一种确定无人机降落点的方法及装置与流程
本说明书涉及计算机,尤其涉及一种确定无人机降落点的方法及装置。
背景技术:
1、目前,无人机通常使用rtk(real-time kinematic,实时动态)载波相位差分技术进行无人机定位。基准站和无人机上安装的流动站同时接收同一时间、同一卫星发射的信号,基准站实时地将测量的载波相位观测值、伪距观测值、基准站坐标等数据,用4g网络传输给运动中的流动站,而流动站通过4g网络接收基准站所发射的信息,将载波相位观测值实时进行差分处理,得到无人机的坐标。
2、在实际应用中,无人机降落的场景主要是在城市,较多的高楼建筑会造成信号遮挡,以及多路径效应,从而造成无人机在降落过程中,无法获取到较为高精度的定位坐标,进而,使得无人机无法进行精准降落。
3、因此,如何能够提高无人机在降落过程中获取到的定位坐标的准确性,则是一个亟待解决的问题。
技术实现思路
1、本说明书提供一种确定无人机降落点的方法及装置,以部分的解决现有技术存在的上述问题。
2、本说明书采用下述技术方案:
3、本说明书提供了一种确定无人机降落点的方法,包括:
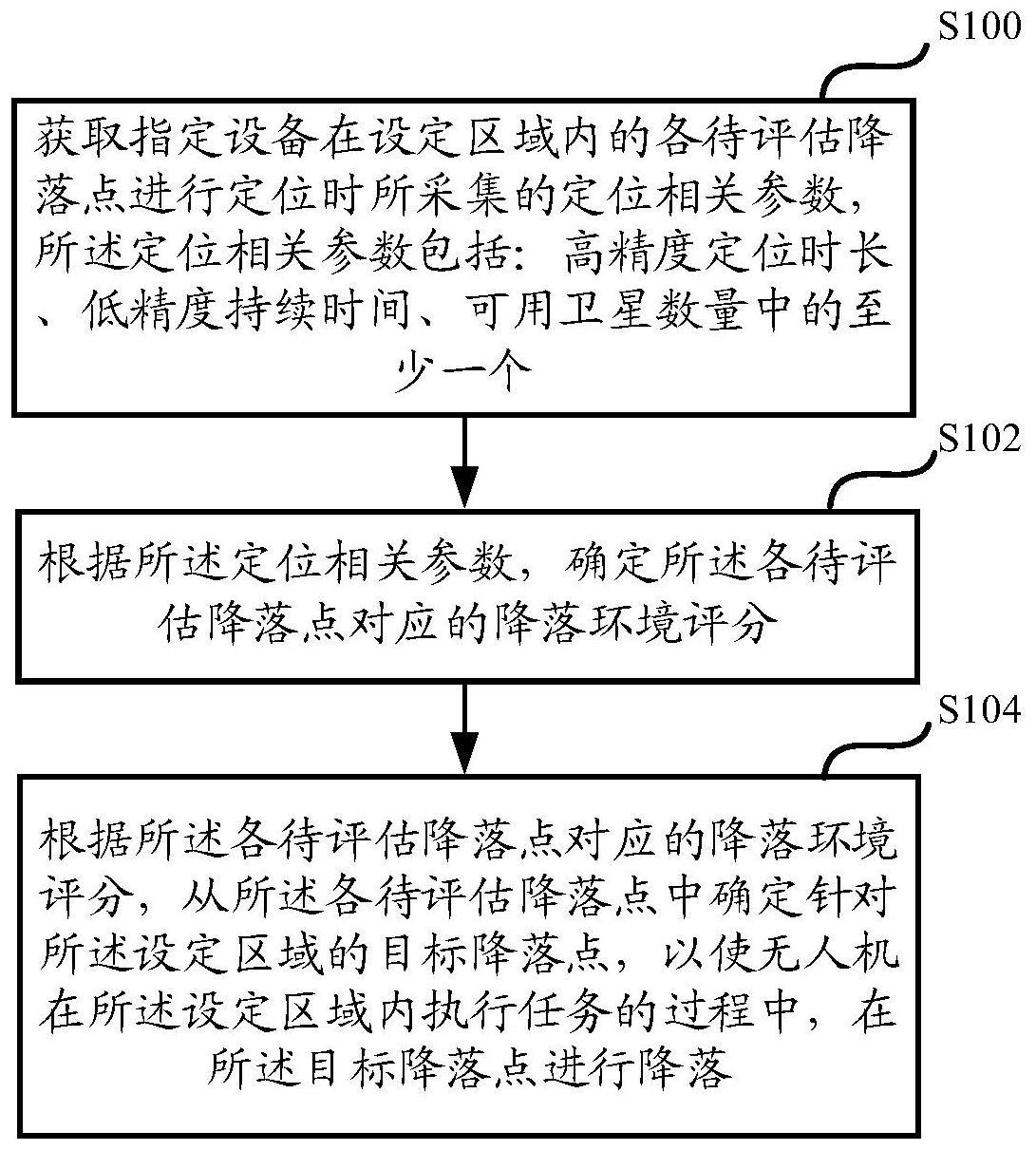
4、获取指定设备在设定区域内的各待评估降落点进行定位时所采集的定位相关参数,所述定位相关参数包括:高精度定位时长、低精度持续时间、可用卫星数量中的至少一个;
5、根据所述定位相关参数,确定所述各待评估降落点对应的降落环境评分;
6、根据所述各待评估降落点对应的降落环境评分,从所述各待评估降落点中确定针对所述设定区域的目标降落点,以使无人机在所述设定区域内执行任务的过程中,在所述目标降落点进行降落。
7、可选地,采集定位相关参数,具体包括:
8、针对所述设定区域内的每个待评估降落点,响应于所述指定设备放置于该待评估降落点,获取所述指定设备在该待评估降落点上进行定位时执行若干次采集得到的定位相关参数,其中;
9、针对每次采集,启动所述指定设备,以获取在该次采集中所述指定设备在设定时长内以静止状态在该待评估降落点上进行定位时所采集到的定位相关参数。
10、可选地,根据所述定位相关参数,确定所述各待评估降落点对应的降落环境评分,具体包括:
11、根据所述定位相关参数,确定所述指定设备在确定高精度定位的过程中所涉及的计算时长,作为高精度定位时长;
12、根据所述高精度定位时长,确定所述各待评估降落点对应的降落环境评分,其中,若是高精度定位时长越短,所述待评估降落点的降落环境评分越高。
13、可选地,根据所述定位相关参数,确定所述各待评估降落点对应的降落环境评分,具体包括:
14、根据所述定位相关参数,确定所述指定设备在所述各待评估降落点接收到的每个卫星对应的信噪比以及高度角;
15、针对每个卫星,根据该卫星对应的信噪比以及高度角,确定出符合预设条件的卫星,作为可用卫星;
16、根据可用卫星数量,确定所述各待评估降落点对应的降落环境评分,其中,所述可用卫星数量越多,所述待评估降落点的降落环境评分越高。
