建筑物沉降监测的误差自动校准装置及方法与流程
1.本发明涉及工程测量技术领域,尤其涉及一种建筑物沉降监测的误差自动校准装置及方法。
背景技术:
2.随着我国经济建设的发展以及工程施工技术水平的不断提高,对现在建筑工程的施工要求与质量保障也越来越高,安全方面的自动化监测不容忽视。差压式静力水准仪利用液体压强原理,用来测量两点和多点之间的沉降情况。根据液体压强原理,静力水准仪在各个测量点所处位置高低不同,导致各测量点液体压强不同,根据物理学公式f=ps=ρghs,可以换算出液体高度,可以在大型建筑物,包括路基、地铁、深基坑、大坝等结构物的沉降自动化监测方面应用。
3.然而,在实际过程测量中,由于工作环境条件中存在大气压、湿度、温度等变化,会导致液体密度ρ和重力加速度g改变,例如,液体种类、温度、液体挥发、液体变质等因素都会导致液体密度ρ改变,而不同海拔高度、不同纬度也会导致重力加速度发生改变,而现有的差压式静力水准仪在计算沉降值时,大多采用固定的液体密度值和重力加速度,例如,将水的密度设置为1g/cm3,重力加速度设置为9.80m/s2,这就会导致测量结果与实际值之间的误差较大,测量精度低,不能准确监测施工过程中或是使用过程中建筑物沉降与倾斜,不能保障建筑物的质量与人员的安全。
4.现有公开号为cn107289906a的中国专利公开了一种压差式静力水准仪自动监测系统,包括现场采集装置、远程监测系统和静力水准仪,静力水准仪与现场采集装置相连,远程监测系统控制现场采集装置;静力水准仪包括置于第一基准点的第一基准点水准仪、置于第二基准点的第二基准点水准仪和置于待测试点的测量点水准仪,第一基准点和第二基准点相对位移固定。该监测系统通过两个基准点的设置消除温度对水压测量值的影响。该方案是将两个静力水准仪作为两个基准点(没有沉降的位置),两个基准点的相对位移固定,从而消除温度对水的密度变化的影响。但是,这种方式在实际应用中至少存在以下缺点:1、在非沉降位置安装两个静力水准仪非常耗时耗力,且两者之间的相对位移需要人工测定,会受到人为影响,导致与理论设定不符。
5.2、该方案中,增加了一套基准静力水准仪,导致设备成本以及辅材安装成本增加。
6.3、该方案中只考虑了液体密度的变化,并未考虑到重力加速度的变化,监测结果仍然会存在不准确的因素。
7.4、由于现场外部破坏、安装不良等原因,导致静力水准仪系统出现微漏液或快速漏液的现象,而储液箱的位置往往是高于静力水准仪的,只有当静力水准仪中液体都漏光而导致监测数据异常时,后台监测系统才会发现异常(需要数据分析人员及时观察数据),而此时整个系统都会处于瘫痪状态,甚至会产生错误的沉降预警(部分测点有液、部分测点无液),增加监测分析工作与施工难度,并且会导致整个系统的使用寿命缩短。
技术实现要素:
8.本发明要解决的技术问题是:为了解决现有技术中的建筑物沉降监测结果不准确的技术问题。本发明提供一种建筑物沉降监测的误差自动校准装置及方法,通过在储液箱内部设置具有高度差的两个测压单元,能够获得液体密度和重力加速度的乘积值,并将这个乘积值赋予后续的监测系统中,能够消除外界环境变化对液体密度及重力加速度的影响,保证沉降监测结果的准确性。
9.本发明解决其技术问题所采用的技术方案是:一种建筑物沉降监测的误差自动校准装置,其特征在于,采用储液箱、基准静力水准仪及测量静力水准仪,所述储液箱与所述基准静力水准仪连通,所述基准静力水准仪与所述测量静力水准仪连通;所述储液箱内部装有液体,所述液体的密度为ρ;所述储液箱内部设有第一测压单元和第二测压单元,所述第一测压单元和第二测压单元浸没在液体中,所述第一测压单元距离所述储液箱下表面的高度为h1,第二测压单元距离所述储液箱下表面的高度为h2,|h1‑
h2|=δh,δh>0。
10.进一步地,所述第一测压单元与第二测压单元在储液箱下表面的正投影是不重叠的。
