点云中各个点的法向量;
21.根据所述角球面的球半径和各个点的法向量获取对应点的端点;
22.采用k
‑
means聚类算法对端点进行聚类,得到端点的聚类中心。
23.优选地,采用主成分分析法获取所述点云中各个点的法向量包括以下子步骤:
24.获取所述点云的k邻域中任意一点
×
的协方差矩阵;
25.采用奇异值分解方法计算所述协方差矩阵,得到特征向量和对应的特征值;
26.选取对应最小特征值的特征向量作为点p
i
的法向量
27.优选地,所述协方差矩阵为:
[0028][0029][0030]
其中,k表示点p
i
的邻域,表示点p
i
和邻域点形成集合的质心,cov(x)表示邻域点集与质心点的平方距离的和。
[0031]
优选地,所述端点由下式获取:
[0032][0033]
其中,k
i
表示第i个点的端点,p
i
表示第i个点,sr表示角球面的球半径。
[0034]
优选地,采用k
‑
means聚类算法对端点进行聚类,得到端点的聚类中心包括以下子步骤:
[0035]
a.设置聚类数量和聚类评价函数;
[0036]
b.在各类中随机选择一个端点作为各类中心点,并计算余下端点与各类中心点之间的欧式距离,把端点划分至欧氏距离最小的类中;
[0037]
c.根据类中已有的样本点,重新计算类中心;
[0038]
d.重复b
‑
c,直至所述聚类评价函数的值最小。
[0039]
优选地,根据所述球体轴线空间方程和所述端点聚类中心获取所述角球面的球心包括以下子步骤:
[0040]
计算各聚类中心到球体轴线的空间距离;
[0041]
选取空间距离最小的聚类中心作为待测角球面的球心。
[0042]
优选地,各聚类中心到球体轴线的空间距离由下式获取:
[0043]
[0044]
其中,d
i
表示第i个聚类中心到球体轴线的空间距离,(m,n,p)表示球体轴线的方向向量,(x0,y0,z0)表示椭圆中心点的质心坐标,(μ
ix
,μ
iy
,μ
iz
)表示第i个聚类中心的坐标。
[0045]
本发明与现有技术相比,具有如下的优点和有益效果:
[0046]
采用线激光扫描获取角球面的点云信息,即非接触测量,不存在划伤产品表面的风险;
[0047]
测量准确率高,且具有较高的鲁棒性;
[0048]
测量一致性好,可减少人为因素干扰;
[0049]
测量效率高,可实现数字化、自动化测量,大大提高检测效率。
附图说明
[0050]
此处所说明的附图用来提供对本发明实施例的进一步理解,构成本技术的一部分,并不构成对本发明实施例的限定。在附图中:
[0051]
图1为异构产品角球面示意图;
[0052]
图2为本发明获取的角球面目标区域点云示意图;
[0053]
图3为角球面球心位置及球体轴线示意图;
[0054]
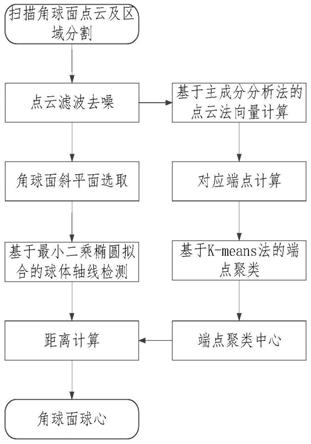
图4为本发明的流程示意图。
具体实施方式
[0055]
为使本发明的目的、技术方案和优点更加清楚明白,下面结合实施例和附图,对本发明作进一步的详细说明,本发明的示意性实施方式及其说明仅用于解释本发明,并不作为对本发明的限定。
[0056]
实施例
[0057]
一种非连续区域的角球面球心空间位置检测方法,如图4所示,包括以下步骤:
[0058]
(1)获取角球面目标区域的点云;
[0059]
用线激光扫描采集角球面目标区域(异构产品上所有的角球面)的点云,如图2所示,考虑到所有角球面提取出来的点云数量庞大,处理起来十分复杂,因此在具体实施时,可以通过设置空间范围对所有的角球面进行区域分割,并从中选择感兴趣的分割区域进行点云提取,从而降低计算量。进一步地,为提高测量精度,对提取的点云进行双边滤波去躁,得到滤波后的点云。其中,双边滤波去躁的基本思想是将三维点云模型表面的噪声依次沿着数据点的法向量方向移动,逐渐调整噪声点的坐标和位置,可表示为:其中n
i
为点p
i
的法向量,为双边滤波权重因子,控制着光顺程度和特征保持程度,以保持点云中的细节特征信息。
[0060]
