行走臂组件及具有其的轨道探伤仪的制作方法
1.本实用新型涉及轨道探伤技术领域,尤其是涉及一种行走臂组件及具有其的轨道探伤仪。
背景技术:
2.我国铁路路网规模稳步增长,铁路是国家重要的交通设施,是国家经济发展的大动脉,担负着繁重的客货运输任务,和人民群众的生产、生活息息相关。目前,我国铁路营业里程已突破14万公里。为了保证铁路运输安全,提高铁路工务钢轨探伤效率和探伤质量显得尤为重要。
3.现有普遍采用的探伤仪为手推式探伤车,用于对轨道进行探伤的探伤机构设置于车体上,需要人工推动探伤车在单轨或双轨上前进。
4.本技术人发现现有技术至少存在以下技术问题:
5.1、现有的轨道探伤仪探测效率低,需要人工推动或驾驶探伤仪前进,人员消耗大。
6.2、需要人工监测轨道是否有列车靠近,轨道上是否有障碍物等,探测效率低。
技术实现要素:
7.本实用新型的目的在于提供一种行走臂组件及具有其的轨道探伤仪,以解决现有技术中存在的轨道探伤车需人工推动探测,人员消耗大、探测效率低的技术问题;本实用新型提供的诸多技术方案中的优选技术方案所能产生的诸多技术效果详见下文阐述。
8.为实现上述目的,本实用新型提供了以下技术方案:
9.本实用新型提供的行走臂组件,设置于探伤机构上,所述行走臂组件至少包括第一关节臂和第二关节臂,其中:
10.所述第一关节臂与所述探伤机构转动连接,且其下部与所述第二关节臂铰接;所述第一关节臂和所述第二关节臂两者中任一沿所述探伤机构的前后方向摆动以带动所述探伤机构行进,且两者中另一沿所述探伤机构的左右方向摆动以爬上轨道进而行进或爬下轨道。
11.优选的,所述第一关节臂连接有第一驱动设备和第一支架,其中:
12.所述第一支架设置于所述第一关节臂两端,所述第一驱动设备固定于所述探伤机构上,且其输出端与位于所述第一关节臂上端的所述第一支架连接,并在第一平面内转动以带动所述第一关节臂前后摆动。
13.优选的,所述第二关节臂连接有第二驱动设备和第二支架,其中:
14.所述第二支架至少设置于所述第一关节臂上端,所述第二驱动设备与位于所述第一关节臂下端的所述第一支架铰接,且其输出端与所述第二支架连接,并在第二平面内转动以带动所述第二关节臂左右摆动,其中,所述第二平面与所述第一平面垂直。
15.优选的,所述行走臂组件还包括有第三关节臂,所述第三关节臂为脚板,所述脚板连接有第三驱动设备,其中:所述第三驱动设备与所述第二关节臂铰接,且其输出端与所述
脚板连接,并在所述第一平面内转动以带动所述脚板前后摆动。
16.优选的,所述行走臂组件还包括有驱动轮组件,所述驱动轮组件设置于能够左右摆动的所述第一关节臂或所述第二关节臂上,所述驱动轮组件包括驱动轮本体和驱动装置,其中:
17.所述驱动装置与所述驱动轮本体连接并带动其转动,所述驱动轮本体沿水平方向延伸设置,并在所述行走臂组件爬上所述轨道时沿所述轨道表面转动行进。
18.优选的,所述行走臂组件连接有图像采集装置和控制单元,其中:
19.所述图像采集装置用于采集所述轨道处的图像信息;
20.所述控制单元与所述图像采集装置连接,用于接收所述图像采集装置的图像信息并控制所述第一关节臂和/或所述第二关节臂摆动。
21.优选的,所述行走臂组件还连接有角度检测装置,所述角度检测装置与所述控制单元连接用于感知所述探伤机构的位置角度信息;
22.所述控制单元用于接收所述角度检测装置发送的角度信息,并控制所述第一关节臂和/或所述第二关节臂运动以使所述探伤机构的重心始终位于所述轨道的中心位置。
23.本实用新型还提供了一种轨道探伤仪,包括探伤机构和上述行走臂组件。
24.优选的,所述探伤机构包括探伤轮组件和与所述行走臂组件连接的探伤本体,所述探伤轮组件包括框架和旋转轮,其中:
25.所述框架与所述探伤本体连接,所述旋转轮安装于所述框架内,所述旋转轮内安装有超声波探头并充满有耦合液,所述旋转轮在所述行走臂组件爬上所述轨道时沿所述轨道表面滚动。
26.优选的,所述轨道探伤仪还包括有耦合液箱和喷淋组件,所述喷淋组件包括喷淋头和流量控制阀,其中:
27.所述耦合液箱固定于所述探伤本体上,所述喷淋头与所述耦合液箱连接,且所述流量控制阀位于所述喷淋头和所述耦合液箱之间的管路上。
28.本实用新型与现有技术相比,具有如下有益效果:
29.1、本实用新型提供的行走臂组件,安装于探伤机构上,通过沿探伤机构前后方向摆动的第一行走臂或第二行走臂行走,通过沿探伤机构左右方向摆动的第一行走臂或第二行走臂能带动探伤机构爬上轨道,进而在轨道上行进;当轨道上有障碍物,如列车时,行走臂组件带动探伤机构爬下轨道,等列车通过后行走臂组件再带动探伤机构爬上钢轨。无需人工手动搬运探伤机构上下轨道、能够躲避障碍,无需人工推动行进,减少了人员成本,提高了探测效率。
30.2、本实用新型提供的轨道探伤仪,由于具备上述行走臂组件,故同样具有无需人工手动搬运探伤机构上下轨道、能够躲避障碍,减少人员操作成本、提高探测效率的优点。
附图说明
31.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
32.图1是本实用新型具有行走臂组件的轨道探伤仪在轨道下行走的结构示意图;
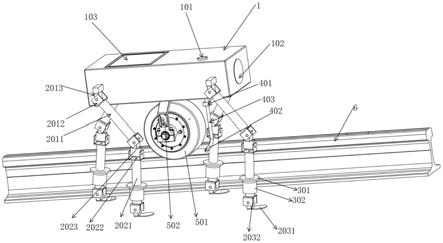
33.图2是具有行走臂组件的轨道探伤仪在轨道上滚动的结构示意图。
34.图中1、探伤本体;101、耦合液箱;102、相机;103、控制箱;2011、第一关节臂;2012、第一支架;2013、第一驱动设备;2021、第二关节臂;2022、第二支架;2023、第二驱动设备;2031、脚板;2032、第三驱动设备;301、驱动轮本体;302、驱动装置;401、流量控制阀;402、喷淋头;403、管路;501、旋转轮;502、框架;6、轨道。
具体实施方式
35.为使本实用新型的目的、技术方案和优点更加清楚,下面将对本实用新型的技术方案进行详细的描述。显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本实用新型所保护的范围。
36.在本实用新型的描述中,需要理解的是,术语“中心”、“长度”、“宽度”、“高度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“侧”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
37.在本实用新型的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
38.本实用新型实施例提供了一种能够带动探伤机构爬上、爬下钢轨,且能在钢轨下行走、在钢轨上滚动的行走臂组件及具有其的轨道探伤仪。
39.下面结合图1和图2对本实用新型提供的技术方案进行更为详细的阐述。
40.实施例1
41.如图1和图2所示,本实施例提供了一种行走臂组件,设置于探伤机构上,行走臂组件至少包括第一关节臂2011和第二关节臂2021,其中:第一关节臂 2011与探伤机构转动连接,且其下部与第二关节臂2021铰接;第一关节臂2011 和第二关节臂2021两者中任一沿探伤机构的前后方向摆动以带动探伤机构行进,且两者中另一沿探伤机构的左右方向摆动以爬上轨道6进而行进或爬下轨道6。
42.其中,当第一关节臂2011沿探伤机构的左右方向摆动时,可与探伤机构的下部连接,当第一关节臂2011沿探伤机构的前后方向摆动时,可与探伤机构的侧部连接。
