一种圆光栅编码器的偏心校正方法与流程
1.本发明涉及圆光栅编码器校正技术领域,具体提供一种圆光栅编码器的偏心校正方法。
背景技术:
2.圆光栅编码器是精密角度测量的测量工具,其被大量应用在数控数显机床上、关节式坐标测量机和机器人等设备上。
3.圆光栅编码器的核心部件为光栅码盘和读数头,光栅码盘固定于编码器转轴上保持同步旋转,读数头固定与编码器固定部件上,两部件之间可进行相对回转运动。由于编码器安装工艺限制,安装过程中光栅码盘的光学圆心与编码器轴系的回转轴心不重合而出现的安装偏心误差。因此,在使用圆光栅编码器之前,需要调试将光栅码盘的安装误差控制在预设范围内。现有的圆光栅编码器通常是通过调整径向跳动的大小来调整光栅码盘与转轴的安装位置精度。
4.但是,上述调整方式是对整个光栅码盘整体调整,无法对光栅码盘局部进行微调。
技术实现要素:
5.本发明旨在解决上述技术问题,即,解决现有的调整方法无法对光栅码盘局部进行微调的问题。
6.本发明提供一种圆光栅编码器的偏心校正方法,所述校正方法包括:使光栅码盘按照设定的方式旋转,确定设定的多个偏心角度的角度误差值;根据多个偏心角度的角度误差值,确定待调整的角度误差值;根据所述待调整的角度误差值计算出偏心距;根据对应于所述待调整的角度误差值的偏心角度以及所述偏心距,对所述光栅码盘进行局部校正。
7.作为本发明提供的上述偏心校正方法的一种优选的技术方案,所述的“根据多个偏心角度的角度误差值,确定待调整的角度误差值”包括:根据多个偏心角度的角度误差值,确定出角度误差曲线;基于所述角度误差曲线,确定待调整的角度误差值。
8.作为本发明提供的上述圆光栅编码器的偏心校正方法的一种优选的技术方案,所述的“根据多个偏心角度的角度误差值,确定出角度误差曲线”包括:所述角度误差曲线通过最小二乘法或拉格朗日插值法拟合形成。
9.作为本发明提供的上述圆光栅编码器的偏心校正方法的一种优选的技术方案,所述的“基于所述角度误差曲线,确定待调整的角度误差值”包括:获取所述角度误差曲线上的角度误差值中的最大值和最小值;根据所述最大值和所述最小值,确定待调整的角度误差值。
10.作为本发明提供的上述圆光栅编码器的偏心校正方法的一种优选的技术方案,所述的“根据所述最大值和所述最小值,确定待调整的角度误差值”包括:计算所述最大值和所述最小值的平均值并将该平均值作为待调整的角度误差值。
11.作为本发明提供的上述圆光栅编码器的偏心校正方法的一种优选的技术方案,所
述的“根据所述待调整的角度误差值计算出偏心距”12.根据如下的公式(1)计算出与待调整的角度误差值对应的弧长e,根据e计算出偏心距x:
[0013][0014]
公式(1)中,d为光栅码盘的直径,θ为待调整的角度误差值。
[0015]
作为本发明提供的上述圆光栅编码器的偏心校正方法的一种优选的技术方案,所述圆光栅编码器包括光栅码盘和读数头,所述光栅码盘通过多个紧固件固定在对应转台的转轴上,所述“根据对应于所述偏心距的偏心角度,对所述光栅码盘进行局部校正”包括:确定出对应于所述待调整的角度误差值的偏心角度附近的至少一个紧固件,通过调整该至少一个紧固件中的一个或者多个的方式对所述光栅码盘进行局部校正。
[0016]
作为本发明提供的上述圆光栅编码器的偏心校正方法的一种优选的技术方案,所述的“确定出对应于所述待调整的偏心距的偏心角度附近的至少一个紧固件,通过调整该至少一个紧固件中的一个或者多个的方式对所述光栅码盘进行局部校正”包括:确定出最接近对应于所述待调整的角度误差值的偏心角度附近的第一紧固件;确定出邻近所述第一紧固件的至少一个第二紧固件;通过调整所述第一紧固件和所述第二紧固件的方式对所述光栅码盘进行局部校正。
[0017]
作为本发明提供的上述圆光栅编码器的偏心校正方法的一种优选的技术方案,所述的“确定出邻近所述第一紧固件的至少一个第二紧固件”包括:在所述第一紧固件的两侧分别确定出至少一个第二紧固件。
[0018]
作为本发明提供的上述圆光栅编码器的偏心校正方法的一种优选的技术方案,所述第一紧固件的调整力度大于所述第二紧固件的调整力度。
[0019]
在采用上述技术方案的情况下,本发明的圆光栅编码器的偏心校正方法具有如下的技术效果:
[0020]
