一种非侵入式翼伞操纵绳张力传感器
1.本发明涉及传感器无损测量技术领域,尤其涉及一种非侵入式翼伞操纵绳张力传感器。
背景技术:
2.操纵绳是翼伞系统中用来调节翼伞飞行速度和飞行方向的控制绳索(共两根,左右各一根),翼伞操纵绳张力状态的不同决定了翼伞的飞行姿态是滑翔,减速还是雀降,探究翼伞滑行过程中操纵绳的受力变化对翼伞控制的影响,是翼伞研究中的重要一环。因此在翼伞的研究设计过程中,需要对翼伞飞行过程中的伞绳受力变化进行监控与测量,判断操纵力输入与翼伞响应之间的关系,从而确定翼伞降落的操纵力、操纵速度和操纵时机等。
3.张力传感器根据应用场合不同有不同的种类。目前主要有纱线张力测量传感器、膜张力测量传感器、钢索类张力测量传感器三种类型。纱线张力传感器一般针对较细的纱线、细丝等张力的测量,量程相对较小;膜张力测量传感器多针对膜表面张力的测量;钢索类张力传感器一般针对高强度的钢性材料如钢丝绳等进行张力测量,量程可以很大。
4.而针对翼伞操纵绳这样的柔性绳索类对象,目前少有合适的张力测量工具,绳索张力按测量原理可分为直接测量和间接测量两种方式。直接测量法是将绳索截断,串连接入传感器直接测量拉力;间接测量法通过力的转化,将张力转化为其他物理量来进行测量。直接测量法对伞绳有损,无法应用于翼伞飞行测试。因此需要寻找合适的间接测量方案。
5.在翼伞降落的各个阶段,翼伞的运动姿态会不停变化,用于控制飞行姿态的操纵绳张力也会出现大范围的变化。实时掌握翼伞降落飞行过程中的操纵绳张力,确定操纵力与翼伞姿态的反馈关系,对翼伞飞行的安全性以及着陆地点的精确性十分重要。现有的张力传感器难以应用于翼伞操纵绳的张力测量,因此需要设计合适的张力测量装置来解决翼伞操纵绳的张力测量问题。
技术实现要素:
6.本发明所要解决的技术问题是针对背景技术中所涉及到的缺陷,提供一种非侵入式翼伞操纵绳张力传感器。
7.本发明为解决上述技术问题采用以下技术方案:一种非侵入式翼伞操纵绳张力传感器,包括第一至第二弹性梁、第一至第三固定组件、以及第一至第四应变片;所述第一弹性梁与第二弹性梁为结构相同长方体,均包含第一端壁、第二端壁、以及首尾相连第一至第四侧壁,其中,所述第一侧壁平行于第三侧壁,第二侧壁平行于第四侧壁,第一侧壁的长度大于第二侧壁;所述第一端壁在第二侧壁、第四侧壁之间依次设有第一沉头通孔、h形通槽、第二沉头通孔、第三沉头通孔;所述h形通槽包含第一竖槽、第二竖槽和横槽,横槽平行于第一侧壁,横槽的两端分别和第一竖槽、第二竖槽的中点处垂直相连,第一竖槽、第二竖槽的两端均呈朝外凸起的半圆柱状;令平面a位于第一侧壁、第三侧壁之间,
平行于第一侧壁,且平面a到第一侧壁、第三侧壁之间的距离相等,则所述第一沉头通孔、h形通槽、第二沉头通孔、第三沉头通孔均关于平面a对称,且第一沉头通孔、第二沉头通孔和h形通槽之间的距离相等;所述第一侧壁、第三侧壁分别在h形通槽处设有对称的第一梯形凹槽、第二梯形凹槽;所述第一至第三固定组件结构相同,均包含螺钉、螺母和套筒,所述套筒和所述螺钉的螺柱间隙配合;所述第一弹性梁与第二弹性梁平行设置,使得第一弹性梁的第二端壁、第二弹性梁的第二端壁位于第一弹性梁的第一端壁、第二弹性梁的第一端壁之间;所述第一固定组件的螺钉从第一弹性梁的第一沉头通孔穿入,依次穿过第一固定组件的套筒、第二弹性梁的第一沉头通孔后和第一固定组