跌落测试机的制作方法
1.本发明涉及产品跌落测试技术领域,特别是跌落测试机。
背景技术:
2.随着科学技术的快速发展,手机、mp4、平板电脑等电子产品逐步进入到人们的生活中;电子产品内设置有多个电子元件,电子产品在使用过程中经常遇到意外跌落、意外冲击及意外震荡的情况,如果电子产品结构不够牢固,容易使电子产品内电子元件出现位移,进而造成短路,缩短电子产品的使用寿命,甚至造成电子产品的爆炸,所以电子产品在使用过程中可靠性能尤其重要;为检验电子产品在组装过程中各连接器件及焊线是否有脱落现象以及评估电子产品在跌落时所能承受的坠落高度及耐冲击强度,需要模拟产品在不同的高度跌落于地面时的情况,现有技术一般是定制一高度由人工按操作规范让其自由落下,但是这种方法耗时、效率低下、劳动强度大,且由于人工操作方式各异会导致每次跌落测试的初始条件不同,导致操作不标准。
3.鉴于上述情况,有必要对现有的跌落测试机构加以改进,使其能够适应现在对产品跌落测试使用的需要。
技术实现要素:
4.由于目前对于产品进行跌落测试使用效果不佳,效率比较低,并且需要人工按照操作规范来进行跌落,但是由于每个人工操作方式不可能完全一样,因此在此过程中产生的差别会导致每次跌落测试的初始条件均不同,从而造成操作不标准,不能满足人们长久使用的需要,因此我们在现有技术缺陷的基础上设计了一种跌落测试机,效率高,并且无需人工接触产品,就可完成对产品的跌落测试,使用效果佳,操作方便。
5.实现上述目的本发明的技术方案为,跌落测试机,包括支撑框架,所述支撑框架上包括上料机构、设置于上料机构一侧的夹取机构、设置于夹取机构一侧的收容框、设置于收容框上方的摄像识别机构、设置于夹取机构一侧的精定位机构、设置于收容框一侧的跌落机构、设置于精定位机构一侧的下料机构。
6.对本技术方案的进一步补充,所述上料机构其上设有若干用于放置产品的空腔,所述上料机构采用伺服驱动。
7.对本技术方案的进一步补充,所述夹取机构包括机器人本体、设置于机器人本体机械臂末端的抓取机构,所述机器人本体固定安装于支撑框架上,所述抓取机构与机器人本体机械臂末端固定连接。
8.对本技术方案的进一步补充,所述抓取机构包括夹爪抓取机构和吸附机构,所述夹爪抓取机构和吸附机构分别安装于机器人本体机械臂末端左右两侧。
9.对本技术方案的进一步补充,所述摄像识别机构固定安装于支撑框架上方且其对准下方的收容框。
10.对本技术方案的进一步补充,所述精定位机构包括设置于四周的支撑柱、设置于
支撑柱上方的底板、设置于底板上方的横向限位机构和纵向限位机构。
11.对本技术方案的进一步补充,所述横向限位机构包括第一固定板、设置于第一固定板相对一侧的第一推紧板、与第一推紧板连接的第一限位气缸,所述第一固定板固定安装于底板上,所述第一推紧板顶靠在底板上且与其滑动接触,所述第一限位气缸固定安装于底板上。
12.对本技术方案的进一步补充,所述纵向限位机构包括第二固定板、与第二固定板相对的第二推紧板、与第二推紧板连接的第二限位气缸,所述第二固定板与第一固定板、第一推紧板垂直设置,所述第二推紧板与第一固定板、第一推紧板垂直设置,所述第二固定板固定安装于底板上,所述第二推紧板顶靠在底板上且与其滑动接触,所述第二限位气缸固定安装于底板上。
13.对本技术方案的进一步补充,所述跌落机构包括固定架、设置于固定架上的提升机构、与提升机构连接的夹持机构,所述固定架安装于支撑框架上,所述夹持机构包括左夹持机构与右夹持机构,所述左夹持机构与右夹持机构对称设置于固定架的左右两侧,其采用气缸驱动。
