一种机器人的障碍物定位跟踪方法和割草机器人与流程
本发明涉及机器人,特别是涉及一种机器人的障碍物定位跟踪方法和割草机器人。
背景技术:
1、机器人的工作环境中经常会出现障碍物,对障碍物检测以实现定位和避障是机器人的核心功能之一,因此,机器人上一般配置有可以探测障碍物的传感器,比如超声波、摄像头、tof(time of flight)摄像头等,采用这些单一传感器存在探测范围短、一致性低等局限性;而通常传感器检测效果越好,其硬件成本越高。因此,无法在有限成本之内获得较高精度的障碍物信息。
技术实现思路
1、本发明主要解决的技术问题是提供一种机器人的障碍物定位跟踪方法和割草机器人,能够在降低成本的同时提高障碍物的定位准确性。
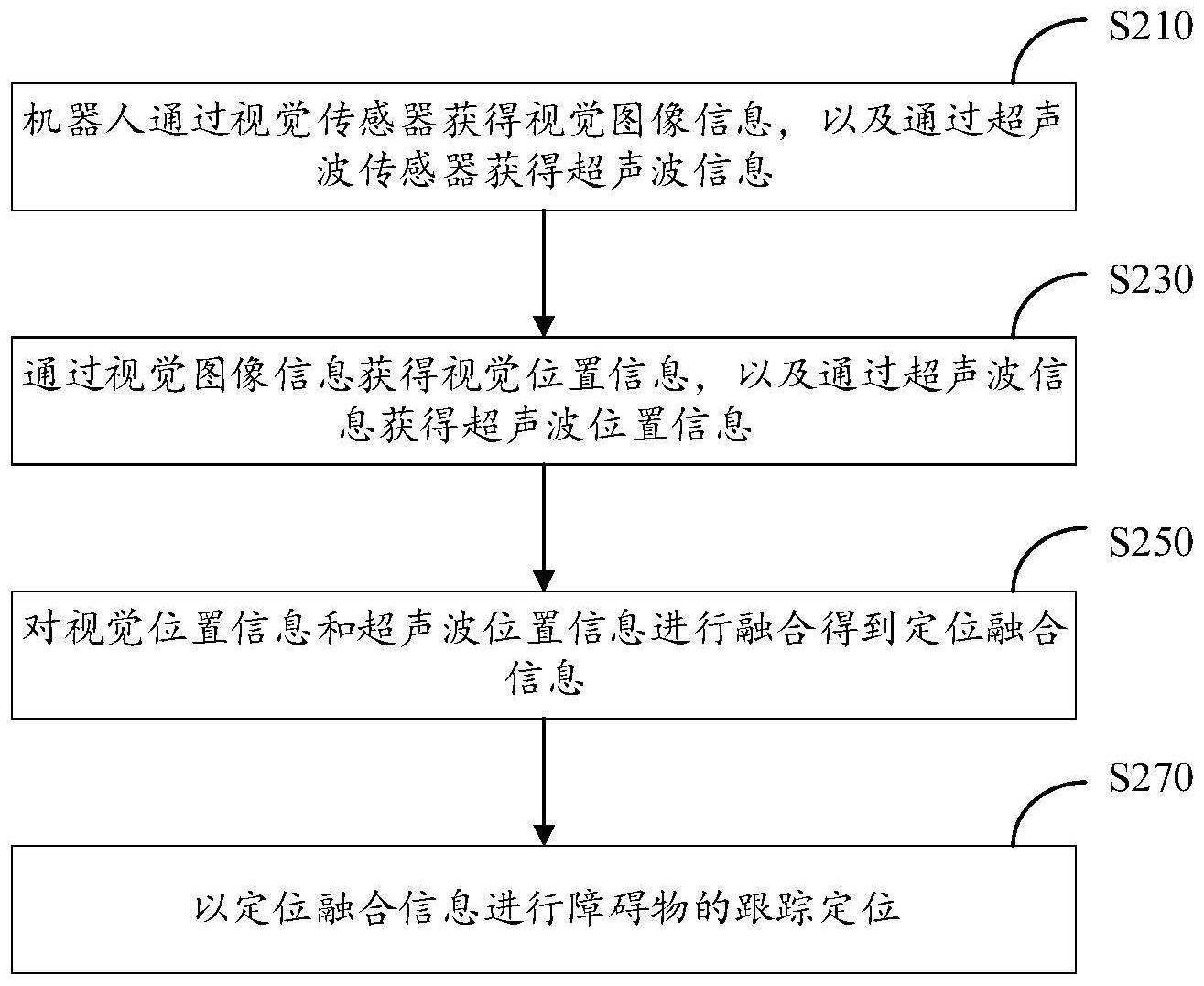
2、为解决上述技术问题,本发明采用的一个技术方案是:提供一种机器人的障碍物定位跟踪方法,该机器人的障碍物定位跟踪包括:机器人通过视觉传感器获得视觉图像信息,以及通过超声波传感器获得超声波信息;通过所述视觉图像信息获得视觉位置信息,以及通过所述超声波信息获得超声波位置信息,所述视觉位置信息是以所述视觉图像进行计算得到的所述障碍物位置,所述超声波位置信息是以所述超声波传感器进行测距得到的所述障碍物位置;对所述视觉位置信息和所述超声波位置信息进行融合得到定位融合信息;以所述定位融合信息进行所述障碍物的跟踪定位。
3、其中,所述通过所述视觉图像信息获得视觉位置信息,以及通过所述超声波信息获得超声波位置信息包括:通过所述视觉图像信息获得视觉距离信息,以及通过所述超声波信息获得超声波距离信息,所述视觉距离信息是从所述视觉图像中得到的所述机器人和所述障碍物之间的距离,所述超声波距离信息是从所述超声波信息中得到的所述机器人和所述障碍物之间的距离;所述对所述视觉位置信息和所述超声波位置信息进行融合得到定位融合信息包括:将所述视觉距离信息和所述超声波距离信息进行加权融合得到距离融合信息,其中,所述加权融合中的所述视觉距离信息系数为视觉距离置信度,所述加权融合中的所述超声波距离信息系数为超声波距离置信度。
4、其中,所述机器人通过视觉传感器获得视觉图像信息之后包括:识别所述视觉图像信息进而得到所述障碍物视觉类型;所述视觉距离置信度和所述超声波距离置信度采用以下方法获得:根据先验的物体反射率对应的超声波测距精度和距离的关系,建立预设物体超声测距反射率对应的测距的超声波置信度列表,以及根据先验的物体反射率对应的视觉测距精度和距离的关系,建立预设物体视觉测距反射率对应的测距的视觉置信度列表;以所述障碍物视觉类型为关键词查找所述物体超声测距反射率对应的所述超声波置信度列表和所述物体视觉测距反射率对应的所述视觉置信度列表,分别得到所述超声波距离置信度和所述视觉距离置信度。
