一种毫米波雷达的测试装置的制作方法
1.本发明涉及一种毫米波雷达的测试装置。
背景技术:
2.随着智能汽车的不断发展,辅助驾驶系统在车辆上的应用越来越普及,其部分辅助驾驶功能是基于毫米波雷达实现。毫米波雷达具有全天候、长距离和高分辨率定位目标的能力。探测角度和探测距离等测试是毫米波雷达自身性能的必要测试内容。
3.测试毫米波雷达的测试方法常见有如下几种:
4.第一种是采用固定测试台,测试过程中雷达位置固定,测试目标需要进行移动。采用这种测试方法需要较大且空旷的场地。
5.第二种是采用转动式测试台,通过转动式测试台固定雷达,测试过程中雷达可以转动位置,被测目标固定。这种测试方法较之第一种测试方法所需的场地可以适当减小。但如果需要测试长距离目标时,仍然需要提供较长的场地。
6.以上两种方法均会因为周围场地环境,或是地面的不平整产生雷达假目标,影响测试结果。
7.现有的毫米波测试环境因为需要大且空旷的场地,对场地要求较高,所以测试场地都是固定的。需要对雷达作测试时,必须送到专用的测试场地才能进行测试。
技术实现要素:
8.本发明的目的是提出一种毫米波雷达的测试装置,针对毫米波雷达性能测试需要专用场地的现状,提供一种可以便于组装的测试室,占地面积小,可以灵活地在任意地方快捷的布置测试装置,进行雷达性能的测试。
9.本发明的一种毫米波雷达的测试装置,包括用于固定雷达的雷达支架,以及至少由模块化的底板和模块化的背板拼接围成的测试室,所述测试室的底板和背板的内侧面均覆盖有吸波材料使所述测试室内由吸波材料无间隙拼接在一起模拟出空旷场地,所述测试室的底板上设置有转台,所述转台的中孔内固定立设所述雷达支架,所述转台的转动盘固定连接有一个抱杆,所述抱杆上端设置有目标模拟器的射频天线,所述雷达支架、所述抱杆和所述射频天线均位于所述测试室内部,并使所述射频天线与所述雷达支架上安装的雷达位于同一高度,所述背板上端高于所述雷达支架上雷达的安装高度;
10.所述射频天线接收所述雷达信号后,通过所述目标模拟器提供被模拟目标的回波信号,判断所述雷达能否接收所述回波信号。
11.本发明采用现有技术的目标模拟器,其是仿真毫米波雷达的射频信号的关键部件,通过射频天线接收端接收雷达信号后,采用距离-傅里叶变换、速度-傅里叶变换算法对该电磁波信号进行时域、频域分析,解析雷达波信号特征。再根据建模场景软件中雷达模型传递的被模拟目标速度、距离、雷达散射截面rcs(radar cross section)值信息,使用射频信号技术对目标模拟器接收到的雷达波进行回波延时、多普勒频移、信号增益与衰减三项
操作,实现对雷达目标信号的速度、距离、rcs值的模拟。测试时,雷达固定在所述雷达支架上,位置保持不变,射频天线的位置跟随抱杆的转动而转动。通过改变射频天线的位置让雷达进行探测,进而测试出雷达的探测性能参数。
12.本发明还具有以下优选设计:
13.本发明所述测试室的顶面和一个侧面为开放式,所述转台设置于接近该开放式侧面的底板边缘中心的内侧,充分利用测试室的空间,减小测试室的用材和占地面积。
14.本发明所述测试室为顶面和一个侧面开放的长方体形。
15.所述测试室的底板和背板均通过魔术贴粘接所述吸波材料。
16.本发明的所述吸波材料在18ghz~110ghz下反射率至少为-55db。
17.本发明所述抱杆包括转动臂和立杆,所述转动臂的一端固定连接所述转台的转动盘,所动转动臂的另一端立设所述立杆,所述立杆上部连接一个支撑面,所述射频天线安装在所述支撑面上。