43.当沿前后方向摆动的关节臂用于行走时,另一沿左右方向摆动的关节臂用于调节行走方向、或爬上、爬下轨道。第一关节臂2011和第二关节臂2021的结构使得探伤机构能够前后、左右摆动,调整前进方向,在轨道6下行走或爬上轨道6进而在轨道6上滚动,无需人工推动前进,无需人工将探伤机构搬上、搬下轨道6。
44.具体的,参见图1和图2所示,本实施例中第一关节臂2011前后摆动,第二关节臂
2021左右摆动。当第一关节臂2011前后摆动且第二关节臂2021不摆动时探伤机构沿直线行走,当第一关节臂2011前后摆动且同时第二关节臂2021 摆动时,可调节前进方向。
45.优选的,行走臂组件位于探伤机构两侧,且每侧行走臂组件中至少包括有两组以上的第一关节臂2011和第二关节臂2021。参见图1和图2所示,探伤机构上连接有四组行走臂组件,且所有行走臂组件对称设置于探伤机构两侧;该结构能够使得探伤机构行走或者爬上、爬下轨道时候更为稳定,防止支撑力不足。
46.下面对第一关节臂2011及第二关节臂2021的结构进行说明:
47.作为可选的实施方式,参见图1和图2所示,第一关节臂2011连接有第一驱动设备2013和第一支架2012,其中:第一支架2012设置于第一关节臂2011 两端,第一驱动设备2013固定于探伤机构侧部,且其输出端与位于第一关节臂2011上端的第一支架2012连接,并在第一平面内转动以带动第一关节臂2011 前后摆动。
48.参见图1,第一支架2012为u型架,u型架的两侧竖直段便于与第一驱动设备2013传动连接。第一关节臂2011的两端与u型架的水平段连接。其中,上述第一驱动设备2013可为电机等,电机与第一支架2012传动连接,具体的,上述第一驱动设备2013可直接采用市场上现有的舵机,舵机的输出轴上连接舵盘,舵盘与第一支架2012的一侧连接,第一支架2012的另一端通过转轴与舵机连接;舵机输出轴的转动通过舵盘带动第一支架2012转动,从而实现第一关节臂2011的摆动。
49.参见图1所示,第一驱动设备2013输出端(舵盘)在平行于纸面的方向(第一平面内)转动,使第一关节臂2011沿探伤机构的前后方向摆动。
50.第二关节臂2021的结构与第一关节臂2011结构相似,具体的,参见图1 所示,第二关节臂2021连接有第二驱动设备2023和第二支架2022,其中:第二支架2022至少设置于第一关节臂2011上端,第二驱动设备2023与位于第一关节臂2011下端的第一支架2012铰接,第二关节臂2021的不同之处在于,第二驱动设备2023的输出端与第二支架2022连接,并在第二平面内转动以带动第二关节臂2021左右摆动,其中,第二平面与第一平面垂直。
51.上述第二驱动设备2023与第二支架2022的连接方式可与第一驱动设备 2013与第一支架2012的连接方式相同,在此不做赘述。参见图1所示,在图1 中第二平面指的是垂直于纸面内的方向。
52.第一关节臂2011和第二关节臂2021的配合结构能够实现在轨道下地面上的行进,当需要爬上轨道时,参见图2所示,探伤机构一侧的第二关节臂2021 左右摆动,爬上钢轨,之后探伤机构另一侧的第二关节臂2021左右摆动爬上钢轨,并调节平衡。
53.为了保证行走臂组件在行走时的稳定性,作为可选的实施方式,参见图1 和图2所示,行走臂组件还包括第三关节臂,第三关节臂铰接于第二关节臂2021 的下部,并沿前后方向摆动用于与地面接触行进。具体的,参见图1和图2所示,第三关节臂为脚板2031,脚板2031连接有第三驱动设备2032,其中:第三驱动设备2032与第二关节臂2021铰接,且其输出端与脚板2031连接,并在第一平面内转动以带动脚板2031前后摆动。