通过根据多个偏心角度的角度误差值,确定待调整的角度误差值;根据待调整的角度误差值计算出偏心距;根据对应于待调整的角度误差值的偏心角度以及偏心距,对光栅码盘进行局部校正。如此,能够定位到待调整的角度误差值的偏心角度以及偏心距对光栅码盘局部进行校正。
附图说明
[0021]
下面结合附图来描述本发明圆光栅编码器的偏心校正方法的优选实施方式,附图中:
[0022]
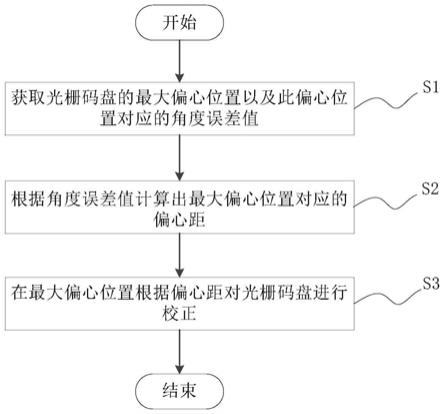
图1是本实施例的圆光栅编码器的偏心校正方法的主要流程示意图;
[0023]
图2是本实施例的一种圆光栅编码器角度误差曲线的示意图。
具体实施方式
[0024]
下面参照附图来描述本发明的优选实施方式。本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非旨在限制本发明的保护范围。
[0025]
需要说明的是,在本发明的描述中,术语“第一”、“第二”、“第三”仅用于描述目的,
而不能理解为指示或暗示相对重要性。
[0026]
此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
[0027]
需要说明的是,先将圆光栅编码器贴合在转轴的安装面,对其对应的螺纹安装孔,通过力矩扳手拧紧螺钉;之后将回转轴校准装置定位在转轴上并调整安装在转轴外侧的激光装置的准直,即将回转轴校准装置安装在回转轴上,角度分光镜固定在激光装置与回转轴校准装置之间,调整激光头、分光镜和回转轴校准装置在一条直线上;在轴的起始位置将激光装置归零,即将在计算机上开始采集数据并运行数控程序;轴到达起始目标位置,开始通过回转轴校准装置记录光栅码盘的实际转动角度数据和编码器读数头记录圆光栅转动角度数据。光栅码盘按照设定的方式旋转,回转轴校准装置获取多个光栅码盘的实际转动角度数据,同时通过读数头可以获取多个光栅码盘转动一周时的偏心转动角度数据。
[0028]
为了解决现有技术中的上述问题,即为了解决现有的调整方法无法对光栅码盘局部进行微调的问题,请参见图1,本实施例提供了一种圆光栅编码器的偏心校正方法,校正方法包括:s1、使光栅码盘按照设定的方式旋转,确定设定的多个偏心角度的角度误差值;s2、根据多个偏心角度的角度误差值,确定待调整的角度误差值;s3、根据待调整的角度误差值计算出偏心距;s4、根据对应于待调整的角度误差值的偏心角度以及偏心距,对光栅码盘进行局部校正。
[0029]
s1、使光栅码盘按照设定的方式旋转,确定设定的多个偏心角度的角度误差值。
[0030]
具体地,光栅码盘按照设定的间隔角度旋转一周,通过激光装置和回转轴校准装置来获取光栅码盘的实际转动角度数据,通过读数头来获取同一转动角度下光栅码盘的偏心转动角度,通过光栅码盘的实际转动角度数据与光栅码盘的偏心转动角度做差获得偏心角度的角度误差值。
[0031]
s2、根据多个偏心角度的角度误差值,确定待调整的角度误差值。
[0032]
具体地,根据多个偏心角度的角度误差值,确定出角度误差曲线;基于角度误差曲线,确定待调整的角度误差值。
[0033]
其中,角度误差曲线的横坐标为光栅码盘的实际转动角度,角度误差曲线的纵坐标为光栅码盘的实际转动角度对应的偏心角度的角度误差值。
[0034]
可以理解的是,获取光栅码盘的实际转动角度数据和获取的光栅码盘的偏心转动角度数据越多,得到的角度误差曲线越精确,但数据越多,其计算时间也越长。因此,本实施例中在既保证精确度又减少计算时间的情况下,选择光栅码盘按照间隔角度5
°
旋转,获取72组光栅码盘的实际转动角度和光栅码盘偏心的转动角度数据,如此,可以即保证精确度又减少计算时间,通过对72组数据进行数据拟合绘制成偏心误差曲线。
[0035]
本实施例中,对于光栅码盘的实际转动角度和光栅码盘偏心的转动角度数据可以采用最小二乘法进行拟合,也可以通过拉格朗日插值法进行拟合。
[0036]
可以理解的是,上述的间隔角度取值是示意性的,在其他的实施方式中还可以采用其他方式。例如,选择间隔角度为3
°
、8
°
、10
°
等。同时,上述的最小二乘法和拉格朗日插值