18.本发明所述抱杆随所述转台转动的角度范围为
±
90
°
,所述抱杆转动的轨迹均位于所述测试室内部。
19.本发明所述立杆为可调节高度的立杆,便于调节所述射频天线的高度。
20.所述雷达支架上开设有用于固定所述雷达在不同高度的长形孔,可以将雷达固定在不同高度位置。
21.所述抱杆和所述雷达支架上均包覆有吸波材料,避免抱杆和雷达支架等产生假目标。
22.本发明具有以下有益效果:
23.1.本发明提供了一个易于组装的毫米波雷达测试装置,在测试室内侧覆盖吸波材料模拟出空旷的场地,排除实际测试场地可能产生的假目标干扰。并且测试室的占地面积小,一般占地5m2,可以在现场快速拼装,灵活地布置任意地方进行雷达性能测试。
24.2.本发明组成测试室的底板和背板均可以模块化,底板可由相同的模组拼接,背板也可由相同的模板拼接,易于收纳和存放。
25.3.本发明适用于所有毫米波雷达角度和距离的测试,结构简单,造价低,适用性强。
附图说明
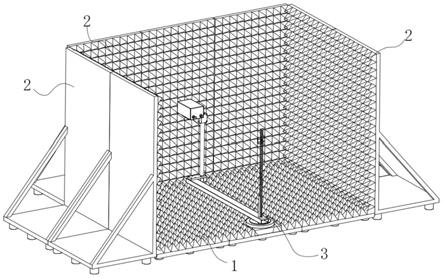
26.图1是本发明一种毫米波雷达的测试装置的立体图;
27.图2是图1中底板的立体图,该图含吸波材料;
28.图3是图2的底板在另一角度的立体图;
29.图4是图1中背板的立体图,该图含吸波材料;
30.图5是图4的背板在另一角度的立体图;
31.图6是本发明测试室内部的雷达支架、雷达、抱杆和射频天线的装配立体图;
32.图7是图6在另一角度的立体图;
33.图8是图6中雷达支架、雷达、抱杆和射频天线的装配后的俯视图。
34.附图标记说明:
35.1-底板,11-底板地脚,12-底板吸波材料;2-背板,21-背板地脚,22-背板吸波材
料;3-测试组件,31-转台,32-雷达支架,33-雷达,34-抱杆,35-射频天线,351-接线口。
具体实施方式
36.下面结合附图和实施例,详细说明本发明的技术方案,以便本领域普通技术人员更好地理解和实施本发明的技术方案。
37.如图1至图8所示,一种毫米波雷达的测试装置,包括用于固定雷达33的雷达支架32,以及至少由模块化的底板1和模块化的背板2拼接围成的测试室,所述测试室的底板1和背板2的内侧面均覆盖有吸波材料使所述测试室内由吸波材料无间隙拼接在一起模拟出空旷场地,所述测试室的底板1上设置有转台31,转台31的中孔内固定立设雷达支架32,转台31的转动盘固定连接有一个抱杆34,抱杆34上端设置有目标模拟器的射频天线35,雷达支架32、抱杆34和射频天线35均位于所述测试室内部,并使射频天线35与雷达支架32上安装的雷达33位于同一高度,背板2上端高于雷达支架32上雷达33的安装高度;
38.射频天线35接收雷达33的信号后,通过所述目标模拟器提供被模拟目标的回波信号,判断所述雷达能否接收所述回波信号。其中转台31、雷达支架32、雷达33、抱杆34、射频天线35构成本发明的测试组件3。
39.作为优选,本实施例采用现有技术的目标模拟器,例如:德keysight e8718a或者za0023a雷达目标模拟器。通过射频天线35接收端接收雷达33的信号后,采用距离-傅里叶变换、速度-傅里叶变换算法对该电磁波信号进行时域、频域分析,解析雷达波信号特征。再根据建模场景软件中雷达模型传递的被模拟目标速度、距离、雷达散射截面rcs(radar cross section)值信息,使用射频信号技术对目标模拟器接收到的雷达波进行回波延时、多普勒频移、信号增益与衰减三项操作,实现对雷达目标信号的速度、距离、rcs值的模拟。其中目标模拟器可以设置在测试室外部,通过数据线连接在射频天线35的接线口351上互相传输数据。