54.为了连接第三关节臂(脚板2031),第二关节臂2021的下端同样设置有第二支架2022,第二支架2022与第三驱动设备2032铰接。上述第三驱动设备 2032与脚板2031的连接结构与第一驱动设备2013和第一支架2012的连接结构相同,在此不做赘述。
55.上述第三关节臂能够通过脚板2031增大与地面的接触面积,第三关节臂的结构模
仿人体踝关节的结构,保证行走臂组件带动探伤机构行进时的稳定性。
56.参见图1,图1示出了行走臂组件带动探伤机构在地面上行走时的状态,此时探伤机构靠行走臂组件带动前进。而参见图2所示,图2为探伤机构爬上轨道的状态,此时为了能够使得探伤机构沿轨道行进并实施探伤作业,作为可选的实施方式,本实施例中的行走臂组件还包括有驱动轮组件,驱动轮组件设置于能够左右摆动的第一关节臂2011或第二关节臂2021上,驱动轮组件包括驱动轮本体301和驱动装置302,其中:驱动装置302与驱动轮本体301连接并带动其转动,驱动轮本体301沿水平方向延伸设置,并在行走臂组件爬上轨道时沿轨道表面转动行进。
57.参见图1和图2所示,为了使得当行走臂组件带动探伤机构爬上轨道时,探伤机构刚好位于轨道表面,优选的,本实施例中的驱动轮组件设置于第二关节臂2021上。上述驱动装置302可以为电机,参见图1所示,电机的输出轴与驱动轮本体301驱动连接,该连接方式为本领域内的成熟技术,在此不做赘述。
58.当行走臂组件在地面上行走时,驱动轮本体301无需转动;当行走臂组件爬上轨道时,参见图2,驱动装置302带动驱动轮本体301沿着轨道侧壁行进。
59.优选的,驱动轮本体301的至少用于与轨道侧壁接触的一侧连接有法兰,能够保证驱动轮本体301与钢轨接触,且在轨道的一侧起到限位作用。
60.上述第一关节臂2011、第二关节臂2021和第三关节臂,可通过控制与其连接的驱动设备,控制行走臂组件的运动状态,为了提高自动化程度,作为可选的实施方式,行走臂组件连接有图像采集装置和控制单元,其中:图像采集装置用于采集轨道处的图像信息;控制单元与图像采集装置导线连接或无线连接,用于接收图像采集装置的图像信息并控制第一关节臂2011和/或第二关节臂2021和/或第三关节臂摆动。
61.具体的,上述图像采集装置可以为图像采集相机102,相机102采集轨道上的图像信息并将该信息传输至控制单元。控制单元与第一驱动设备2013、第二驱动设备2023和第三驱动设备2032连接,对数据进行处理,当相机102采集到列车等障碍物信息时,控制单元控制第二驱动设备2023转动,从而使第二行走臂左右摆动爬下钢轨,具体的,先控制探伤机构一侧的第二行走臂摆动,再控制另一侧第二行走臂摆动。上述控制单元可以为51单片机等,其为现有的成熟技术,在此不做赘述,可在控制单元内编写相应控制程序,实现控制单元对第二驱动设备2023的运动状态进行控制;行走臂组件爬下轨道6后,控制单元继续控制第一驱动设备和第三驱动设备运动,使行走臂组件带动探伤机构在地面上行进以躲避障碍。
62.为了使得行走臂组件在爬上、爬下轨道时,使探伤机构保持平衡,作为可选的实施方式,本实施例中的行走臂组件还连接有角度检测装置,角度检测装置与控制单元连接用于感知探伤机构的位置角度信息;控制单元用于接收角度检测装置发送的角度信息,并控制第一关节臂2011和/或第二关节臂2021运动以使探伤机构的重心始终位于轨道的中心位置。
63.其中,上述角度检测装置可以为陀螺仪等,陀螺仪为现有的成熟设备。当探伤机构一侧的行走臂组件爬上轨道后,陀螺仪感知探伤机构的角度信息,并将该角度信息输送至控制单元,控制单元根据接收到的信息控制第一驱动设备 2013、第二驱动设备2023和第三驱动设备2032的运动状态,使探伤机构保持平衡,防止探伤机构站立不稳。例如,当陀螺仪