法对光栅码盘的实际转动角度和光栅码盘偏心的转动角度数据的拟合是示意性的,在其他的实施例中还可以是其他方式,例如,可以选取加权的最小二乘法进行拟合,或者选用加权的拉格朗日插值法进行拟合。当然也可以选取其他能够拟合曲线的函数,只要其能够将多组数据拟合成光滑曲线即可。
[0037]
在本实施例提供的圆光栅编码器的偏心校正方法的一种优选的实施方式,获取角度误差曲线上的角度误差值中的最大值和最小值;根据最大值和最小值,确定待调整的角度误差值。
[0038]
通过最小二乘法将光栅码盘的实际转动角度和光栅码盘偏心的转动角度数据拟合成角度误差曲线,从而获得对应的曲线函数,通过曲线函数获取角度误差值中的最大值和最小值,并根据最大值和最小值来确定待调整的角度误差值。
[0039]
在本实施例提供的圆光栅编码器的偏心校正方法的一种优选的实施方式,对于角度误差值可以通过计算最大值和所述最小值的平均值获得。
[0040]
需要说明的是,因光栅码盘与转轴偏心安装,所以获取的角度误差曲线为波浪形。如此,从图形上看误差曲线包括上升阶段和下降阶段。当误差曲线处于上升阶段时,即从误差曲线中偏心角度误差值最小位置上升至偏心角度误差值最大位置,此时,光栅码盘的实际转动角度大于光栅码盘的偏心转动角度,光栅码盘相对于转台位置逐渐远离激光装置的检测头,偏心角度误差最大值和最小值的平均值为确定待调整的角度误差值,此时激光装置的检测头、光栅码盘的圆心和转台转轴的圆心共线。因此,需要找出角度误差曲线的上升阶段,从而根据上升阶段的偏心角度误差最大值和最小值计算出偏心角度误差最大值和最小值两者的平均值,从而根据角度误差曲线来获取平均值对应的光栅码盘的实际转动角度,从而确定待调整的角度误差值以及其对应的光栅码盘的实际转动角度位置。
[0041]
可以理解的是,上述对于获取确定待调整的角度误差值的方式是示意性的,在其他的实施例中也可以采用其他方式。
[0042]
s3、根据待调整的角度误差值计算出偏心距。
[0043]
具体地,
[0044]
根据如下的公式(1)计算出与待调整的角度误差值对应的弧长e,根据e计算出偏心距x:
[0045][0046]
公式(1)中,d为光栅码盘的直径,θ为待调整的角度误差值。其中,对于同一个光栅码盘的待调整的角度误差值和对应的弧长关系存在如下公式(2):
[0047][0048]
对应的弧长很小时,其角度误差值对应的偏心距约等于待调整的角度误差值对应的弧长,即x≈e,因此可以将公式(1)和公式(2)整理成如下公式(3):
[0049][0050]
从而可以根据公式(3)计算出偏心距x。
[0051]
s4、根据对应于待调整的角度误差值的偏心角度以及偏心距,对光栅码盘进行局部校正。
[0052]
具体地,确定出对应于待调整的角度误差值的偏心角度附近的至少一个紧固件,通过调整该至少一个紧固件中的一个或者多个的方式对光栅码盘进行局部校正。
[0053]
例如,确定出对应于待调整的角度误差值的偏心角度恰好对应有紧固件,然后根据此待调整的角度误差值对应的偏心距选择只调节此紧固件即可完成局部校正。当然,在对于紧固件的调整时,为了保护光栅码盘不会受到过大的锁紧力被破坏,需要将偏心距分成多次进行锁紧,例如需要将偏心距分三次进行锁紧。
[0054]
当然,确定出最接近对应于待调整的角度误差值的偏心角度附近的第一紧固件;确定出邻近第一紧固件的至少一个第二紧固件;通过调整第一紧固件和第二紧固件的方式对光栅码盘进行局部校正。
[0055]
例如,光栅码盘通过多个紧固件与转轴的固定连接,此时,待调整的角度误差值的偏心角度值处没有正对的紧固件,那么优先选取待调整的角度误差值的偏心角度值最近的紧固件设定为第一紧固件,以及在与第一紧固件紧邻的第二紧固件,其中第一紧固件和第二紧固件形成的角度范围包括待调整角度误差之的偏心角度。此时,因第一紧固件为主要待调整紧固件,所以其调整力度大于两侧的第二紧固件,从而对光栅码盘完成局部校正。当然,在对于第一紧固件和第二紧固件的调整时,为了保护光栅码盘不会受到过大的锁紧力被破坏,需要将偏心距分成多次进行锁紧,例如,可以对第一紧固件进行三次锁紧,对第二紧固件进行两次锁紧。如此,通过分别调整第一紧固件和第二紧固件完成对光栅码盘的局部调整。
[0056]
此外,第一紧固件为最接近对应于待调整的角度误差值的偏心角度,因此,其第一紧固件的调整力度大于第二紧固件的调整力度。
[0057]