件的螺母螺纹相连,使得第一固定组件的套筒两端分别和第一弹性梁、第二弹性梁相抵且第一固定组件中螺钉的螺帽位于第一弹性梁第一沉头通孔的沉头内、第一固定组件的螺母位于第二弹性梁第一沉头通孔的沉头内;所述第二固定组件的螺钉从第一弹性梁的第二沉头通孔穿入,依次穿过第二固定组件的套筒、第二弹性梁的第二沉头通孔后和第二固定组件的螺母螺纹相连,使得第二固定组件的套筒两端分别和第一弹性梁、第二弹性梁相抵且第二固定组件中螺钉的螺帽位于第一弹性梁第二沉头通孔的沉头内、第二固定组件的螺母位于第二弹性梁第二沉头通孔的沉头内;所述第三固定组件的螺钉从第一弹性梁的第三沉头通孔穿入,依次穿过第三固定组件的套筒、第二弹性梁的第三沉头通孔后和第三固定组件的螺母螺纹相连,使得第三固定组件的套筒两端分别和第一弹性梁、第二弹性梁相抵且第三固定组件中螺钉的螺帽位于第一弹性梁第三沉头通孔的沉头内、第三固定组件的螺母位于第二弹性梁第三沉头通孔的沉头内;所述第一至第四应变片型号相同,均设置在所述第一弹性梁上,其中,第一应变片、第二应变片分别设置在所述第一梯形凹槽位于第一竖槽、第二竖槽的底壁上,第三应变片、第四应变片分别设置在所述第二梯形凹槽位于第一竖槽、第二竖槽的底壁上,第一应变片、第二应变片、第三应变片、第四应变片依序相连组成全桥电路,用于进行信号转换、将第一弹性梁的形变转换为模拟电压信号输出。
8.作为本发明一种非侵入式翼伞操纵绳张力传感器进一步的优化方案,所述第一、第二弹性梁的棱边均做倒圆角平滑处理。
9.作为本发明一种非侵入式翼伞操纵绳张力传感器进一步的优化方案,所述第一、第二弹性梁中:令平面b垂直于平面a且第二沉头通孔、第三沉头通孔关于平面b对称;所述第一端面在第二沉头通孔、第三沉头通孔之间设有第一平衡通孔、第二平衡通孔,所述第一平衡通孔、第二平衡通孔关于平面a对称且第一平衡通孔、第二平衡通孔均关于平面b对称,第一平衡通孔和第一侧壁之间的距离小于第一平衡通孔和第三侧壁之间的距离;所述第一侧壁上设有平行于第二侧壁且和所述第一平衡通孔相联通的第一平衡槽,所述第三侧壁上设有平行于第二侧壁且和所述第二平衡通孔相联通的第二平衡槽;所
述第一平衡槽、第二平衡槽均关于平面b对称;所述第一平衡槽和第一平衡通孔组成第一力平衡槽、第二平衡槽和第二平衡通孔组成第二力平衡槽。
10.作为本发明一种非侵入式翼伞操纵绳张力传感器进一步的优化方案,本发明还包含信号采集电路板,所述信号采集电路板和所述第一至第四应变片组成的全桥电路电气相连,用于全桥电路输出的模拟电压信号并将其转换为张力数据进行存储。
11.本发明的使用方法如下, 使操纵绳从第一、第二固定组件的套筒之间穿入并从第二、第三固定组件的套筒之间穿出,当操纵绳两端受张力作用时,操纵绳受力绷直并对第一至第三固定组件的套筒施加压迫作用,迫使第一弹性梁、第二弹性梁产生弹性形变进而使得第一弹性梁上的第一至第四应变片跟随第一悬臂梁产生形变,应变片阻值产生变化后其组成的应变全桥电路输出相应的模拟电压信号。