检测到探伤机构的重心偏右,此时,控制单元对该角度信息进行处理,并控制探伤机构一侧或两侧的第二驱动设备2023转动,具体的,可控制左侧第二关节臂2021增大与第一关节臂2011 之间的角度,或者控制右侧第二关节臂2021减小与第一关节臂2011的角度,直至使探伤机构的重心调节至轨道中心位置。
64.优选的,控制单元还电连接有触控显示屏,触控显示屏用于向控制单元内输入信息。触控显示屏设置于控制箱103上,具有控制单元的电路板位于控制箱103内。
65.实施例2
66.参见图1和图2所示,本实施例提供了一种轨道探伤仪,包括探伤机构和上述行走臂组件。
67.上述轨道探伤仪,由于具备实施例1中的行走臂组件,故同样具有无需人工手动搬运探伤机构上下轨道、能够躲避障碍,减少人员操作成本、提高探测效率的优点。
68.作为可选的实施方式,参见图1和图2所示,探伤机构包括探伤轮组件和与行走臂组件连接的探伤本体1,上述电控箱设置于探伤本体1上,图像采集相机102设置于探伤本体1的前端,行走臂组件设置于探伤本体1的两侧。
69.探伤轮组件包括框架502和旋转轮501,其中:框架502与探伤本体1连接,旋转轮501安装于框架502内,旋转轮501内安装有两个以上的超声波探头并充满有耦合液,当行走臂组件爬上轨道,且驱动轮组件带动探伤结构在轨道上前进时,旋转轮501本体在轨道6表面滚动进行探伤作业。
70.作为可选的实施方式,参见图1所示,轨道探伤仪还包括有耦合液箱101 和喷淋组件,喷淋组件包括喷淋头402和流量控制阀401,其中:耦合液箱101 固定于探伤本体1上,喷淋头402与耦合液箱101连接,且流量控制阀401位于喷淋头402和耦合液箱101之间的管路403上。优选的,上述流量控制阀401 为电磁阀,且与控制单元连接,在带有触控显示屏的控制箱103控制下,通过调节流量控制阀401的开关量,可改变喷淋头402喷出耦合水的流量,使用方便。
71.本实施例中的行走臂组件在具体工作时:
72.在带有触控显示屏的控制箱103控制下,带有第一驱动设备2013(电机或舵机)的第一关节臂2011和带有第三驱动设备2032(电机或舵机)的第三关节臂沿纵向前后摆动,带有第二驱动设备2023(电机或舵机)的第二关节臂2021 沿横向左右摆动;
73.在带有触控显示屏的控制箱103控制下,通过调节流量控制阀401的开关量,可改变喷淋头402喷出耦合水的流量;
74.行走时,图像采集相机102将采集到的图像信息交给带有触控显示屏的控制箱103内的控制单元进行处理,并根据处理结果向四组多关节的行走臂组件发出指令,确定行走方向和步伐;在轨下爬行如图1,在轨上滚动行走如图2;
75.在轨道探伤仪爬上轨道的过程中,其中一侧的多关节行走臂组件先抬起上轨,此时,带有触控显示屏的控制箱103内的陀螺仪将感知的角度信息交给带有触控显示屏的控制箱103内的控制单元进行处理,并根据处理结果向四只多关节的行走臂组件发出指令,保持平衡,同时另一侧的多关节行走臂组件再爬上轨道;
76.轨道探伤仪爬下轨道的过程为爬上轨道的逆过程。
77.本实施例中的轨道探伤仪,适用于对单轨进行探伤作业。
78.在本说明书的描述,具体特征、结构或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
79.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所述权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1