11.进一步地,所述储液箱的上表面为阶梯形,其包括第一上台阶面、第二上台阶面及第三上台阶面,所述第一上台阶面与所述储液箱下表面之间的距离为h1,所述第二上台阶面与所述储液箱下表面之间的距离为h2,所述第三上台阶面与所述储液箱下表面之间的距离为h3,h1>h2>h3;所述第一测压单元安装于所述第二上台阶面的内表面,所述第二测压单元安装于所述第三上台阶面的内表面。
12.进一步地,所述储液箱的下表面为阶梯形,其包括第一下台阶面、第二下台阶面及第三下台阶面,所述第一下台阶面与所述储液箱上表面之间的距离为h4,所述第二下台阶面与所述储液箱上表面之间的距离为h5,所述第三下台阶面与所述储液箱上表面之间的距离为h6,h4>h5>h6;所述第一测压单元安装于所述第二下台阶面的内表面,所述第二测压单元安装于所述第三下台阶面的内表面。
13.进一步地,所述储液箱的上表面为凹凸状,其包括第一凸起部、第二凸起部及第三凸起部,所述第一凸起部顶面与所述储液箱下表面之间的距离为h7,所述第二凸起部顶面与所述储液箱下表面之间的距离为h8,所述第三凸起部顶面与所述储液箱下表面之间的距离为h9,h7>h8>h9;所述第一测压单元安装于所述第二凸起部顶部的内表面,所述第二测压单元安装于所述第三凸起部顶部的内表面。
14.进一步地,所述储液箱内部的液体为水、防冻液或二甲基硅油。
15.一种建筑物沉降监测的误差校准方法,采用如上所述的建筑物沉降监测的误差自动校准装置,包括以下步骤:s1:将储液箱和基准静力水准仪均设置在基准位置点,且储液箱所在的位置高于基准静力水准仪所在的位置,测量静力水准仪设置于建筑物的待测位置,测量静力水准仪所在的位置低于储液箱所在的位置;设储液箱内的液体高度为h*;s2:实时采集第一测压单元监测到的第一压力值f1=ρg(h*
‑
h1)s,实时采集第二测压单元监测到的第二压力值f2=ρg(h*
‑
h2)s,根据|f1
‑
f2|=|ρg(h*
‑
h1)s
‑
ρg(h*
‑
h2)s|=ρgs|
h2‑
h1|=ρgsδh,得到,其中s为受力面积,g为所述储液箱所在地的重力加速度;s3:采集基准静力水准仪监测到的第三压力值f3,基准静力水准仪内的液位高度为h3,采集测量静力水准仪监测到的第四压力值f4,测量静力水准仪内的液位高度为h4,利用步骤s2中得到的ρg乘积值,根据公式f3
‑
f4=ρgh3s
‑
ρgh4s=ρgs(h3‑
h4),得到,即测得建筑物待测位置相对于基准位置的沉降值。
16.进一步地,步骤s2中,上一时刻计算得到的ρg乘积值将更新为当前时刻计算得到的ρg乘积值,再执行步骤s3。
17.本发明的有益效果是,本发明的建筑物沉降监测的误差自动校准装置及方法,通过在储液箱内安装两个测压单元,可以得到两个测压单元输出的压力差|f1
‑
f2|,并且两个测压单元之间具有高度差δh,δh为已知量,结合压力差|f1
‑
f2|和高度差δh可以计算出液体密度ρ和重力加速度g的乘积值,并将该乘积值应用于整个沉降监测系统,从而可以防止外界环境对沉降值监测的影响,大大提高了压差式静力水准仪系统监测的精度。
附图说明
18.下面结合附图和实施例对本发明进一步说明。
19.图1是现有技术中的储液箱结构示意图。
20.图2是本发明的建筑物沉降监测的误差自动校准装置的结构示意图。
21.图3是本发明的测压单元的一种结构示意图。
22.图4是本发明的测压单元的另一种结构示意图。
23.图5是本发明的第一种储液箱的结构示意图。
24.图6是本发明的第二种储液箱的结构示意图。
25.图7是本发明的第三种储液箱的结构示意图。
26.图8是本发明的建筑物沉降监测的误差自动校准方法的流程图。
27.图中:1、储液箱,2、基准静力水准仪,3、测量静力水准仪,4、第一测压单元,5、第二测压单元,11、第一上台阶面,12、第二上台阶面,13、第三上台阶面,14、第一下台阶面,15、第二下台阶面,16、第三下台阶面,17、第一凸起部,18、第二凸起部,19、第三凸起部,41、陶瓷壳体,42、电阻应变片,43、电信号采集模块一,44、电桥传感器,45、膜片,46、电信号采集模块二,47、密封保护层,48、油,49、壳体。
具体实施方式