40.作为优选实施例:
41.测试室的顶面和一个侧面为开放式,转台31设置于接近该开放式侧面的底板边缘中心的内侧,具体如图1所示,所述测试室为顶面和一个侧面开放的长方体形。所述测试室的底板和背板均通过魔术贴粘接所述吸波材料,将魔术贴的子母贴用胶水对应粘贴在底板、背板的内侧面以及吸波材料的背面。其中吸波材料在18ghz~110ghz下反射率至少-55db,本实施例中选用德国奥尔托项目股份有限公司生产的商标为wavasorb,型号为vhp-4的吸波材料。
42.如图2和图3所示,底板1的底面设置底板地脚11,底板1的上面粘贴底板吸波材料12。如图4和图5所示,为保证背板2的稳定性,背板2设置成l形,并设加固型三角支架,背板2的底面设置背板地脚21,背板2的内侧面粘贴背板吸波材料22。通过7块背板2和若干底板1即可拼装成图1的测试室。
43.如图6至图8所示,抱杆34包括转动臂和立杆,所述转动臂的一端固定连接转台31的转动盘,所动转动臂的另一端立设所述立杆,所述立杆上部连接一个支撑面,射频天线35安装在所述支撑面上。其中转台由驱动电机、齿轮组和转动盘构成,转动盘连接在齿轮组上,通过驱动电机带动齿轮组转动,进而驱动转动盘旋转,使抱杆34和转动盘一起旋转。抱杆34随转台31转动的角度范围为
±
90
°
,转动过程由驱动电机自动控制,并要保证抱杆34转
动的轨迹均位于所述测试室内部。
44.所述立杆为可调节高度的立杆,便于调节射频天线35的高度,立杆可以是套筒式结构,通过紧固螺钉等限位方式上下调节高度。
45.雷达支架32上开设有用于固定雷达33在不同高度的长形孔,可以通过紧固螺栓等将雷达33固定在长形孔的不同高度位置。
46.抱杆34和雷达支架32上均包覆有吸波材料,避免抱杆34和雷达支架32等产生影响测试结果的假目标。
47.测试过程如下:
48.1.确定雷达33装设高度(或使用常用高度),将被测雷达33与射频天线35调整至既定的装设高度上。
49.2.连接设备线束,启动目标模拟器与被测雷达33本身。
50.3.将射频天线35正对雷达33,选择被测雷达33探测距离范围的中值,将中值输入目标模拟器,即距离设置为中值,速度设定为0,rcs设定为20。观察雷达33是否能正常检测到该目标,确定被测雷达与目标模拟器正常运行。
51.4.确认正常运行状态后进行距离测试,将确定目标在角度为0
°
时的距离范围,设定模拟器目标在目标区域内径从0m处开始远离雷达,目标距离参数每次调整0.1m,速度保持为0,rcs保持为20,保持该状态3s,等待雷达探测目标,直至找到该角度下雷达的最大探测距离。
52.5.进行角度测试,将被测雷达的最大测试距离设置为模拟距离,速度设置为0,rcs设置为20,设定转台起始角度为-90
°
,从-90
°
旋转至90
°
的过程中,每次旋转1度,保持3s,等待雷达探测目标,直至找到雷达的最大探测角度与最小探测角度。
53.6.完成测试。
54.上述实施例仅是本发明较优实施例,但并不能作为对发明的限制,任何基于本发明构思基础上作出的变型和改进,均应落入到本发明保护范围之内,具体保护范围以权利要求书记载为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1