利用带绞盘无人机的空地一体化海水养殖水质监测方法
1.本发明属于利用特殊方法进行测量技术领域,具体为一种利用带绞盘无人机的空地一体化海水养殖水质监测方法。
背景技术:
2.我国海水养殖业是以对虾养殖为代表的传统的海水池塘养殖方式,其特点是靠大换水、大量投饵、高密度和单一养殖品种;这样的养殖结果是使养殖海区富营养化,生物区系改变,赤潮频发,鱼贝病害逐年增多、加重、致使部分省份甚至绝产,养殖业损失惨重。
3.灾难的起因及其揭示的问题是:1、迄今海水养殖品种单一,池塘生态系过于简单,自动平衡能力低,因此池水易恶化,所以要靠换水和排水加以支持;2、完全依靠投饵取得产量,加以密养,高投饵,所以池水污染严重,构成了暴发虾病的基本原因,此外,排水对浅海的污染也极严重,又构成了暴发赤潮的基本原因。
4.而水质监测是指对水中的化学物质、悬浮物、底泥和水生态系统进行统一的定时或不定时的检测,监视和测定水体中污染物的种类,浓度及变化趋势,评价水质状况等工作。目的是准确、及时、全面地反映水质现状及发展趋势,为水环境管理、污染源控制、环境规划等提供科学依据。水质监测主要是检验水质指标是否符合水质标准。水质指标是描述水质量的参数,通常用水中杂质的种类,成分和数量来表示。水质指标项目繁多,因用途的不同而各异,其中有些水质指标从名称就可以看出具体的杂质成分,如汞、镉、砷、硝酸根、氰化物、dtt等。有些水质指标反映了着干杂质成分的共同影响结果,如碱度、硬度等。有些水质指标则是许多污染杂质的综合性指标,如浑浊度、生化需氧量、化学需氧量等等。
5.目前现有的水质监测指标可分为两大类:一类是反映水质状况的综合指标,如温度、色度、浊度、ph值、电导率、悬浮物、溶解氧化学需氧量和生物需氧量等;另一类是一些有毒物质,如酚、砷、铅、铭、镉、汞和有机农药等。水质监测范围十分广泛,包括未被污染和已受污染的天然水(江、河,湖,梅和地下水)及各种各样的工业排水等。水质监测可以通过化学法,电化学法,原子吸收分光光度法,离子色谱法,气相色谱等方法进行。其中,化学法在国内外水质常规监测中被普遍采用。
6.但目前所使用的水质监测主要存在以下问题:1、采样过程中的技术问题。在样品采集过程中,采样断面与采样点位的布设,样品采集频率与方法的确定,样品装置容器的选取与洗涤,样品采集后的预处理,样品保存与运输等技术。如果把握不当,都极容易出问题,对样品的代表性与完整性产生基础性的影响,例如在测定含油水域中,为测定水中乳化状态与溶解性油采样时,没有避开漂浮在水表面的油膜。2、实验室的环境条件问题。样品采集后要进入实验室分析,在实验室中,如果室内的温度,湿度,清洁度与采光等条件控制不好,或者出现振动、噪声以及辐射等特殊因素,都会对分析仪器的精确度产生影响,进而影响到最終的监测结果。3、分析仪器及试剂的问题。在分析仪器方面,如果仪器的测量范围不够大,灵敏性较低,在测量样品时,其测量准确度就会较低,误差较大。在试剂方面,如果使用的试剂纯度精度达不到要求时或所使用的纯水的纯度达不到要求时,都会导致配制的试剂
存在浓度误差。4、监测方法的问题。在水质监测方法选用方面,我们常因为没有根据待测物水域性质及所用仪器的类型选取恰当的方法,造成准确度与精密度的误差较大,且检出限也存在高低不匀现象。
7.特别是在在大范围监测中,传统的单点测量模式效率低下,对于人力物力需求较高,难以满足实际需要。随着近些年无人机倾斜摄影与三维激光扫描技术的快速发展与广泛应用,这个难题在一定程度上得到了解决,不过单项技术独立用于监测仍然存在一些不足。