当然,还可以在第一紧固件的两侧分别确定出至少一个第二紧固件。此时,待调整的角度误差值的偏心角度值处有正对的第一紧固件,在第一紧固件的两侧对称设有两个紧邻的第二紧固件。此时,因第一紧固件为主要待调整紧固件,所以其调整力度大于两侧的第二紧固件,从而对光栅码盘完成局部校正。当然,在对于第一紧固件和第二紧固件的调整时,为了保护光栅码盘不会受到过大的锁紧力被破坏,需要将偏心距分成多次进行锁紧,例如,可以对第一紧固件进行三次锁紧,对第二紧固件进行两次锁紧。如此,通过分别调整第一紧固件和第二紧固件完成对光栅码盘的局部调整。
[0058]
可以理解的是,上述对于光栅码盘进行局部校正的方式示意性的,在其他的实施例中还可以采用其他的方式,只要能够满足对光栅码盘的局部校正即可。
[0059]
在本实施例提供的圆光栅编码器的偏心校正方法的一种优选的实施方式,s4的步骤之后还包括:若待调整的角度误差值大于预设值时,则重复上述过程继续对此光栅码盘进行校正。
[0060]
其中,预设值为光栅码盘安装误差的能接受的最大值,如此,再次复测定位精度,经过多次反复测量校正,直到定位精度满足要求为止,如此达到提高编码器位置精度的目的。
[0061]
在本实施例中,转轴与光栅码盘的安装面为锥面。如此,即便于光栅码盘安装在转轴上,也便于对应光栅码盘上的紧固件调整光栅码盘。其中,光栅码盘锥面的倾斜角度为
15
°±
0.2
°
。
[0062]
在本实施例提供的圆光栅编码器的偏心校正方法的一种优选的实施方式,还包括显示角度误差曲线、角度误差值中的最大值和最小值、待调整的角度误差值、待调整的角度误差值对应的角度以及偏心距。如此,更加直观的显示,方便技术人员对光栅码盘进行局部调整。
[0063]
其中,激光装置、回转轴校准装置以及读数头均通过无线信号与计算机连接。例如,数据处理模块可以通过蓝牙或者wifi与激光装置和回转轴校准装置。此外,计算机收到的光栅码盘的实际转动角度数据和光栅码盘的偏心转动角度,通过最小二乘法将收到的数据拟合成角度误差曲线,并将其显示在显示器上。
[0064]
以校正雷尼绍75mm直径圆光栅编码器为例。具体通过r20-w回转轴校准装置和xl-80激光装置对75mm直径的圆光栅编码器进行校正。
[0065]
先将圆光栅编码器贴合在转轴的安装面,对其对应的螺纹安装孔,通过力矩扳手拧紧螺钉;之后将r20-w回转轴校准装置定位在转轴上并调整安装在转轴外侧的xl-80激光装置的准直,即将r20-w回转轴校准装置安装在回转轴上,角度分光镜固定在xl-80激光装置与r20-w回转轴校准装置之间,调整激光头、分光镜和r20-w回转轴校准装置在一条直线上;在轴的起始位置将xl-80激光装置归零,即将在计算机上开始采集数据并运行数控程序;轴到达起始目标位置,开始通过r20-w回转轴校准装置记录光栅码盘的实际转动角度数据和光栅码盘的偏心转动角度。光栅码盘以5
°
步距开始旋转直至一周停止,r20-w回转轴校准装置获取72个光栅码盘的实际转动角度,同时通过读数头可以获取72个光栅码盘的偏心转动角度,接收到光栅码盘的实际转动角度和光栅码盘的偏心转动角度的数据处理模块根据72组数据及设定好的程序画出角度误差曲线图,如图2所示,并在显示角度误差曲线、角度误差值中的最大值和最小值、待调整的角度误差值、待调整的角度误差值对应的角度以及偏心距。对应的角度误差值最小值为-15"、角度误差值最大值为19"、待调整的角度误差值为17",待调整的角度误差值对应的角度为240
°
,偏心距为3.1μm。
[0066]
具体地偏心距离计算过程如下:根据上述公式(3)求得偏心距x,
[0067][0068]
经计算偏心距离为3.1μm,根据最大偏心位置对应光栅码盘240
°
的位置,将千分表固定在240
°
位置,使用力矩扳手紧固对应的紧固件,一次锁紧1μm,分三次锁紧,使得光栅码盘的圆心向上移动3μm,对光栅码盘进行局部校正,之后再次复测定位精度,直到定位精度满足要求为止。
[0069]
至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征作出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1