12.本发明采用以上技术方案与现有技术相比,具有以下技术效果:1.传感器采用非侵入式的设计,不破坏操纵绳结构,便于张力的无损测量;第一、第二弹性梁设计简洁,便于加工;装置整体尺寸小,重量轻,不影响翼伞飞行安全,不影响操纵绳工作状态,适用于翼伞飞行的特殊工作需求;2.克服了当前柔性绳索类对象缺乏张力测量方法的问题,提出了一种可行的柔性绳索张力测量的装置及方案;3. 第一、第二弹性梁设计合理,应力应变区域集中、数值大小合适,且预留了一定的超量程测量裕度,以应对翼伞开伞时可能带来的张力过载;4.双片相同式的弹性梁设计,可保证传感器受力重心不产生偏移,张力分布更为均匀,从而保证张力测量的准确性;5.传感器采用分体式的结构,便于装置在翼伞操纵绳上的安装及拆卸,也方便单一结构部件在因长时间使用磨损等原因出现问题时,能及时进行更换。
附图说明
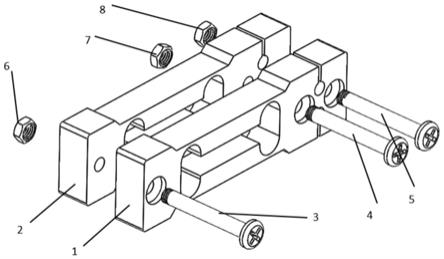
13.图1为本发明的爆炸结构示意图;图2为本发明工作时的示意图;图3为本发明的结构力学仿真分析云图。
14.图中,1
‑
第一弹性梁,2
‑
第二弹性梁,3
‑
第一固定组件的螺钉,4
‑
第二固定组件的螺钉,5
‑
第三固定组件的螺钉,6
‑
第一固定组件的螺母,7
‑
第二固定组件的螺母,8
‑
第三固定组件的螺母,9
‑
翼伞的操纵绳,10
‑
第一弹性梁的h形通槽,11
‑
第一弹性梁的第一梯形凹槽,12
‑
第一弹性梁的第一力平衡槽。
具体实施方式
15.下面结合附图对本发明的技术方案做进一步的详细说明:本发明可以以许多不同的形式实现,而不应当认为限于这里所述的实施例。相反,提供这些实施例以便使本公开透彻且完整,并且将向本领域技术人员充分表达本发明的范围。在附图中,为了清楚起见放大了组件。
16.如图1所示,本发明公开了一种非侵入式翼伞操纵绳张力传感器,包括第一至第二
弹性梁、第一至第三固定组件、以及第一至第四应变片;所述第一弹性梁与第二弹性梁为结构相同长方体,均包含第一端壁、第二端壁、以及首尾相连第一至第四侧壁,其中,所述第一侧壁平行于第三侧壁,第二侧壁平行于第四侧壁,第一侧壁的长度大于第二侧壁;所述第一端壁在第二侧壁、第四侧壁之间依次设有第一沉头通孔、h形通槽、第二沉头通孔、第三沉头通孔;所述h形通槽包含第一竖槽、第二竖槽和横槽,横槽平行于第一侧壁,横槽的两端分别和第一竖槽、第二竖槽的中点处垂直相连,第一竖槽、第二竖槽的两端均呈朝外凸起的半圆柱状;令平面a位于第一侧壁、第三侧壁之间,平行于第一侧壁,且平面a到第一侧壁、第三侧壁之间的距离相等,则所述第一沉头通孔、h形通槽、第二沉头通孔、第三沉头通孔均关于平面a对称,且第一沉头通孔、第二沉头通孔和h形通槽之间的距离相等;所述第一侧壁、第三侧壁分别在h形通槽处设有对称的第一梯形凹槽、第二梯形凹槽;所述第一至第三固定组件结构相同,均包含螺钉、螺母和套筒,所述套筒和所述螺钉的螺柱间隙配合;所述第一弹性梁与第二弹性梁平行设置,使得第一弹性梁的第二端壁、第二弹性梁的第二端壁位于第一弹性梁的第一端壁、第二弹性梁的第一端壁之间;所述第一固定组件的螺钉从第一弹性梁的第一沉头通孔穿入,依次穿过第一固定组件的套筒、第二弹性梁的第一沉头通孔后和第一固定组件的螺母螺纹相连,使得第一固定组件的套筒两端分别和第一弹性梁、第二弹性梁相抵且第一固定组件中螺钉的螺帽位于第一弹性梁第一沉头通孔的沉头内、第一固定组件的螺母位于第二弹性梁第一沉头通孔的沉头内;所述第二固定组件的螺钉从第一弹性梁的第二沉头通孔穿入,依次穿过第二固定组件的套筒、第二弹性梁的第二沉头通孔后和第二固定组件的螺母螺纹相连,使得第二固定组件的套筒两端分别和第一弹性