8.针对海水和半咸水鱼类池塘因集约化养殖密度大、水面能见度低和水质控制难度大等导致的单点采样水质智能监测难的突出问题,本发明提出了一种利用带绞盘无人机的空地一体化海水养殖水质监测方法,集成多参数传感器用于感知海水池塘的水质信息,通过研究池塘布局选择不同监测点,使用浮标式水质监测系统实时准确定位并监测不同深度等海水池塘内的水质参数,提升养殖装备智能化水。
技术实现要素:
9.针对背景技术中存在的问题,本发明提供了一种利用带绞盘无人机的空地一体化海水养殖水质监测方法,所述带绞盘无人机包括:无人机、绳索、浮标、传感器、基站、绞盘和服务器,其中基站设置于海水或半咸水鱼类池塘附近,基站与服务器相连,无人机下方设有绞盘,绞盘上缠绕有绳索,绳索的下端安装有多参数水质传感器,多参数水质传感器上方等间距设有至少两个浮标,在最下方浮标和下方第二浮漂上分别安装有第一液位传感器和第二液位传感器,均与相连的多参数水质传感器中的lora模块相连;多参数水质传感器上还安装有:第三液位传感器;
10.其特征在于,所述监测方法包括:
11.步骤1、将各组件集成到多参数水质传感器中,通过可视化上位机设置软件;将绞盘收回至接触到最上方的浮漂处;
12.步骤2、无人机根据自带的定位模块核对位置并停留在目标位置,并悬停在目标位置(采集点)上方;
13.步骤3、根据当前目标位置的设定深度;先对目前所处的当前深度进行确认,随后将多参数水质传感器收放至设定深度;
14.步骤4、通过多参数水质传感器中的监测芯片,进行各种参数信息的采集;
15.步骤5、将参数信息结果通过lora模块转换成lora信号后,lora传输天线将信息传输到总站,将检测的参数通过开放的接口上传到服务器的数据库中,达到手动设置好的停飞点工作目标之后进入步骤6;
16.步骤6、如预先设置采集进程的下一步为在该目标位置进行不同深度的采集,直接收放绞盘并返回步骤4继续采集进程;如果预先设置的下一步为在不同的目标位置进行不同深度的采集,返回步骤2;直至全部目标结束或需要召回无人机时,将无人机召回至维护点;手动选择悬停模式时,无人机维持高度并待机;
17.所述步骤3包括:
18.步骤301、无人机先进行基准高度核准,将绞盘放出,至第一液位传感器发出信号后绞盘停止并进入步骤302;
19.步骤302、监测30秒-1分钟内的第一液位传感器和第三液位传感器传送出的信号并选出平均值作为第一核准深度,将第一核准深度和通过lora模块传送给服务器中的上位机并记录;
20.步骤303、无人机维持高度,绞盘继续放出,直至下方第二浮漂上的第二液位传感器没入水中传来信号后,监测30秒-1分钟内的第二液位传感器和第三液位传感器传送出的信号并选出平均值作为第二核准深度,将第二核准深度和通过lora模块传送给服务器中的上位机并记录;
21.步骤304、无人机维持高度,将第一核准深度和第二核准深度两次返回的比对信号进行比较,确认无误后;计算设定深度与第二浮漂间的距离,计算绞盘的转动时间并将信号传送给无人机上的下位机,继续收放绞盘直至达到目标位置的设定深度,步骤3结束。
22.在步骤301的绞盘放出之前,如果无人机反馈的现有高度超过最下方浮标可以放出的最大长度时,下降无人机至第一液位传感器发出信号后停止下降并进入步骤302。
23.在第一核准深度和第二核准深度信号采集的过程中,如因浪过大导致第一液位传感器或第二液位传感器收集到的信号低于覆盖时间t时,则下降10公分继续进行步骤302或步骤303;
24.所述覆盖时间t=1-pl
fs
(d,f)+a*d
25.其中,自由空间损耗pl
fs
(d,f)=20lg*d+20lg*f+32.4,d为传播路径;f为电波频率,单位为;模型系数a=0.47。
26.所述参数信息为浊度、ph、溶解氧、温度和三氮值信息。