值得说明的是,感兴趣的分割区域可以根据实际需求进行合理选择,同时,为使得测量结果更为准确,感兴趣的分割区域尽量选择位于角球面中心区域的点云。
[0061]
(2)根据采集的点云获取角球面的球体轴线空间方程;
[0062]
采用最小二乘法依次对位于同一个平面内的点云进行椭圆拟合;点云所在的各个平面相互平行。其中,点云所在的平面可以随机进行选取,为保证拟合的准确性,点云中任意一个点仅存在一个平面内,作为优选地,相邻两个平面相互平行。在本实施例中,假设斜平面与球面相交表现为圆或椭圆,随机选取j个斜平面,对每个斜平面上的点进行最小二乘
椭圆拟合,从而得到对应每个斜平面的椭圆中心。
[0063]
具体的,斜平面上的椭圆方程可以表示为x2+axy+by2+cx+dy+e=0,设斜平面上的点数量为:κ≥5,通过对目标函数的最小值来决定参数(a,b,c,d,e),即令可以得到椭圆中心为通过上述过程,可得j个斜平面对应的椭圆中心点{o1,o2,o3,
…
,o
j
,
…
,o
j
}。
[0064]
对得到的椭圆中心点{o1,o2,o3,
…
,o
j
,
…
,o
j
}进行最小二乘轴线拟合,从而得到球体轴线空间方程其中,(m,n,p)为球体轴线的方向向量,为椭圆中心点的质心p0的坐标,即轴线上一点。
[0065]
(3)采用k
‑
means聚类算法对点云中各个点对应的端点进行聚类,得到端点的聚类中心;
[0066]
①
采用主成分分析法获取点云中各个点的法向量:
[0067]
对点云设置合适的邻域k,并获取邻域k中任意一点p
i
的协方差矩阵,协方差矩阵表示为:表示为:其中,表示点p
i
和邻域点形成集合的质心,cov(x)表示邻域点集与质心点的平方距离的和;采用奇异值分解方法计算协方差矩阵cov(x),得到特征向量γ
i
(i=0,1,2),和对应的特征值e2,e1,e0,其中对应最小特征值的特征向量作为该点的法向量
[0068]
②
由于角球面的球半径事先已知,因此可根据下式获取对应点的端点;
[0069][0070]
其中,sr表示角球面的球半径,为已知量,k
i
表示第i个点的端点,端点k
i
的空间坐标表示为k
i
=(k
ix
,k
iy
,k
iz
),p
i
表示第i个点。
[0071]
③
采用k
‑
means聚类算法对端点进行聚类,得到端点的聚类中心:
[0072]
a.设置聚类数量c,并以端点间的欧氏距离作为类间的相似性度量,以误差平方和函数作为聚类评价函数;
[0073]
其中,d(k
i
,k
j
)表示第i个点k
i
=(k
ix
,k
iy
,k
iz
)到第j个点k
j
=(k
jx
,k
jy
,k
jz
)的距离,μ
i
=(μ
ix
,μ
iy
,μ
iz
)为类c
i
的中心坐标,t表示每个类中的端点;
[0074]
b.在各类中随机选择样本点作为中心点,计算所有样本点与各类中心点之间的欧式距离,然后把各样本点划入欧氏距离最小的类中;
[0075]
c.根据类中已有的样本点,重新计算类中心;
[0076]
d.重复步骤b
‑
c,直至聚类评价函数最小,从而达到终止条件,进而得到所有对应
类的聚类中心{μ1,μ2,μ3,
…
,μ
c
}。
[0077]
(4)根据球体轴线空间方程和聚类中心获取角球面的球心;
[0078]
由下式计算各聚类中心到球体轴线的空间距离
[0079][0080]
其中,d
i
表示第i个聚类中心到球体轴线的空间距离,(m,n,p)表示球体轴线的方向向量,(x0,y0,z0)表示椭圆中心点的质心坐标,(μ
ix
,μ
iy
,μ
iz
)表示第i个聚类中心的坐标;
[0081]
空间距离最小的聚类中心则为待测角球面的球心o,如图3所示。
[0082]
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限定本发明的保护范围,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1