5、其中,所述以所述障碍物类型为关键词查找所述超声波置信度列表和所述视觉置信度列表,分别得到所述超声波距离置信度和所述视觉距离置信度包括:若查找所述超声波置信度列表和/或所述视觉置信度列表后得不到结果,则以默认的置信度作为所述超声波距离置信度和/或所述视觉距离置信度。
6、其中,所述通过所述视觉图像信息获得视觉位置信息,以及通过所述超声波信息获得超声波位置信息包括:通过所述视觉图像信息获得视觉方向信息,以及通过所述超声波信息获得超声波方向信息,所述视觉方向信息是以所述视觉图像进行计算得到的所述障碍物相对所述机器人的方向,所述超声波方向信息是以所述超声波传感器进行测距得到的所述障碍物相对所述机器人的方向;所述将所述视觉距离信息和所述超声波距离信息进行加权融合得到所述距离融合信息之后包括:将所述距离融合信息与所述视觉方向信息和所述超声波方向信息结合,以对所述视觉位置信息以及所述超声波位置信息进行更新,得到第一位置融合信息。
7、其中,所述对所述视觉位置信息以及所述超声波位置信息进行更新,得到第一位置融合信息之后包括:将所述第一位置融合信息作为所述定位融合信息。
8、其中,所述利用所述距离融合信息与所述视觉方向信息和所述超声波方向信息结合,以对所述视觉位置信息以及所述超声波位置信息进行更新,得到所述第一位置融合信息之后包括:将所述第一位置融合信息转换为世界坐标系下的第二位置融合信息;对所述障碍物的预测位置信息和所述第二位置融合信息进行融合,得到第三位置融合信息。
9、其中,所述对所述障碍物的预测位置信息和所述第二位置融合信息进行融合,得到第三位置融合信息包括:获取所述预测位置信息和所述前一时刻的定位融合信息之间的距离;响应于所述距离小于或等于预设距离,且所述障碍物历史类型和所述障碍物视觉类型相同,则对所述障碍物的预测位置信息和所述第二位置融合信息进行融合,得到所述第三位置融合信息。
10、其中,所述对所述障碍物的预测位置信息和所述第二位置融合信息进行融合,得到第三位置融合信息包括:利用卡尔曼滤波对所述障碍物的预测位置信息和所述第二位置融合信息进行融合,得到所述第三位置融合信息。
11、其中,所述利用卡尔曼滤波对所述障碍物的预测位置信息和所述第二位置融合信息进行融合,得到所述第三位置融合信息之后包括:将所述第三位置融合信息作为所述定位融合信息。