17、可选地,根据所述定位相关参数,确定所述各待评估降落点对应的降落环境评分,具体包括:
18、根据所述定位相关参数,确定所述指定设备在确定高精度定位后,定位精度降低的持续时间,作为低精度持续时间;
19、根据所述低精度持续时间,确定所述各待评估降落点对应的降落环境评分,其中,若是低精度持续时间越短,所述待评估降落点的降落环境评分越高。
20、可选地,根据所述定位相关参数,确定所述各待评估降落点对应的降落环境评分,具体包括:
21、根据所述高精度定位时长、所述低精度持续时间、所述可用卫星数量,以及所述定位相关参数中各项指标对应的参考权重,确定所述各待评估降落点对应的降落环境评分。
22、可选地,获取指定设备在设定区域内的各待评估降落点进行定位时所产生的定位相关参数,具体包括:
23、获取所述指定设备在所述设定区域内的各待评估降落点的序列,并获取所述指定设备在位于所述序列中首位的待评估降落点进行定位时所产生的定位相关参数,作为所述首位的待评估降落点所对应的定位相关参数。
24、可选地,根据所述定位相关参数,确定所述各待评估降落点对应的降落环境评分,具体包括:
25、根据所述首位的待评估降落点所对应的定位相关参数,确定所述首位的待评估降落点对应的降落环境评分;
26、根据所述各待评估降落点对应的降落环境评分,从所述各待评估降落点中确定针对所述设定区域的目标降落点,具体包括:
27、若所述首位的待评估降落点对应的降落环境评分大于设定评分,将所述首位的待评估降落点,作为针对所述设定区域内的目标降落点,否则,将所述首位的待评估降落点从所述序列中去除,得到更新后序列,并判断位于所述更新后序列中首位的待评估降落点对应的降落环境评分是否大于设定评分,直至确定出针对所述设定区域内的目标降落点为止。
28、本说明书提供了一种确定无人机降落点的装置,包括:
29、获取模块,用于获取指定设备在设定区域内的各待评估降落点进行定位时所采集的定位相关参数,所述定位相关参数包括:高精度定位时长、低精度持续时间、可用卫星数量中的至少一个;
30、确定模块,用于根据所述定位相关参数,确定所述各待评估降落点对应的降落环境评分;
31、降落模块,用于根据所述各待评估降落点对应的降落环境评分,从所述各待评估降落点中确定针对所述设定区域的目标降落点,以使无人机在所述设定区域内执行任务的过程中,在所述目标降落点进行降落。
32、本说明书提供了一种计算机可读存储介质,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述确定无人机降落点的方法。
33、本说明书提供了一种无人机,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现上述确定无人机降落点的方法。
34、本说明书采用的上述至少一个技术方案能够达到以下有益效果:
35、在本说明书提供的确定无人机降落点的方法中。首先,获取指定设备在设定区域内的各待评估降落点进行定位时所产生的定位相关参数。其次,根据定位相关参数,确定各待评估降落点对应的降落环境评分。最后,根据各待评估降落点对应的降落环境评分,从各待评估降落点中确定针对设定区域的目标降落点,以使无人机在设定区域内执行任务的过程中,在目标降落点进行降落。
36、从上述方法中可以看出,本方法可以通过指定设备在设定区域内的各待评估降落点进行定位时所产生的定位相关参数,确定出各待评估降落点对无人机降落的影响。相比于现有技术来说,本方法可以预先确定出各待评估降落点对无人机降落的影响,并从各待评估降落点中选取出合适的目标降落点,使得无人机可以进行精准降落。
技术特征:
1.一种确定无人机降落点的方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,采集定位相关参数,具体包括:
3.如权利要求1所述的方法,其特征在于,根据所述定位相关参数,确定所述各待评估降落点对应的降落环境评分,具体包括:
4.如权利要求1所述的方法,其特征在于,根据所述定位相关参数,确定所述各待评估降落点对应的降落环境评分,具体包括:
5.如权利要求1所述的方法,其特征在于,根据所述定位相关参数,确定所述各待评估降落点对应的降落环境评分,具体包括:
6.如权利要求1所述的方法,其特征在于,根据所述定位相关参数,确定所述各待评估降落点对应的降落环境评分,具体包括:
7.如权利要求1所述的方法,其特征在于,获取指定设备在设定区域内的各待评估降落点进行定位时所产生的定位相关参数,具体包括:
8.如权利要求7所述的方法,其特征在于,根据所述定位相关参数,确定所述各待评估降落点对应的降落环境评分,具体包括:
9.一种确定无人机降落点的装置,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述权利要求1~7任一项所述的方法。
11.一种无人机,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现上述权利要求1~7任一项所述的方法。
技术总结
本说明书公开了一种确定无人机降落点的方法及装置。首先,获取指定设备在设定区域内的各待评估降落点进行定位时所产生的定位相关参数。其次,根据定位相关参数,确定各待评估降落点对应的降落环境评分。最后,根据各待评估降落点对应的降落环境评分,从各待评估降落点中确定针对设定区域的目标降落点,以使无人机在设定区域内执行任务的过程中,在目标降落点进行降落。本方法可以预先确定出各待评估降落点对无人机降落的影响,并从各待评估降落点中选取出合适的目标降落点,使得无人机可以进行精准降落。
技术研发人员:张倩,柳青松,黄国权,陈刚,杨威,李智超,姚贺,龚赵慧,毛一年
受保护的技术使用者:北京三快在线科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!