28.现在结合附图对本发明作进一步详细的说明。这些附图均为简化的示意图,仅以示意方式说明本发明的基本结构,因此其仅显示与本发明有关的构成。
29.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时
针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,除非另有说明,“多个”的含义是两个或两个以上。
30.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
31.静力水准仪是测量高差及其变化的精密仪器,可以安装在被测物体等高的测墩上或被测物体墙壁等高线上,通过现场采集箱内置单机版采集软件实现自动采集数据并存储于现场采集系统内,再通过有线或无线通讯与互联网相连进而传到后台软件,从而实现自动化观测。
32.实施例一如图2所示,一种建筑物沉降监测的误差自动校准装置,采用储液箱1、基准静力水准仪2及测量静力水准仪3,储液箱1与基准静力水准仪2连通,基准静力水准仪2与测量静力水准仪3连通。储液箱1内部装有液体,液体的密度为ρ。储液箱1内部设有第一测压单元4和第二测压单元5,第一测压单元4和第二测压单元5浸没在液体中,第一测压单元4距离储液箱1下表面的高度为h1,第二测压单元5距离储液箱1下表面的高度为h2,|h1‑
h2|=δh,δh>0。在本实施例中,储液箱1和基准静力水准仪2的数量均为一个,测量静力水准仪3的数量为多个,多个测量静力水准仪3之间采用连通管依次连通,其中一个测量静力水准仪3与基准静力水准仪2采用连通管相连通,基准静力水准仪2采用连通管与储液箱1相连通,储液箱1内的液体可以通过连通管流入基准静力水准仪2和多个测量静力水准仪3内。储液箱1和基准静力水准仪2可以设置在基准位置点,例如是没有地质沉降的位置。多个测量静力水准仪3可以安装在建筑物的待测位置,需要注意的是,基准静力水准仪2的位置和测量静力水准仪3的位置均低于储液箱1的位置,但储液箱1、基准静力水准仪2和测量静力水准仪3内的液面高度是保持在同一水平面的。当某个监测点发生沉降时,测量静力水准仪随之沉降,但根据静力水准原理,该测量静力水准仪中的液体仍会保持在同一水平面上,但是该测量静力水准仪中的液位高度是发生了变化的,通过监测液位高度的变化,可以计算出监测点的沉降值。但是现有的静力水准仪监测装置无法对储液箱1内的液体密度ρ以及重力加速度g的变化进行监测,导致最后得到的沉降值与真实值之间误差较大。因此,本实施例在储液箱1内设置了第一测压单元4和第二测压单元5(而现有技术中的储液箱内是无测压单元的,请参考图1),第一测压单元4和第二测压单元5分别被安装于储液箱1内的不同位置,且两者具有高度差δh。需要注意的是,由于第一测压单元4和第二测压单元5是安装在储液箱1内部的,且需要与液体接触,因此,需要考虑测压模块的尺寸、安装方式、防护等级等因素。由于目前大多用户并不了解测压模块的底层原理,或者即使懂得底层原理,但没有能力进行研发并验证,因此,也不会想到将测压单元安装于储液箱内。并且,建筑沉降监测的整个系统涉及到测绘、土木工程、岩土工程、仪器仪表、微电子、机电等技术领域,对技术人员的专业
化要求更高。
33.在一实施例中,第一测压单元4与第二测压单元5在储液箱1下表面的正投影是不重叠的。也就是说,第一测压单元4与第二测压单元5在储液箱1内的安装位置在水平方向是错位的,这样可以防止两个测压单元之间相互干扰,提高检测的准确性。第一测压单元4与第二测压单元5是防水的,浸没在液体中,用于测量储液箱1内不同位置点的液压。第一测压单元4与第二测压单元5可以通过电缆与现场的数据采集仪信号连接,基准静力水准仪2和测量静力水准仪3也可以通过电缆与现场的数据采集仪信号连接。第一测压单元4和第二测压单元5优选为结构相同,例如可以是采用电阻式测压单元或者电容式测压单元。