梁、第二弹性梁相抵且第二固定组件中螺钉的螺帽位于第一弹性梁第二沉头通孔的沉头内、第二固定组件的螺母位于第二弹性梁第二沉头通孔的沉头内;所述第三固定组件的螺钉从第一弹性梁的第三沉头通孔穿入,依次穿过第三固定组件的套筒、第二弹性梁的第三沉头通孔后和第三固定组件的螺母螺纹相连,使得第三固定组件的套筒两端分别和第一弹性梁、第二弹性梁相抵且第三固定组件中螺钉的螺帽位于第一弹性梁第三沉头通孔的沉头内、第三固定组件的螺母位于第二弹性梁第三沉头通孔的沉头内;所述第一至第四应变片型号相同,均设置在所述第一弹性梁上,其中,第一应变片、第二应变片分别设置在所述第一梯形凹槽位于第一竖槽、第二竖槽的底壁上,第三应变片、第四应变片分别设置在所述第二梯形凹槽位于第一竖槽、第二竖槽的底壁上,第一应变片、第二应变片、第三应变片、第四应变片依序相连组成全桥电路,用于进行信号转换、将第一弹性梁的形变转换为模拟电压信号输出。
17.作为本发明一种非侵入式翼伞操纵绳张力传感器进一步的优化方案,所述第一、第二弹性梁的棱边均做倒圆角平滑处理。
18.作为本发明一种非侵入式翼伞操纵绳张力传感器进一步的优化方案,所述第一、第二弹性梁中:
令平面b垂直于平面a且第二沉头通孔、第三沉头通孔关于平面b对称;所述第一端面在第二沉头通孔、第三沉头通孔之间设有第一平衡通孔、第二平衡通孔,所述第一平衡通孔、第二平衡通孔关于平面a对称且第一平衡通孔、第二平衡通孔均关于平面b对称,第一平衡通孔和第一侧壁之间的距离小于第一平衡通孔和第三侧壁之间的距离;所述第一侧壁上设有平行于第二侧壁且和所述第一平衡通孔相联通的第一平衡槽,所述第三侧壁上设有平行于第二侧壁且和所述第二平衡通孔相联通的第二平衡槽;所述第一平衡槽、第二平衡槽均关于平面b对称;所述第一平衡槽和第一平衡通孔组成第一力平衡槽、第二平衡槽和第二平衡通孔组成第二力平衡槽。
19.本发明的使用方法如下,如图2所示,使操纵绳从第一、第二固定组件的套筒之间穿入并从第二、第三固定组件的套筒之间穿出,当操纵绳两端受张力作用时,操纵绳受力绷直并对第一至第三固定组件的套筒施加压迫作用,迫使第一弹性梁、第二弹性梁产生弹性形变进而使得第一弹性梁上的第一至第四应变片跟随第一悬臂梁产生形变,应变片阻值产生变化后其组成的应变全桥电路输出相应的模拟电压信号。
20.如图3所示,传感器结构模型的力学仿真结果显示:传感器弹性体结构设计合理,符合测力传感器设计的应力集中原则。应力大小合理、区域集中,便于应变片定位粘贴,应变数值大小合适,满足应变片工作要求。
21.本发明还包含可以进一步包含信号采集电路板,所述信号采集电路板和所述第一至第四应变片组成的全桥电路电气相连,用于全桥电路输出的模拟电压信号并将其转换为张力数据进行存储。
22.所述信号采集电路板包含信号调理单元、ad模数转换单元、计算单元、稳压单元、电源、以及数据存储单元等,用以采集、处理并保存翼伞工作过程中的操纵绳张力数据。在翼伞飞行结束后,取出信号采集电路板中用于保存数据的sd卡,便可在地面端读取出翼伞飞行全过程的操纵绳张力数据。
23.本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
24.以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1