27.所述停飞点工作目标为多参数水质传感器中的全部数据均收集完毕,或者停留并收集等于已设定目标时间的数据。
28.本发明的有益效果在于:
29.1.本发明利用无人机和传感器等设备实现了空地一体化,且无人机可以在海水池塘做往复运动,从而使传感器可以接触不同远近水域的水体,测量不同位置的水域参数。
30.2.本发明利用绞盘与绳索将无人机和传感器相连,通过位于绳索上不同位置的液位传感器和算法反馈并控制传感器测量的深度,绳索上附带的浮标和深度传感器之间的交互可以清晰反应传感器监测的不同深度,从而准确对浑浊水情下各位置的不同数据进行记录。
31.3.本发明利用lora传输天线将监测结果实时传输到总站,避免了手动记录带来的麻烦,且提高了监测人员的工作效率。
附图说明
32.图1为本发明一种利用带绞盘无人机的空地一体化海水养殖水质监测方法中带绞盘无人机实施例的结构示意图;
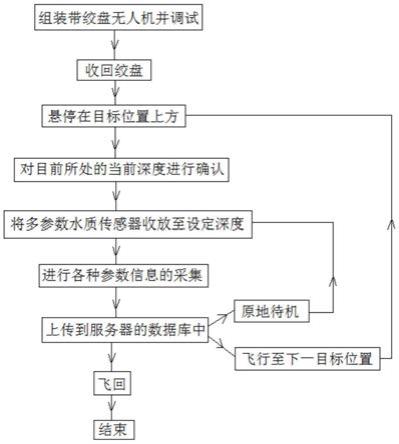
33.图2为本发明实施例的流程简图。
34.其中:1-无人机,2-绳索,3-浮标,4-传感器,5-基站,6-服务器。
具体实施方式
35.以下结合附图对本发明作进一步的详细说明。
36.如图1所示的本发明实施例中所使用的带绞盘无人机包括:无人机1、绳索2、浮标3、传感器4、基站5、绞盘(图中被遮挡)和服务器6,其中基站5设置于海水或半咸水鱼类池塘附近,基站5与服务器6相连,无人机1下方设有绞盘,绞盘上缠绕有绳索2,绳索2的下端安装有多参数水质传感器4,多参数水质传感器4上方等间距设有至少两个浮标3,在最下方浮标和下方第二浮漂上分别安装有第一液位传感器和第二液位传感器,均与相连的多参数水质传感器中的lora模块相连;多余的浮漂用于肉眼观测。
37.多参数水质传感器上还安装有包括:第三液位传感器、浊度探头、ph传感器、溶解氧传感器、温度传感器和三氮含量监测器。
38.在本实施例中,无人机1为六旋翼无人机,有效载荷为10kg,支持ab点模式,采用植保专用飞控;可选配rtk定位,精度高达厘米级;
39.在本实施例中,所使用的lora模块的灵敏度-148dbm,通讯距离大于10千米,解决了无人机设备功耗和传输距离不能兼得的难题,在实际应用中有非常大的应用空间;二是易于建设和部署,免牌照频段节点,lora模块极低的成本,会在未来大规模推广中占据巨大优势;三是自带电池寿命长,lora模块的接收电流10ma,休眠电流小于200na,电池寿命长达5年。采用lora无线技术解决数据传输问题,利用lora wan组建通信拓扑网络,实现海水池塘区域内无线信号的全覆盖。其中lora无线技术的工作方式具体为:class-a,等同于nb-iot psm模式;多参数水质传感器中的(物联网终端)主动发消息给基站,基站才能找得到终端,并且下发控制指令,即终端发数据的时候才能接收。或class-c,等同于nb-iot的drx模式或socket长连接;物联网终端和基站之间一直保持紧密联系,基站随时都能给终端下发控制指令。即终端随时都可以接收。
40.在本实施例中,浊度探头配置了自动清洁装置;
41.在本实施例中,等间距设有四个浮标3,间距为50cm,最下方浮标与多参数水质传感器4的距离为50cm;实际需检测深度(设定深度)的范围通常为50cm~500cm。
42.在本实施例中,服务器6可外置配套可视化上位机设置软件,从而直观的对波特率、目标位置、设定深度和目标时间等控制数据进行自由设置;同时,服务器6可直接与工控机、plc等任意一种符合modbus rtu格式的通讯设备构成采集系统。
43.本实施例中的空地一体化海水养殖水质监测方法包括:
44.步骤1、将各组件集成到多参数水质传感器中,调试完毕后通过可视化(显示屏)上位机设置软件,具体为地址、范围、波特率等数据;将绞盘收回至接触到最上方的浮漂3处。
45.步骤2、无人机根据自带的rtk定位模块核对位置并停留在目标位置,并悬停在目标位置(采集点)上方。
46.步骤3、根据当前目标位置的设定深度;先对目前所处的当前深度进行确认,随后将多参数水质传感器收放至设定深度。
47.步骤4、通过多参数水质传感器中的监测芯片,进行各种参数信息的采集。
48.步骤5、将参数信息结果通过lora模块转换成lora信号后,lora传输天线将信息传输到总站,将检测的参数通过开放的接口上传到服务器的数据库中,达到手动设置好的停飞点工作目标之后进入步骤5。
49.步骤6、如预先设置采集进程的下一步为在该目标位置进行不同深度的采集,直接收放绞盘并返回步骤4继续采集进程;如果预先设置的下一步为在不同的目标位置进行不
同深度的采集,返回步骤2;直至全部目标结束或需要召回无人机时,将无人机召回至维护点;手动选择悬停模式时,无人机维持高度并待机。
50.步骤3中,包括:
51.步骤301、无人机先进行基准高度核准,将绞盘放出,至第一液位传感器发出信号后绞盘停止并进入步骤302;
52.步骤302、监测30秒-1分钟内的第一液位传感器和第三液位传感器传送出的信号并选出平均值作为第一核准深度,将第一核准深度和通过lora模块传送给服务器中的上位机并记录;
53.步骤303、无人机维持高度,绞盘继续放出,直至下方第二浮漂上的第二液位传感器没入水中传来信号后,监测30秒-1分钟内的第二液位传感器和第三液位传感器传送出的信号并选出平均值作为第二核准深度,将第二核准深度和通过lora模块传送给服务器中的上位机并记录;
54.步骤304、无人机维持高度,将第一核准深度和第二核准深度两次返回的比对信号进行比较,从而尽量避免能见度较低水下复杂情况对实际深度测量的干扰,确认无误后;计算设定深度与第二浮漂间的距离,计算绞盘的转动时间并将信号传送给无人机上的下位机,继续收放绞盘直至达到目标位置的设定深度,步骤3结束。
55.在步骤301的绞盘放出之前,如果无人机反馈的现有高度超过最下方浮标3可以放出的最大长度时,下降无人机至第一液位传感器发出信号后停止下降并进入步骤302。
56.在第一核准深度和第二核准深度信号采集的过程中,如因浪过大导致第一液位传感器或第二液位传感器收集到的信号低于覆盖时间t时,则下降10公分继续进行步骤302或步骤303;
57.所述覆盖时间t=1-pl
fs
(d,f)+a*d
58.其中,自由空间损耗pl
fs
(d,f)=20lg*d+20lg*f+32.4,d为传播路径;f为电波频率,单位为;模型系数a=0.47。
59.在本实施例中,具体计算出的损耗在10%左右,信号覆盖率要求为90%左右。
60.在本实施例中,步骤4采集的参数信息为全部传感器的浊度、ph、溶解氧、温度和三氮值,容易理解的是,也可以选择具体某种或多种数据进行采集。
61.在步骤5中的停飞点工作目标为多参数水质传感器中的全部数据均收集完毕,或者停留并收集等于已设定目标时间的数据。
62.在本发明所提供的步骤中,如果需要在过程中针对同一目标位置插入采集进程,由于之前已经过确认,因此可以无需肉眼确认可直接输入深度并进行新的采集进程;
63.特别是在海水池塘的作业水质环境中,一般比较浑浊,可见度较低,不同层之间水质差异较大,因此主要对于不同深度的水质检测很频繁,而负重无人机本身悬停的位置比较飘忽,本发明所提供的方法可以提供极大的便利。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1