如图3所示,电阻式测压单元包括陶瓷壳体41、电阻应变片42、及电信号采集模块一43,电阻应变片42和电信号采集模块一43安装在陶瓷壳体41上,电阻应变片42与电信号采集模块一43之间相连,当液压改变时,电阻应变片42的电阻会变化,电阻的变化经电信号采集模块一43处理后以电信号的方式输出给现场数据采集仪。如图4所示,电容式测压单元包括电桥传感器44、膜片45、电信号采集模块二46、密封保护层47、油48及壳体49,电信号采集模块二46与电桥传感器44相连,膜片45和密封保护层47之间形成一个容置空间,用于填充油48,电桥传感器44的一部分浸没在油48中。膜片45是一种弹性元件,对作用在其上的两侧压力差产生相应变形位移,其位移与差压成正比,这种位移可以被电桥传感器44接收转变为电容变化,该电容变化传给电信号采集模块二46处理以电信号的方式输出给现场数据采集仪。
34.在一实施例中,如图5所示,储液箱1的上表面为阶梯形,其包括第一上台阶面11、第二上台阶面12及第三上台阶面13,第一上台阶面11与储液箱1下表面之间的距离为h1,第二上台阶面12与储液箱1下表面之间的距离为h2,第三上台阶面13与储液箱1下表面之间的距离为h3,h1>h2>h3;第一测压单元4安装于第二上台阶面12的内表面,第二测压单元5安装于第三上台阶面13的内表面。换言之,第一测压单元4和第二测压单元5之间的高度差δh=h2
‑
h3,h2和h3的大小在设计储液箱1结构参数时可以直接获得,不需要额外测量。并且,储液箱1内的液面高度要高于h2,使得第一测压单元4和第二测压单元5被完全浸没在液体中,从而能够测量出储液箱内不同液位高度的压力值。
35.在一实施例中,如图6所示,储液箱1的下表面为阶梯形,其包括第一下台阶面14、第二下台阶面15及第三下台阶面16,第一下台阶面14与储液箱1上表面之间的距离为h4,第二下台阶面15与储液箱1上表面之间的距离为h5,第三下台阶面16与储液箱1上表面之间的距离为h6,h4>h5>h6;第一测压单元4安装于第二下台阶面15的内表面,第二测压单元5安装于第三下台阶面16的内表面。换言之,第一测压单元4和第二测压单元5之间的高度差δh=h5
‑
h6,h5和h6的大小在设计储液箱1结构参数时可以直接获得,不需要额外测量,并且,储液箱1内的液面高度以能够浸没第二测压单元5为宜,使得第一测压单元4和第二测压单元5能够测量出储液箱内不同液位高度的压力值。
36.在一实施例中,如图7所示,储液箱1的上表面为凹凸状,其包括第一凸起部17、第二凸起部18及第三凸起部19,第一凸起部17顶面与储液箱1下表面之间的距离为h7,第二凸起部18顶面与储液箱1下表面之间的距离为h8,第三凸起部19顶面与储液箱1下表面之间的距离为h9,h7>h8>h9;第一测压单元4安装于第二凸起部18顶部的内表面,第二测压单元5安装于第三凸起部19顶部的内表面。换言之,第一测压单元4和第二测压单元5之间的高度差δh=h8
‑
h9,h8和h9的大小在设计储液箱1结构参数时可以直接获得,不需要额外测量,并
且,储液箱1内的液面高度要高于h8,使得第一测压单元4和第二测压单元5能够被浸没在液体中,从而可以测量到储液箱内不同液位高度的压力值。以上三种储液箱1的结构(阶梯形和凹凸状),可以使得两个测压单元安装地更加稳定,并且在外形上与普通的储液箱区别明显,便于工作人员现场安装时易于分辨,防止安装错误导致整个监测系统无法使用。
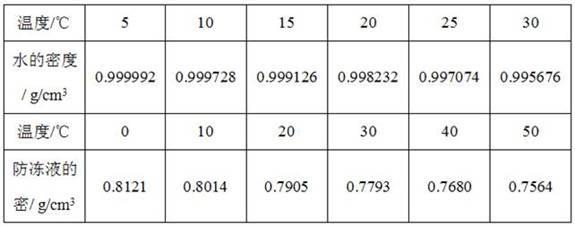
37.在本实施例中,储液箱1内部的液体可以是水、防冻液或二甲基硅油等,可以根据需要进行选择。但是随着时间推移,储液箱1内部的液体会因为环境温度、湿度、挥发等原因,造成液体密度ρ发生改变。例如表1所示,水和防冻液的密度会因为温度变化而变化。虽然密度变化值为微小的,但是如果仍然是按照设定的固定值来计算沉降值,会导致得到的沉降值产生误差。而地质或者建筑物的沉降会引起建筑物倾斜,破坏地基的稳定性,如果是靠近海边或者河边的建筑物,有可能会引起海水倒灌,造成财产损失和生命威胁,因此,沉降值监测的精准性对于预测和预报地面沉降工作至关重要。