14.对本技术方案的进一步补充,所述下料机构上设有若干用于放置产品的空腔,所述下料机构采用伺服驱动。
15.其有益效果在于,通过上料机构、夹取机构、摄像识别机构、精定位机构、跌落机构、下料机构配合能够很好地完成对产品的上料、夹取、摄像识别、精定位、跌落测试、摄像再识别、下料,使用方便,能够根据人们的使用需要对产品进行多个角度的跌落测试,便于更好地测试产品的结构牢固性,效率高。
附图说明
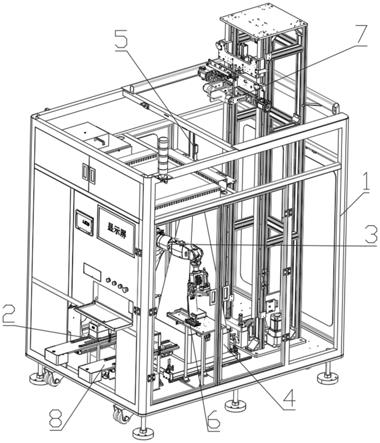
16.图1是本发明的整体结构示意图;
17.图2是本发明内部工作结构示意图;
18.图3是本发明精定位机构的结构示意图;
19.图4是本发明夹取机构的结构示意图;
20.图中,1、支撑框架;2、上料机构;3、夹取机构;31、机器人本体;32、抓取机构;321、夹爪抓取机构;322、吸附机构;4、收容框;5、摄像识别机构;6、精定位机构;61、支撑柱;62、底板;63、横向限位机构;631、第一固定板;632、第一推紧板;633、第一限位气缸;64、纵向限位机构;641、第二固定板;642、第二推紧板;643、第二限位气缸;7、跌落机构;71、固定架;72、提升机构;73、夹持机构;731、右夹持机构;732、左夹持机构;8、下料机构。
具体实施方式
21.由于目前对于产品进行跌落测试使用效果不佳,效率比较低,并且需要人工按照操作规范来进行跌落,但是由于每个人工操作方式不可能完全一样,因此在此过程中产生的差别会导致每次跌落测试的初始条件均不同,从而造成操作不标准,不能满足人们长久使用的需要,因此我们在现有技术缺陷的基础上设计了一种跌落测试机,效率高,并且无需人工接触产品,就可完成对产品的跌落测试,使用效果佳,操作方便。
22.为了便于本领域技术人员对本技术方案更加清楚,下面将结合附图1-4详细阐述
本发明的技术方案:跌落测试机,包括支撑框架1,所述支撑框架1上包括上料机构2、设置于上料机构2一侧的夹取机构3、设置于夹取机构3一侧的收容框4、设置于收容框4上方的摄像识别机构5、设置于夹取机构3一侧的精定位机构6、设置于收容框4一侧的跌落机构7、设置于精定位机构6一侧的下料机构8;工作时,上料机构2能够对产品进行上料,然后夹取机构3将上料机构2中的产品进行夹取放置到收容框4中,此时摄像识别机构5对收容框4中的产品的位置及状态进行记录,然后通过夹取机构3将收容框4的中产品夹取放置到精定位机构6上进行精定位,定位完成后,通过夹取机构3将产品夹持然后放置到跌落机构7上,此时跌落机构7将产品进行夹持然后提升至指定高度,松开产品,使得产品自由跌落至收容框4中,然后摄像识别机构5对收容框4中的产品位置及状态进行再记录,其中,人们可根据需要对产品进行多次不同角度及位置的跌落,待测试完毕后,通过夹取机构3将收容框4中的产品夹持然后放入至下料机构8中,出料取出即可。
23.其中,所述上料机构2其上设有若干用于放置产品的空腔,所述上料机构2采用伺服驱动;同样地,所述下料机构8上设有若干用于放置产品的空腔,所述下料机构8采用伺服驱动。