12、其中,所述障碍物的所述预测位置信息通过以下方法获得:获取障碍物历史类型,所述障碍物历史类型为所述障碍物前一时刻的所述视觉类型;基于所述障碍物历史类型得到所述障碍物对应的运动模型;利用所述运动模型和所述障碍物的前一时刻的定位融合信息,预测当前时刻所述障碍物的所述预测位置信息。
13、其中,所述基于所述障碍物历史类型得到所述障碍物对应的运动模型包括:响应于所述障碍物历史类型为静态障碍物,得到所述障碍物对应的所述运动模型为恒定模型;响应于所述障碍物历史类型为动态障碍物,得到所述障碍物对应的所述运动模型为一般运动学模型,其中,一般运动学模型包括匀速模型或匀加减速模型,或包括匀速和匀加减速混合模型。
14、其中,该方法还包括:响应于所述距离大于预设距离,或所述障碍物历史类型和所述障碍物视觉类型不同,则将所述障碍物认定为新增障碍物,将所述距离融合信息和所述障碍物的方向融合信息进行结合得到第四位置融合信息;其中,所述方向融合信息是取所述视觉方向信息和所述超声波方向信息的平均方向信息而得到;将所述第四位置融合信息作为所述定位融合信息。
15、其中,所述将所述第三位置融合信息作为所述定位融合信息之后包括:累计所述障碍物的信息的未更新时长;响应于所述未更新时长大于预设时长,删除所述障碍物的信息。
16、其中,所述超声波传感器为两个,所述机器人通过超声波传感器获得超声波信息包括:通过所述两个超声波传感器获得两个对应的超声波测距信息;基于所述两个超声波传感器之间的间距和所述两个对应的超声波测距信息,利用三角测量法计算得到所述超声波信息,所述超声波信息包括所述超声波距离信息和所述超声波方向信息。
17、其中,视觉传感器为单目二位视觉传感器。
18、为解决上述技术问题,本发明采用的一个技术方案是:提供一种割草机器人,该割草机器人包括,机体;割草组件,安装于所述机体;信息采集组件,安装于所述机体并用于采集视觉图像信息和超声波信息;控制器,连接所述机体和所述信息采集组件,用于控制所述机体配合所述信息采集组件,采用上述的机器人的障碍物定位跟踪方法对障碍物定位跟踪。
19、本发明的有益效果是:区别于现有技术的情况,本技术提供一种机器人的障碍物定位跟踪方法,通过分别采用视觉传感器和超声波传感器对障碍物进行检测,得到障碍物的位置信息,相对双目相机类视觉传感器,本技术的视觉传感器硬件成本更低,同时需要计算量更少,对硬件资源要求低,将两个传感器获取的信息进行融合,得到定位融合信息以实现两种检测结果的互相补偿和修正,以降低机器人整体检测误差。相较于单一测距传感器或者单一图像传感器,可以获得更加准确可靠的障碍物定位、跟踪结果;相较于高级的三维传感器,硬件成本更低,具有更高的实际使用价值。
- 还没有人留言评论。精彩留言会获得点赞!