38.表1实施例二如图8所示,本发明还提供了一种建筑物沉降监测的误差自动校准方法,具体包括以下步骤。
39.s1:将储液箱1和基准静力水准仪2均设置在基准位置点,且储液箱1所在的位置高于基准静力水准仪2所在的位置,测量静力水准仪3设置于建筑物的待测位置,测量静力水准仪3所在的位置低于储液箱1所在的位置,设储液箱1内的液体高度为h*(h*是指储液箱1内液体的最高点)。
40.s2:实时采集第一测压单元4监测到的第一压力值f1=ρg(h*
‑
h1)s,实时采集第二测压单元5监测到的第二压力值f2=ρg(h*
‑
h2)s,根据|f1
‑
f2|=|ρg(h*
‑
h1)s
‑
ρg(h*
‑
h2)s|=ρgs|h2‑
h1|=ρgsδh,得到,其中s为受力面积,g为储液箱1所在地的重力加速度。
41.s3:采集基准静力水准仪2监测到的第三压力值f3,基准静力水准仪2内的液位高度为h3,采集测量静力水准仪3监测到的第四压力值f4,测量静力水准仪3内的液位高度为h4,利用步骤s2中得到的ρg乘积值,根据公式f3
‑
f4=ρgh3s
‑
ρgh4s=ρgs(h3‑
h4),得到
,即测得建筑物待测位置相对于基准位置的沉降值。
42.需要说明的是,储液箱1和基准静力水准仪2所在的基准位置点是指没有沉降的位置点,作为对比的基准。储液箱1的高度要高于基准静力水准仪2和测量静力水准仪3,这样便于储液箱1内的液体流入静力水准仪内。第一测压单元4和第二测压单元5是实时采集储液箱1内不同液位的压力值f1和f2,f1=ρg(h*
‑
h1)s,f2=ρg(h*
‑
h2)s,|f1
‑
f2|=ρgsδh,其中s为受力面积(为固定值),g为重力加速度,而f1、f2、s及δh均为已知数据,从而可以得到。由于第一测压单元4和第二测压单元5是实时采集压力值f1和f2的,并将压力值f1和f2实时发送给现场的数据采集仪,数据采集仪再将数据发送给后台处理软件,那么后台处理软件可以实时计算出一个ρg的乘积值,当前时刻计算得到的ρg的乘积值可以替代上一时刻计算得到的ρg的乘积值,再执行步骤s3。这样,当储液箱1内的液体密度发生改变,或者重力加速度发生改变,或者两者同时发生改变时,能够及时计算出一个新的ρg的乘积值,并将这个新的ρg的乘积值用于后续的沉降值计算,这样能够保证沉降值的计算不受液体密度和重力加速度的影响,保证沉降值的准确性。
43.综上所述,本发明的建筑物沉降监测的误差自动校准装置及方法,通过在储液箱1内安装两个测压单元,可以得到两个测压单元输出的压力差|f1
‑
f2|,并且两个测压单元之间具有高度差δh,δh为已知量,结合压力差|f1
‑
f2|和高度差δh可以计算出液体密度ρ和重力加速度g的乘积值,并将该乘积值应用于整个沉降监测系统,从而可以防止外界环境对沉降值监测的影响,大大提高了压差式静力水准仪系统监测的精度。
44.此外,本发明还具有以下优点。
45.1、本发明的储液箱内的测压单元之间的高度差是根据储液箱的结构确定,不会受到人为因素干扰。
46.2、现场施工环境比较复杂,很难找到两个合适的基准点位置,且两个基准点之间的高度位置测定也比较困难,而本发明中,两个测压单元是安装在储液箱内的,安装过程简单,且两者之间的高度差也很容易测得。
47.3、本发明的测压单元除了提供压力差以外,还能够监测储液箱内液体的液位变化,防止漏液等情况出现,或者说当出现漏液情况时,能够及时发现,提醒工作人员及时补液。
48.4、本发明的储液箱安装于非沉降位置,测压单元安装于储液箱内,不需要额外再寻找其他基准位置,能够提高工作效率;测压单元安装于储液箱内还能够及时分辨出异常漏液与正常蒸发的区别,可以第一时间监测到异常的液体流失,及时进行预警,避免系统宕机和失效,使整个监测系统得到优化。
49.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要如权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1