24.下面将对夹取机构3的结构做详细地阐述,所述夹取机构3包括机器人本体31、设置于机器人本体31机械臂末端的抓取机构32,所述机器人本体31固定安装于支撑框架1上,所述抓取机构32与机器人本体31机械臂末端固定连接,其中机器人本体31为六轴机器人,活动自由度高,能够更好地满足企业的使用需要,从而更好地对产品进行夹取,其中,由于产品需要进行多角度及多位置的测试,因此我们对抓取机构32进行了再改进,其包括夹爪抓取机构321和吸附机构322,所述夹爪抓取机构321和吸附机构322分别安装于机器人本体31机械臂末端左右两侧,其中吸附机构322主要作用于对产品进行测试产品前后尺寸比较宽的,而夹爪抓取机构321适应的情况更多一点,设置两者的目的是为了更好地对产品进行夹持,然后更好地放置于跌落机构7上,无需反复调整。
25.下面将对摄像识别机构5的结构做详细地阐述,所述摄像识别机构5固定安装于支撑框架1上方且其对准下方的收容框4,从而能够更好地产品的位置及状态进行摄像识别,便于人们后续进行使用。
26.下面将对精定位机构6的结构做详细地补充,所述精定位机构6包括设置于四周的支撑柱61、设置于支撑柱61上方的底板62、设置于底板62上方的横向限位机构63和纵向限位机构64;其中,横向限位机构63包括第一固定板631、设置于第一固定板631相对一侧的第一推紧板632、与第一推紧板632连接的第一限位气缸633,所述第一固定板631固定安装于底板62上,所述第一推紧板632顶靠在底板62上且与其滑动接触,所述第一限位气缸633固定安装于底板62上;其中,第一限位气缸633能够控制第一推紧板632移动,从而与第一固定板631配合能够对产品的横向进行定位;其中,所述纵向限位机构64包括第二固定板641、与第二固定板641相对的第二推紧板642、与第二推紧板642连接的第二限位气缸643,所述第二固定板641与第一固定板631、第一推紧板632垂直设置,所述第二推紧板642与第一固定板631、第一推紧板632垂直设置,所述第二固定板641固定安装于底板62上,所述第二推紧板642顶靠在底板62上且与其滑动接触,所述第二限位气缸643固定安装于底板62上;第二限位气缸643能够驱动第二推紧板642移动,进而与第二固定板641配合能够对产品进行纵向定位,然后与第一固定板631、第一推紧板632配合从而能够对产品的四周进行定位,使用
效果佳,能够满足人们的使用需要。
27.下面将对跌落机构7的结构做详细地补充,所述跌落机构7包括固定架71、设置于固定架71上的提升机构72、与提升机构72连接的夹持机构73,所述固定架71安装于支撑框架1上,所述夹持机构73包括左夹持机构732与右夹持机构731,所述左夹持机构732与右夹持机构731对称设置于固定架71的左右两侧,其采用气缸驱动;工作时,提升机构72能够带动夹持机构73上下移动,从而移动至合适的高度,然后夹持机构73上的左夹持机构732与右夹持机构731能够对经夹取机构3夹取后的产品进行夹持,夹持后移动至需要的高度,然后左夹持机构732、右夹持机构731松开产品,使得产品自由跌落至收容框4中,然后摄像识别机构5能够对产品的位置、状态进行摄像,上述过程可根据对产品的测试需要进行循坏,直至满足对产品的测试,然后通过夹取机构3将收容框4中的产品夹取放置到下料机构8上即可,便于人们进行使用,跌落测试效果佳。
28.上述技术方案仅体现了本发明技术方案的优选技术方案,本技术领域的技术人员对其中某些部分所可能做出的一些变动均体现了本发明的原理,属于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1